一种永磁同步电机转子初始位置辨识方法与流程
本发明涉及电机控制,具体是一种永磁同步电机转子初始位置辨识方法。
背景技术:
1、一个性能良好的永磁同步电机转子初始位置检测方法不仅需要较高的精度,还需要良好的带载能力和广泛的适用性。基于位置传感器的转子预定位法精度受负载影响较大,而且运行时转子需要旋转。虽然采取多次试探的方法可以减小预定位时转子的旋转范围,但仍无法实现估计过程转子完全静止,这将导致定位的出现偏差,转子初始位置偏差将造成电机驱动系统无法准确的控制交轴电流并产生不可控的直轴电流。这部分不可控的直轴电流并没有产生转矩,而是产生不必要的电枢反应,造成电机的损耗增大,相同电磁转矩下需要的绕组电流也增大。且进行弱磁控制时,不可控的电枢反应也将影响弱磁控制的效果和调速范围。
2、针对上述问题,我们提供了一种永磁同步电机转子初始位置辨识方法,以解决上述所提到的问题。
技术实现思路
1、本发明针对现有方法在应用中存在的问题,本发明采用高频信号注入法进行转子初始位置辨识,高频信号注入法是基于永磁同步电机的高频模型,利用电机结构的物理特性或电感的饱和特性,通过向电机内注入高频信号形成凸极性,该凸极性与电机转子的位置有着明确的关系,通过控制算法来跟踪电机的凸极位置,从而得到电机的转子位置与转速。
2、具体的,本发明的目的在于提供一种永磁同步电机转子初始位置辨识方法,具体包括如下步骤:
3、步骤一:
4、定义转子位置估计误差△θ:
5、
6、式中,θ为转子位置实际值,转子位置估计值,设d-q为实际的两相旋转坐标系,为估计的两相旋转坐标系,则有如下关系:
7、
8、psms两相旋转坐标系下,当电机处于静止状态时,电压方程可简化为:
9、
10、式中,zd、zq分别为d、q轴的阻抗;
11、综合式(3)和式(4):
12、
13、综合式(2)和式(5),得到两相旋转坐标系下的电流响应:
14、
15、整理式(6):
16、
17、令:
18、
19、则:
20、zd=z+δz (10)
21、zq=z-δz (11)
22、综合式(7)、式(8)、式(9):
23、
24、式(12)即为估计的两相旋转坐标系即下的电流关于估算角度差δθ的关系式;
25、步骤二:提取出位置估计误差δθ,可在估计的两相旋转坐标系上的轴施加高频电压信号,即:
26、
27、式(13)中,umh为高频电压信号的幅值,ωh为高频电压信号的频率,综合式(12)和式(13)得到:
28、
29、令:
30、
31、将式(8)变为复数形式,并综合式(15):
32、
33、对进行适当变换:
34、
35、再将式(17)换成幅角形式:
36、
37、式中,|zd|、|zq|、分别为d、q轴高频阻抗幅值与相角;
38、步骤三:对的信号处理,即先将与调制信号sin(ωht)相乘,然后低通滤波,即最终得到估计误差δθ的表达式fδθ:
39、
40、对式(19)化简:
41、
42、式(20)中,k的表达式:
43、
44、步骤四:对fδθ进行积分运算可得到估算角度,则得到角度估算系统的反馈估算角度设积分系数为ki,得到:
45、
46、当δθ较小时,化简式(22):
47、
48、其中,为i型负反馈闭环控制系统,实际角度θ是闭环系统的输入参考值,估计角度是闭环系统的输出量。
49、作为本发明进一步的方案:所述步骤三中对增加滤波器lpf1后再与调制信号sin(ωht)相乘,然后再低通滤波。
50、作为本发明进一步的方案:所述步骤三增加的滤波器lpf2,且lpf2滤波参数与所述lpf1保持一致。
51、作为本发明进一步的方案:所述步骤四中θestfeedback的积分运算变为比例积分运算。
52、作为本发明进一步的方案:所述步骤二中,在估计的两相旋转坐标系上的轴施加高频电压信号前,增加umh的pi环节,即umh由手动选择合适值变为给定下电流参考幅值自动由pi调整。
53、作为本发明进一步的方案:所述取值范围为:0.05imotormax~0.1imotormax,imotormax为电机峰值电流。
54、作为本发明进一步的方案:所述步骤四后增加磁极辨识步骤,具体包括:所述fδθ的积分即θestfeedback为估算角度θest,分别在正负脉冲下,正负脉冲电压的幅值为upauto,在相同的时间tauto内,分别对电流响应积分得到idi-pulse1和idi-pulse2,若|idi-pulse1|>|idi-pulse2|,则表明θest=θ,否则θest=θ-π。
55、与现有技术相比,本发明的有益效果是:
56、1.本发明定位精度不受负载影响且定位过程中转子保持静止,同时针对传统脉诊高频注入方法准确性和可靠性的问题,提出了优化高频信号注入方法和判断条件来提高初始角检测的精度和可靠性,该方法简单有效,具有较大的工程应用价值;
57、2.本发明采用高频信号注入法进行转子初始位置辨识,高频信号注入法是基于永磁同步电机的高频模型,利用电机结构的物理特性或电感的饱和特性,通过向电机内注入高频信号形成凸极性,该凸极性与电机转子的位置有着明确的关系,通过控制算法来跟踪电机的凸极位置,从而得到电机的转子位置与转速,该类方法对电机参数的变化较不敏感,具有良好的鲁棒性,对低速或零速运行状态下的电机转子位置估计更有优势。
58、说明书附图
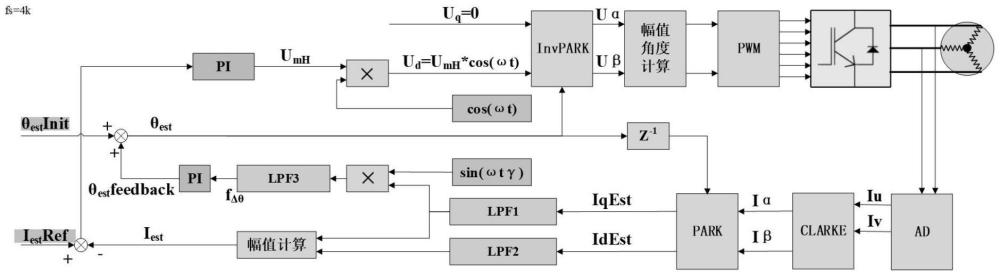
59、图1为本发明角度估算控制框图;
60、图2为估计角度计算等效于单位负反馈系统的系统框图;
61、图3为本发明进一步改进的角度估算控制框图(实施例2);
62、图4为不同δθ下的仿真波形;
63、图5为filter1的幅值与相位响应如图;
64、图6为不同频率下filter1的幅值与相位响应图;
65、图7为不同δθ下和的仿真波形;
66、图8为filter2的幅值与相位响应;
67、图9为典型直轴电感-电流曲线;
68、图10为直轴电路等效的rl电路
69、图11为正负脉冲下直轴电流响应曲线。
技术特征:
1.一种永磁同步电机转子初始位置辨识方法,其特征在于:具体包括如下步骤:步骤一:
2.根据权利要求1所述的一种永磁同步电机转子初始位置辨识方法,其特征在于,所述步骤三中对增加滤波器lpf1后再与调制信号sin(ωht)相乘,然后再低通滤波。
3.根据权利要求2所述的一种永磁同步电机转子初始位置辨识方法,其特征在于,所述步骤三增加的滤波器lpf2,且lpf2滤波参数与所述lpf1保持一致。
4.根据权利要求1所述的一种永磁同步电机转子初始位置辨识方法,其特征在于,所述步骤四中θestfeedback的积分运算变为比例积分运算。
5.根据权利要求1所述的一种永磁同步电机转子初始位置辨识方法,其特征在于,所述步骤二中,在估计的两相旋转坐标系上的轴施加高频电压信号前,增加umh的pi环节,即umh由手动选择合适值变为给定下电流参考幅值自动由pi调整。
6.根据权利要求5所述的一种永磁同步电机转子初始位置辨识方法,其特征在于,所述取值范围为:0.05imotormax~0.1imotormax,imotormax为电机峰值电流。
7.根据权利要求1-6任一所述的一种永磁同步电机转子初始位置辨识方法,其特征在于,所述步骤四后增加磁极辨识步骤,具体包括:所述fδθ的积分即θestfeedback为估算角度θest,分别在正负脉冲下,正负脉冲电压的幅值为upauto,在相同的时间tauto内,分别对电流响应积分得到idi-pulse1和idi-pulse2,若|idi-pulse1|>|idi-pulse2|,则表明θest=θ,否则θest=θ-π。
技术总结
本发明公开了一种永磁同步电机转子初始位置辨识方法,涉及电机控制技术领域,本发明采用高频信号注入法进行转子初始位置辨识,高频信号注入法是基于永磁同步电机的高频模型,利用电机结构的物理特性或电感的饱和特性,通过向电机内注入高频信号形成凸极性,该凸极性与电机转子的位置有着明确的关系,通过控制算法来跟踪电机的凸极位置,从而得到电机的转子位置与转速,该类方法对电机参数的变化较不敏感,具有良好的鲁棒性,对低速或零速运行状态下的电机转子位置估计更有优势。
技术研发人员:龚健
受保护的技术使用者:长沙市创安电气有限公司
技术研发日:
技术公布日:2024/11/7
- 还没有人留言评论。精彩留言会获得点赞!