一种发动机伺服控制单元冗余驱动方法与流程
本申请涉及发动机推力及混合比调节控制,特别涉及一种发动机伺服控制单元冗余驱动方法。
背景技术:
1、双冗余伺服控制单元用于实现发动机推力及混合比调节,接收并识别控制指令,采集传感器信号,完成调节器伺服机组和节流阀伺服机组的角度闭环控制,在液体火箭发动机系统具有重要作用。当双冗余伺服控制单元进行驱动切换的瞬间,伺服电机实测转速在转速设定值基础上会出现300至500rpm的超调,可能会触发电机超速保护策略,pwm输出停止,驱动电路使能禁止,制动器抱闸,电机开关关闭;之后电机在制动器作用下惯性减速,即机组自由减速,不再受伺服控制单元控制,导致机组角度未调节至发动机要求工况,从而影响了发动机试车的成败。因此需对发动机伺服控制单元驱动冗余方法进行研究。
2、现有技术中,中国专利cn115680939a公开了一种伺服机组无扰动冗余控制系统,包括控制电路cpua、控制电路cpub、切机仲裁电路、输出使能电路a和输出使能电路b电路;控制电路cpua和控制电路cpub根据机组的工作情况输出机组控制信号分别给输出使能电路a和输出使能电路b;切机仲裁电路根据控制电路cpua和控制电路cpub的自检信号判断是哪路控制信号当班,并将判断结果输出给输出使能电路a或输出使能电路b;输出使能电路a或输出使能电路b使能驱动机组工作。
3、然而,上述现有技术并未考虑驱动切换的瞬间伺服电机转速超调的情况,驱动控制稳定性较差,发动机推力及混合比调节的可靠性较差。
技术实现思路
1、本申请提供了一种发动机伺服控制单元冗余驱动方法,用以解决现有技术未考虑驱动切换的瞬间伺服电机转速超调的情况,驱动控制稳定性较差,发动机推力及混合比调节的可靠性较差的问题。
2、一方面,本申请提供了一种发动机伺服控制单元冗余驱动方法,包括以下步骤:
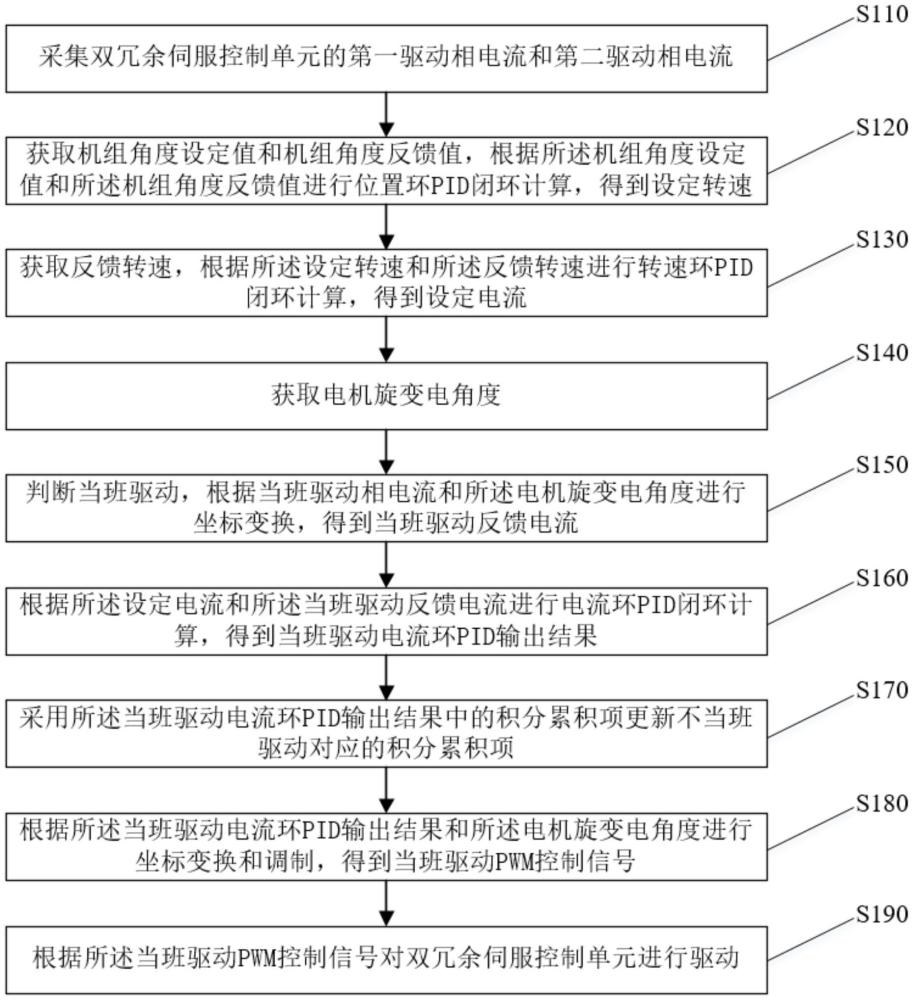
3、采集双冗余伺服控制单元的第一驱动相电流和第二驱动相电流。
4、获取机组角度设定值和机组角度反馈值,根据所述机组角度设定值和所述机组角度反馈值进行位置环pid闭环计算,得到设定转速。
5、获取反馈转速,根据所述设定转速和所述反馈转速进行转速环pid闭环计算,得到设定电流。
6、获取电机旋变电角度。
7、判断当班驱动,根据当班驱动相电流和所述电机旋变电角度进行坐标变换,得到当班驱动反馈电流。
8、根据所述设定电流和所述当班驱动反馈电流进行电流环pid闭环计算,得到当班驱动电流环pid输出结果。
9、采用所述当班驱动电流环pid输出结果中的积分累积项更新不当班驱动对应的积分累积项。
10、根据所述当班驱动电流环pid输出结果和所述电机旋变电角度进行坐标变换和调制,得到当班驱动pwm控制信号。
11、根据所述当班驱动pwm控制信号对双冗余伺服控制单元进行驱动。
12、在一种可能的实现方式中,所述获取机组角度设定值和机组角度反馈值包括:
13、获取角度调节指令,根据所述角度调节指令更新所述机组角度设定值。
14、读取机组旋变当前码值,将所述机组旋变当前码值转换为角度值,作为所述机组角度反馈值。
15、在一种可能的实现方式中,所述获取反馈转速包括:
16、读取电机旋变当前码值,将所述电机旋变当前码值转换为转速值,作为所述反馈转速。
17、在一种可能的实现方式中,所述获取电机旋变电角度包括:
18、读取电机旋变机械角度,将所述电机旋变机械角度转换为电角度,作为所述电机旋变电角度。
19、在一种可能的实现方式中,若所述当班驱动为第一驱动,将所述第一驱动相电流作为所述当班驱动相电流。
20、若所述当班驱动为第二驱动,将所述第二驱动相电流作为所述当班驱动相电流。
21、在一种可能的实现方式中,所述根据当班驱动相电流和所述电机旋变电角度进行坐标变换,得到当班驱动反馈电流包括:
22、根据所述当班驱动相电流和所述电机旋变电角度进行clark坐标变换和park坐标变换,得到两相旋转电流,作为当班驱动反馈电流。
23、所述当班驱动反馈电流包括:当班驱动q轴反馈电流和当班驱动d轴反馈电流。
24、在一种可能的实现方式中,所述根据所述设定电流和所述当班驱动反馈电流进行电流环pid闭环计算,得到当班驱动电流环pid输出结果包括:
25、根据所述设定电流和所述当班驱动q轴反馈电流进行电流环q轴pid闭环计算,得到当班驱动电流环q轴pid输出结果。
26、根据所述设定电流和所述当班驱动d轴反馈电流进行电流环d轴pid闭环计算,得到当班驱动电流环d轴pid输出结果。
27、在一种可能的实现方式中,所述采用所述当班驱动电流环pid输出结果中的积分累积项更新不当班驱动对应的积分累积项包括:
28、采用所述当班驱动电流环q轴pid输出结果中的q轴pid积分累积项更新不当班驱动对应的q轴pid积分累积项。
29、采用所述当班驱动电流环d轴pid输出结果中的d轴pid积分累积项更新不当班驱动对应的d轴pid积分累积项。
30、在一种可能的实现方式中,所述根据所述当班驱动电流环pid输出结果和所述电机旋变电角度进行坐标变换和调制,得到当班驱动pwm控制信号包括:
31、根据所述当班驱动电流环q轴pid输出结果、所述当班驱动电流环d轴pid输出结果和所述电机旋变电角度进行park逆坐标变换和空间矢量脉宽调制,得到当班驱动pwm控制信号。
32、本申请中的一种发动机伺服控制单元冗余驱动方法,具有以下优点:
33、通过采用当班驱动电流环pid输出结果中的积分累积项更新不当班驱动对应的积分累积项,使得在驱动切换时,积分累积项能够稳定衔接过渡,提高了驱动控制稳定性,提高了发动机推力及混合比调节的可靠性。
34、提出的读取电机旋变机械角度,将电机旋变机械角度转换为电角度,作为电机旋变电角度,便在旋转坐标系下进行坐标变换,提高了精确的转矩和速度控制。
35、提出的根据当班驱动相电流和电机旋变电角度进行clark坐标变换和park坐标变换,得到两相旋转电流,作为当班驱动反馈电流,便于在旋转坐标系下进行电流环pid闭环计算。
36、提出的根据当班驱动电流环q轴pid输出结果、当班驱动电流环d轴pid输出结果和电机旋变电角度进行park逆坐标变换和空间矢量脉宽调制,得到当班驱动pwm控制信号,实现了对电机的精确控制。
技术特征:
1.一种发动机伺服控制单元冗余驱动方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,所述获取机组角度设定值和机组角度反馈值包括:
3.根据权利要求1所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,所述获取反馈转速包括:
4.根据权利要求1所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,所述获取电机旋变电角度包括:
5.根据权利要求1所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,若所述当班驱动为第一驱动,将所述第一驱动相电流作为所述当班驱动相电流;
6.根据权利要求1所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,所述根据当班驱动相电流和所述电机旋变电角度进行坐标变换,得到当班驱动反馈电流包括:
7.根据权利要求6所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,所述根据所述设定电流和所述当班驱动反馈电流进行电流环pid闭环计算,得到当班驱动电流环pid输出结果包括:
8.根据权利要求7所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,所述采用所述当班驱动电流环pid输出结果中的积分累积项更新不当班驱动对应的积分累积项包括:
9.根据权利要求7所述的一种发动机伺服控制单元冗余驱动方法,其特征在于,所述根据所述当班驱动电流环pid输出结果和所述电机旋变电角度进行坐标变换和调制,得到当班驱动pwm控制信号包括:
技术总结
本发明公开了一种发动机伺服控制单元冗余驱动方法,包括以下步骤:采集相电流;进行位置环PID闭环计算;进行转速环PID闭环计算;根据当班驱动相电流和电机旋变电角度进行坐标变换;进行电流环PID闭环计算;采用当班驱动电流环PID输出结果中的积分累积项更新不当班驱动对应的积分累积项;根据当班驱动电流环PID输出结果和电机旋变电角度得到当班驱动PWM控制信号。本申请通过采用当班驱动电流环PID输出结果中的积分累积项更新不当班驱动对应的积分累积项,使得在驱动切换时,积分累积项能够稳定衔接过渡,提高了驱动控制稳定性,提高了发动机推力及混合比调节的可靠性。
技术研发人员:徐漫飞,李伟,孙海智,于洋,钟恒,康广庆,李萌
受保护的技术使用者:西安航天远征流体控制股份有限公司
技术研发日:
技术公布日:2025/1/23
- 还没有人留言评论。精彩留言会获得点赞!