本发明属于磁悬浮平面电机,尤其涉及一种用于平面电机动子的海尔贝克阵列、动子和平面电机。
背景技术:
1、目前,磁悬浮平面电机通过磁场悬浮实现无接触、无磨损的平面运动。与传统的由直线导轨正交组合的平面运动结构相比,磁悬浮平面电机无需导轨支撑,机构简单,可实现轻量化,实现高速、高加速精密运动,在高精度光刻机等高速精密装备方面具有重要应用前景。
2、常见的动磁式平面电机中,动子磁体作为平面电机的关键组件之一,其结构设计对平面电机的性能至关重要,常见的设计包括单面和双面,以及海尔贝克阵列等。海尔贝克阵列通过精心布置磁体的磁化方向,能够在电机的一侧产生增强的磁场,而另一侧磁场几乎消失,从而提高了磁场利用率和电机效率。
3、但是,现有技术中的动子磁体的海尔贝克阵列中,各动子磁体间存在间隙,会导致磁通泄露,磁力线的集中度降低,磁场密度不足,进而影响电机的推力和精度。
技术实现思路
1、为了解决上述技术问题,本发明提供如下技术方案:
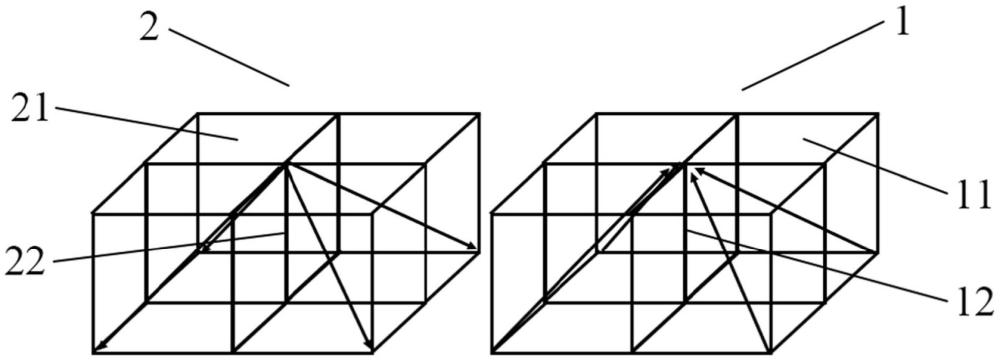
2、第一方面,本申请提供一种用于平面电机动子的海尔贝克阵列,包括第一磁体单元和第二磁体单元,所述第一磁体单元包括磁块一,磁块一呈长方体形状,充磁方向为长方体的体对角线方向,磁块一的数量为四个,四个磁块一呈田字型排列,存在第一相交线,四个磁块一的磁路起点均为第一相交线顶点,所述第二磁体单元包括磁块二,磁块二与磁块一的尺寸和数量相同,充磁方向也为长方体的体对角线方向,四个磁块二呈田字型排列,存在第二相交线,四个磁块二的磁路终点均为第二相交线顶点,两个第一磁体单元和两个第二磁体单元分别交叉设置呈田字型排列,形成一个海尔贝克阵列。
3、在上述技术方案基础上,所述磁块一和磁块二的长度尺寸等于宽度尺寸。
4、在上述技术方案基础上,所述磁块一和磁块二的充磁方向为长度方向偏宽度方向45°,且偏高度方向θ。
5、在上述技术方案基础上,0<θ<90°。
6、在上述技术方案基础上,所述磁块一和磁块二的充磁方向为长度正方向偏宽度正方向45°,且偏高度正方向θ。
7、在上述技术方案基础上,所述磁块一和磁块二均呈正方体形状。
8、在上述技术方案基础上,所述磁块一和磁块二的充磁方向为长度方向偏宽度方向45°,且偏高度方向45°。
9、在上述技术方案基础上,所述磁块一和磁块二的充磁方向为长度正方向偏宽度正方向45°,且偏高度正方向45°。
10、第二方面,本申请提供一种动子,包括如上述实施例中任一项所述的用于平面电机动子的海尔贝克阵列。
11、第三方面,本申请提供一种平面电机,包括如上述实施例所述的动子。
12、与相关技术相比,本发明的有益效果如下:
13、1、本发明通过设置四个呈田字型排列的磁块一组成第一磁体单元,四个呈田字型排列的磁块二组成第二磁体单元,磁块一和磁块二的充磁方向均为长方体的体对角线方向,将现有技术的一维海尔贝克阵列磁体磁路方向通过二维矢量合成,改进为三维磁路方向,第一磁体单元和第二磁体单元呈田字型组合成一个海尔贝克阵列,相比于现有技术,能够减少磁块之间的间隙,提高整体的磁场密度,在相同面积的情况下,磁场强度大于现有技术。
14、2、本发明中磁块一和磁块二的充磁方向均为长方体的体对角线方向,能够简化磁块一和磁块二充磁过程,这相当于是整个海尔贝克阵列中只需要一种充磁方向的磁块,充磁后的磁块一和磁块二只需要调整装配方向即可完成装配。
15、3、本发明采用上述海尔贝克阵列应用于平面电机动子,能够减轻动子的重量,在提供相同的磁场强度的情况下,动子的重量小于现有技术。
技术特征:1.一种用于平面电机动子的海尔贝克阵列,其特征在于,包括第一磁体单元和第二磁体单元,所述第一磁体单元包括磁块一,磁块一呈长方体形状,充磁方向为长方体的体对角线方向,磁块一的数量为四个,四个磁块一呈田字型排列,存在第一相交线,四个磁块一的磁路起点均为第一相交线顶点,所述第二磁体单元包括磁块二,磁块二与磁块一的尺寸和数量相同,充磁方向也为长方体的体对角线方向,四个磁块二呈田字型排列,存在第二相交线,四个磁块二的磁路终点均为第二相交线顶点,两个第一磁体单元和两个第二磁体单元分别交叉设置呈田字型排列,形成一个海尔贝克阵列。
2.根据权利要求1所述的用于平面电机动子的海尔贝克阵列,其特征在于,所述磁块一和磁块二的长度尺寸等于宽度尺寸。
3.根据权利要求2所述的用于平面电机动子的海尔贝克阵列,其特征在于,所述磁块一和磁块二的充磁方向为长度方向偏宽度方向45°,且偏高度方向θ。
4.根据权利要求3所述的用于平面电机动子的海尔贝克阵列,其特征在于,0<θ<90°。
5.根据权利要求4所述的用于平面电机动子的海尔贝克阵列,其特征在于,所述磁块一和磁块二的充磁方向为长度正方向偏宽度正方向45°,且偏高度正方向θ。
6.根据权利要求1所述的用于平面电机动子的海尔贝克阵列,其特征在于,所述磁块一和磁块二均呈正方体形状。
7.根据权利要求6所述的用于平面电机动子的海尔贝克阵列,其特征在于,所述磁块一和磁块二的充磁方向为长度方向偏宽度方向45°,且偏高度方向45°。
8.根据权利要求7所述的用于平面电机动子的海尔贝克阵列,其特征在于,所述磁块一和磁块二的充磁方向为长度正方向偏宽度正方向45°,且偏高度正方向45°。
9.一种动子,其特征在于,包括如权利要求1至8中任一项所述的用于平面电机动子的海尔贝克阵列。
10.一种平面电机,其特征在于,包括如权利要求9所述的动子。
技术总结本发明涉及磁悬浮平面电机技术领域,提供了一种用于平面电机动子的海尔贝克阵列,包括第一磁体单元和第二磁体单元,所述第一磁体单元包括磁块一,磁块一呈长方体形状,充磁方向为长方体的体对角线方向,磁块一的数量为四个,四个磁块一呈田字型排列,存在第一相交线,四个磁块一的磁路起点均为第一相交线顶点,所述第二磁体单元包括磁块二,磁块二与磁块一的尺寸和数量相同,充磁方向也为长方体的体对角线方向,四个磁块二呈田字型排列,存在第二相交线,四个磁块二的磁路终点均为第二相交线顶点,两个第一磁体单元和两个第二磁体单元分别交叉设置呈田字型排列,形成一个海尔贝克阵列。本申请还公开一种动子和平面电机。
技术研发人员:黄安杰,李元隆,梁俊朗,霍炜彬,宋凯,柯振中,林志浩,张小倩,杨裕基
受保护的技术使用者:佛山市增广智能科技有限公司
技术研发日:技术公布日:2024/11/21