一种光伏电站运维设备的制作方法
本说明书的实施例涉及光伏电池板清洁领域,尤其涉及一种光伏电站运维设备。
背景技术:
1、光伏电站是指一种利用太阳光能与电网相连并向电网输送电力的光伏发电系统,光伏电站中的光伏板等光伏组件作为发电系统的核心部分,通常设置在户外以便接收太阳光照射将太阳能转化成电能。为了不影响光伏板的吸光面积和吸光效率等,需要对光伏板表面进行定时清洁。现有的智能清洁机器人已经可以通过机器人移动平台和平台移动轨道实现在不同组光伏板之间的位置转换,通过平台移动轨道上的供电光伏板实现对清洁机器人的供电,机器人移动平台在平台轨道上移动时还可通过自带的清洁装置对供电光伏板进行清洁。为了不影响平台移动轨道上的供电光伏板,机器人移动平台通常为框架结构,底部移动轮位于框架结构的底部边缘,与平台移动轨道之间的连接结构不够稳定,移动时容易受到清洁机器人移动、供电光伏板清洁等过程的干扰,进而导致移动轮脱轨、供电光伏板清洁错位、机器人移动平台与光伏板对接不紧密等问题。而且现有移动轮等移动结构的位置较为固定,拆装和维护较为不便,也无法适应不同尺寸的平台移动轨道,普适性不强。
技术实现思路
1、本说明书的实施例提供了一种光伏电站运维设备,旨在解决上述问题以及其他潜在的问题中的一个或多个。
2、为实现上述目的,提供以下技术方案:
3、本说明书提供了一种光伏电站运维设备,包括平台移动轨道和在所述平台移动轨道上移动的机器人移动平台;所述机器人移动平台用于承载清洁机器人并与所述平台移动轨道侧面的倾斜光伏板对接;所述机器人移动平台底部通过若干支撑轮架设在所述平台移动轨道上方,所述机器人移动平台底部还设有若干位置可调的侧边支撑轮组和下挂轮组,所述侧边支撑轮组和所述下挂轮组能分别在所述平台移动轨道的侧面和底面移动。
4、本说明书实施例的光伏电站运维设备,通过所述支撑轮、所述侧边支撑轮组和所述下挂轮组,将所述机器人移动平台支撑在所述平台移动轨道上移动,移动时所述平台移动轨道的上表面、侧面和底面分别收到所述支撑轮、所述侧边支撑轮组和所述下挂轮组的作用力,所述机器人移动平台不易晃动,保障所述机器人移动平台的移动稳定性;同时所述侧边支撑轮组和所述下挂轮组的位置可调,能实现对所述平台移动轨道的作用力大小的调整,也能灵活适应与不同尺寸的所述平台移动轨道的连接;安装时先将所述支撑轮对准所述平台移动轨道,将所述机器人移动平台支撑在所述平台移动轨道上,然后调整所述侧边支撑轮组和所述下挂轮组将它们压在所述平台轨道上,安装和拆卸更加灵活便捷。
5、在一些实施例中,所述侧边支撑轮组包括侧边支撑轮和l型连接件,所述l型连接件的第一支腿活动连接在所述机器人移动平台的底部支撑梁的上表面;所述侧边支撑轮连接在所述l型连接件的第二支腿上,在所述平台移动轨道侧面滚动。
6、在一些实施例中,所述l型连接件包括第一l型钢管和第二l型钢管,所述第一l型钢管的第二支腿与所述平台移动轨道侧面的距离大于所述第二l型钢管的第二支腿与所述平台移动轨道侧面的距离,所述第二l型钢管的第二支腿连接有支撑轮连接杆,所述支撑轮连接杆内侧面连接所述侧边支撑轮,所述支撑轮连接杆的外侧面通过第一弹性件连接所述第一l型钢管的第二支腿。
7、在一些实施例中,所述下挂轮组包括第三l型钢管和下挂轮,所述第三l型钢管的第一支腿活动连接在所述底部支撑梁的上表面;所述下挂轮连接在所述第三l型钢管的第二支腿上,在所述平台移动轨道底面滚动。
8、在一些实施例中,所述下挂轮和所述底部支撑梁之间设有第二弹性件。
9、在一些实施例中,所述侧边支撑轮组和所述下挂轮组数量相等。
10、在一些实施例中,所述第二弹性件一端与所述下挂轮连接,另一端连接在所述底部支撑梁上的所述l型连接件上。
11、在一些实施例中,所述机器人移动平台上表面远离倾斜光伏板的一侧设有止停架。
12、在一些实施例中,所述止停架包括相互垂直连接的竖杆和横杆,所述横杆设在所述机器人移动平台上表面的底边,所述竖杆与所述机器人移动平台上表面远离倾斜光伏板的侧边平行。
13、在一些实施例中,所述横杆上设有充电滑槽,用于使清洁机器人从倾斜光伏板移动到所述机器人移动平台后与所述充电滑槽卡合充电。
技术特征:
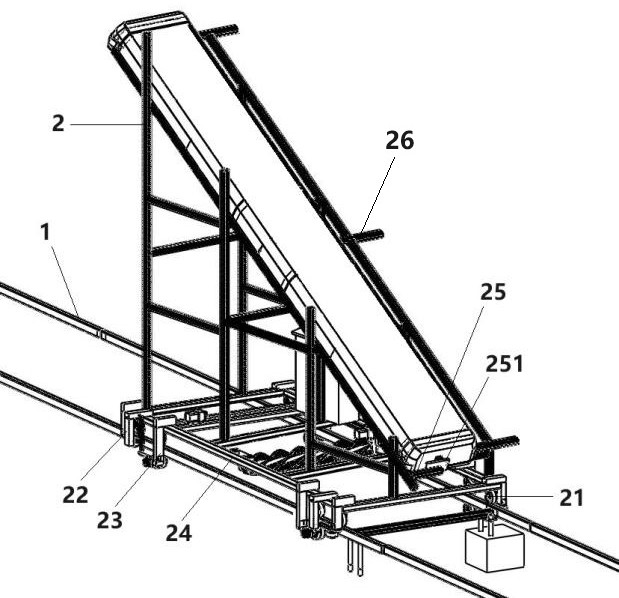
1.一种光伏电站运维设备,包括平台移动轨道(1)和在所述平台移动轨道(1)上移动的机器人移动平台(2);所述机器人移动平台(2)用于承载清洁机器人并与所述平台移动轨道(1)侧面的倾斜光伏板对接;其特征在于,所述机器人移动平台(2)底部通过若干支撑轮(21)架设在所述平台移动轨道(1)上方,所述机器人移动平台(2)底部还设有若干位置可调的侧边支撑轮组(22)和下挂轮组(23),所述侧边支撑轮组(22)和所述下挂轮组(23)能分别在所述平台移动轨道(1)的侧面和底面移动。
2.根据权利要求1所述的光伏电站运维设备,其特征在于,所述侧边支撑轮组(22)包括侧边支撑轮(221)和l型连接件,所述l型连接件的第一支腿活动连接在所述机器人移动平台(2)的底部支撑梁(24)的上表面;所述侧边支撑轮(221)连接在所述l型连接件的第二支腿上,在所述平台移动轨道(1)侧面滚动。
3.根据权利要求2所述的光伏电站运维设备,其特征在于,所述l型连接件包括第一l型钢管(223)和第二l型钢管(224),所述第一l型钢管(223)的第二支腿与所述平台移动轨道(1)侧面的距离大于所述第二l型钢管(224)的第二支腿与所述平台移动轨道(1)侧面的距离,所述第二l型钢管(224)的第二支腿连接有支撑轮连接杆(222),所述支撑轮连接杆(222)内侧面连接所述侧边支撑轮(221),所述支撑轮连接杆(222)的外侧面通过第一弹性件(31)连接所述第一l型钢管(223)的第二支腿。
4.根据权利要求2所述的光伏电站运维设备,其特征在于,所述下挂轮组(23)包括第三l型钢管(231)和下挂轮(232),所述第三l型钢管(231)的第一支腿活动连接在所述底部支撑梁(24)的上表面;所述下挂轮(232)连接在所述第三l型钢管(231)的第二支腿上,在所述平台移动轨道(1)底面滚动。
5.根据权利要求4所述的光伏电站运维设备,其特征在于,所述下挂轮(232)和所述底部支撑梁(24)之间设有第二弹性件(32)。
6.根据权利要求5所述的光伏电站运维设备,其特征在于,所述侧边支撑轮组(22)和所述下挂轮组(23)数量相等。
7.根据权利要求6所述的光伏电站运维设备,其特征在于,所述第二弹性件(32)一端与所述下挂轮(232)连接,另一端连接在所述底部支撑梁(24)上的所述l型连接件上。
8.根据权利要求1所述的光伏电站运维设备,其特征在于,所述机器人移动平台(2)上表面远离倾斜光伏板的一侧设有止停架(25)。
9.根据权利要求8所述的光伏电站运维设备,其特征在于,所述止停架(25)包括相互垂直连接的竖杆和横杆,所述横杆设在所述机器人移动平台上表面的底边,所述竖杆与所述机器人移动平台上表面远离倾斜光伏板的侧边平行。
10.根据权利要求9所述的光伏电站运维设备,其特征在于,所述横杆上设有充电滑槽(251),用于使清洁机器人从倾斜光伏板移动到所述机器人移动平台(2)后与所述充电滑槽(251)卡合充电。
技术总结
本说明书涉及光伏电池板清洁领域,涉及一种光伏电站运维设备,设备包括平台移动轨道和在所述平台移动轨道上移动的机器人移动平台;所述机器人移动平台用于承载清洁机器人并与所述平台移动轨道侧面的倾斜光伏板对接;所述机器人移动平台底部通过若干支撑轮架设在所述平台移动轨道上方,所述机器人移动平台底部还设有若干位置可调的侧边支撑轮组和下挂轮组,所述侧边支撑轮组和所述下挂轮组能分别在所述平台移动轨道的侧面和底面移动。本说明书中的机器人移动平台能适应不同尺寸的平台移动轨道,在所述平台移动轨道上的移动更加稳定灵活,有效保障对倾斜光伏板的清洁过程。
技术研发人员:崔慧生,王玉,段竣仁,范立夏,李嫚,陈少鹏
受保护的技术使用者:浙江克里蒂弗机器人科技有限公司
技术研发日:
技术公布日:2024/11/28
- 还没有人留言评论。精彩留言会获得点赞!