一种基于准谐振的柔性伺服系统机械谐振抑制方法及其抑制系统
本发明属于电机控制相关,更具体地,涉及一种基于准谐振的柔性伺服系统机械谐振抑制方法及其抑制系统。
背景技术:
1、伺服驱动系统的机械传动部分经常使用传动轴、变速器、联轴器等传动装置连接电机和负载,而实际传动装置并不是理想刚体,存在一定的弹性,通常会在系统中引发机械谐振。机械振荡除了会发出声学噪声形成噪声污染外,还会对机械传动装置造成严重的损害,影响其使用寿命;另外,还会引发控制系统中的控制量振荡,使得闭环控制的稳定性以及可调整性受到制约。因此,机械振荡的研究以及抑制方法是非常有必要的。
2、目前,针对机械谐振抑制问题的解决方法主要分为两方面:被动抑制方式以及主动抑制方式。主动抑制方式是指通过改变控制器结构或调整控制参数来对机械振动进行抑制。常见的方法是通过常规控制器结合状态反馈实现振动抑制,这种方法不会对指令分量产生削弱效果。目前商用伺服产品中,常用扩张状态观测器来实现主动抑制机械谐振,但是,针对观测器抑制机械谐振的方法,会损失了环路的相位裕度,从而引起系统超调,这时,可通过降低速度环路增益来降低系统超调,但却会使得系统响应速度变慢。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种基于准谐振的柔性伺服系统机械谐振抑制方法及其抑制系统,其目的在于实现主动抑制机械谐振的同时,减小系统响应超调,并提升响应速度。
2、为实现上述目的,本发明提供了一种基于准谐振的柔性伺服系统机械谐振抑制方法,其包括:
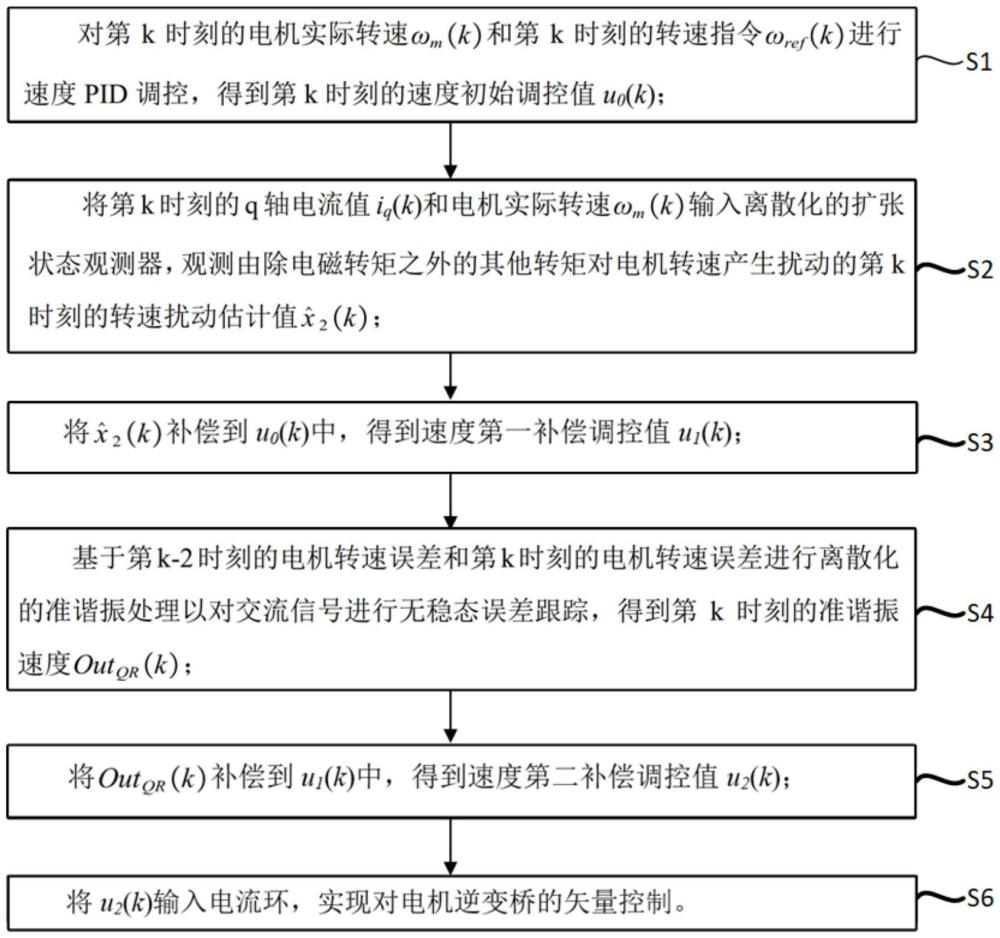
3、对第k时刻的电机实际转速ωm(k)和第k时刻的转速指令ωref(k)进行速度pid调控,得到第k时刻的速度初始调控值u0(k);
4、将第k时刻的q轴电流值iq(k)和电机实际转速ωm(k)输入离散化的扩张状态观测器,观测由除电磁转矩之外的其他转矩对电机转速产生扰动的第k时刻的转速扰动估计值
5、将补偿到u0(k)中,得到速度第一补偿调控值u1(k);
6、基于第k-2时刻的电机转速误差和第k时刻的电机转速误差进行离散化的准谐振处理以对交流信号进行无稳态误差跟踪,得到第k时刻的准谐振速度outqr(k);
7、将outqr(k)补偿到u1(k)中,得到速度第二补偿调控值u2(k);
8、将u2(k)输入电流环,实现对电机逆变桥的矢量控制。
9、在一些实施例中,所述pid调控采用kp调控,所述进行速度pid调控,得到第k时刻的速度初始调控值u0(k)的调控公式为:
10、u0(k)=kp(ωref(k)-ωm(k))。
11、式中,kp为比例增益系数。
12、在一些实施例中,所述离散化的扩张状态观测器的等效模型为:
13、
14、式中,为第k时刻的转速估计值,为第k-1时刻的转速估计值,为第k-1时刻的转速扰动估计值;
15、ts为采样周期,k1和k2为扩张状态观测器的增益系数,b为电机转矩常数与电机惯量的比值。
16、在一些实施例中,所述进行离散化的准谐振处理的方程为:
17、
18、式中,e为电机转速误差,b0、b2、a0、a1、a2均为根据系统参数计算所得的常数,ts为采样周期,kr、ωc、ωn分别为准谐振的深度系数、宽度系数以及谐振频率,谐振频率ωn等于柔性伺服系统中的等效双惯量模型的反谐振频率。
19、在一些实施例中,所述柔性伺服系统的等效双惯量模型为:
20、
21、式中,te为电机电磁转矩,ωm、ωl为分别为电机实际转速和负载实际转速,jm、jl分别为电机惯量和负载惯量,ks和ds分别为负载弹性系数和阻尼系数,s为拉普拉斯算子。
22、在一些实施例中,所述将补偿到u0(k)中,得到速度第一补偿调控值u1(k)的计算公式为:
23、
24、式中,b为电机转矩常数与电机惯量的比值。
25、本发明还提供了一种基于准谐振的柔性伺服系统机械谐振抑制系统,其包括:
26、速度pid调控模块,用于对第k时刻的电机实际转速ωm(k)和第k时刻的转速指令ωref(k)进行速度pid调控,得到第k时刻的速度初始调控值u0(k);
27、扩张状态观测器,用于获取第k时刻的q轴电流值iq(k)和电机实际转速ωm(k)并观测由除电磁转矩之外的其他转矩对电机转速产生扰动的第k时刻的转速扰动估计值
28、第一补偿运算模块,用于将补偿到u0(k)中,得到速度第一补偿调控值u1(k);
29、准谐振环节模块,用于获取第k-2时刻的电机转速误差和第k时刻的电机转速误差并进行离散化的准谐振处理以对交流信号进行无稳态误差跟踪,得到第k时刻的准谐振速度outqr(k);
30、第二补偿运算模块,用于将outqr(k)补偿到u1(k)中,得到速度第二补偿调控值u2(k);
31、电流环,用于获取速度第二补偿调控值u2(k),实现对电机逆变桥的矢量控制。
32、本发明还提供了一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,其中,所述处理器执行所述计算机程序时实现如上任一顶所述的方法的步骤。
33、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现如上任一项所述的方法的步骤。
34、本发明还提供了一种计算机程序产品,包括计算机程序或指令,其中,所述计算机程序或指令被处理器执行时实现如上任一项所述的方法的步骤。
35、总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明主要具有以下有益效果:
36、首先,本发明将除电机电磁转矩之外其他影响电机转速的转矩视为扰动,并设计扩张状态观测器来观测其他转矩f的对电机转速的扰动估计值,基于所观测的扰动值对速度初始调控值进行补偿,可以实现对机械谐振的主动抑制,相比于传统pi算法,增加扩张状态观测器能够抑制谐振给系统转速带来的影响,并且稳态时,相比于传统pi算法,能够抑制外部扰动带来的转速波动,例如齿槽带来的影响。其次,由于发现加入扩张状态观测器会使得系统的相位裕度降低,产生大幅度超调,因此,本发明还引入准谐振处理以提高信号谐振频率处的幅值,从而提高系统相位裕度,减小由扩张状态观测器带来的系统超调,并且在实现相同超调情况下,加入谐振环节的系统响应速度更快。
技术特征:
1.一种基于准谐振的柔性伺服系统机械谐振抑制方法,其特征在于,包括:
2.如权利要求1所述的基于准谐振的柔性伺服系统机械谐振抑制方法,其特征在于,所述pid调控采用kp调控,所述进行速度pid调控,得到第k时刻的速度初始调控值u0(k)的调控公式为:
3.如权利要求1所述的基于准谐振的柔性伺服系统机械谐振抑制方法,其特征在于,所述离散化的扩张状态观测器的等效模型为:
4.如权利要求1所述的基于准谐振的柔性伺服系统机械谐振抑制方法,其特征在于,所述进行离散化的准谐振处理的方程为:
5.如权利要求1所述的基于准谐振的柔性伺服系统机械谐振抑制方法,其特征在于,所述柔性伺服系统的等效双惯量模型为:
6.如权利要求1所述的基于准谐振的柔性伺服系统机械谐振抑制方法,其特征在于,所述将补偿到u0(k)中,得到速度第一补偿调控值u1(k)的计算公式为:
7.一种基于准谐振的柔性伺服系统机械谐振抑制系统,其特征在于,包括:
8.一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序或指令,其特征在于,所述计算机程序或指令被处理器执行时实现如权利要求1至7任一项所述的方法的步骤。
技术总结
本发明属于电机控制相关技术领域,其公开了一种基于准谐振的柔性伺服系统机械谐振抑制方法及其抑制系统,方法包括:对第k时刻的电机实际转速ω<subgt;m</subgt;(k)和转速指令ω<subgt;ref</subgt;(k)进行速度PID调控,得到速度初始调控值u<subgt;0</subgt;(k);将第k时刻的q轴电流值i<subgt;q</subgt;(k)和ω<subgt;m</subgt;(k)输入离散化的扩张状态观测器,观测转速扰动估计值并补偿到u<subgt;0</subgt;(k)中,得到u<subgt;1</subgt;(k);基于第k‑2时刻和第k时刻的电机转速误差进行离散化的准谐振处理,得到Out<subgt;QR</subgt;(k)并补偿到u<subgt;1</subgt;(k)中,得到u<subgt;2</subgt;(k)并输入电流环,实现对电机逆变桥的矢量控制。通过上述方法,可以实现主动抑制机械谐振的同时,减小系统响应超调,并提升响应速度。
技术研发人员:许强,饶俊杰,徐佳琦
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2025/1/2
- 还没有人留言评论。精彩留言会获得点赞!