一种机器人充电装置及巡检机器人的制作方法
本发明涉及自主充电,具体为一种机器人充电装置及巡检机器人。
背景技术:
1、四足机器人也被称为机器狗,是机器人领域中的一种重要类型,其模仿自然界中四足动物的运动方式,具备步行、跑步、跳跃等多种运动能力,可以根据具体任务和环境进行灵活调整。为了提高四足机器人的自主性、增强工作效率以及适应多样化场景,目前一般都会在合适的位置设置无线充电桩,以便于四足机器人进行自主充电。
2、专利授权公告号为cn208337219u的专利公开了一种机器人用的无线充电桩,其主要包括:外壳,外壳为柱状腔体结构,并且外壳任意一侧的外壁设有第一功能区;送电线圈,送电线圈覆盖设置在第一功能区外部表面;充电电路,充电电路通过支架连接固定在外壳内部,并通过设置在第一功能区覆盖有送电线圈部位的贯通孔与送电线圈电性连接;受电线圈,受电线圈连接设置在机器的机身外部表面,并且受电线圈高度位置与送电线圈高度位置一致;受电线圈与机器人的电源管理单元连接。
3、虽然上述专利中的无线充电桩能够为机器人提供引航功能,使得机器人可自主完成充电任务,但是其仍存在一定的缺陷:
4、由于轮式机器人上的受电线圈位于轮式机器人的侧边,而四足机器人上的受电线圈则位于四足机器人的底部,因此,虽然相同品牌或国家的轮式机器人和四足机器人均采用统一标准(如qi标准)进行无线充电,使得无线充电桩在理论上能够对轮式机器人和四足机器人进行无线充电,但是由于轮式机器人和四足机器人上受电线圈位置的不同,这使得不同的机器人需要配备与之相对应的无线充电桩,这样不仅会增加成本占用较多的空间,还会增加操作的复杂性和出错的可能性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种机器人充电装置及巡检机器人,以解决背景技术提出的问题,使充电装置能够同时适用于轮式机器人和四足机器人。
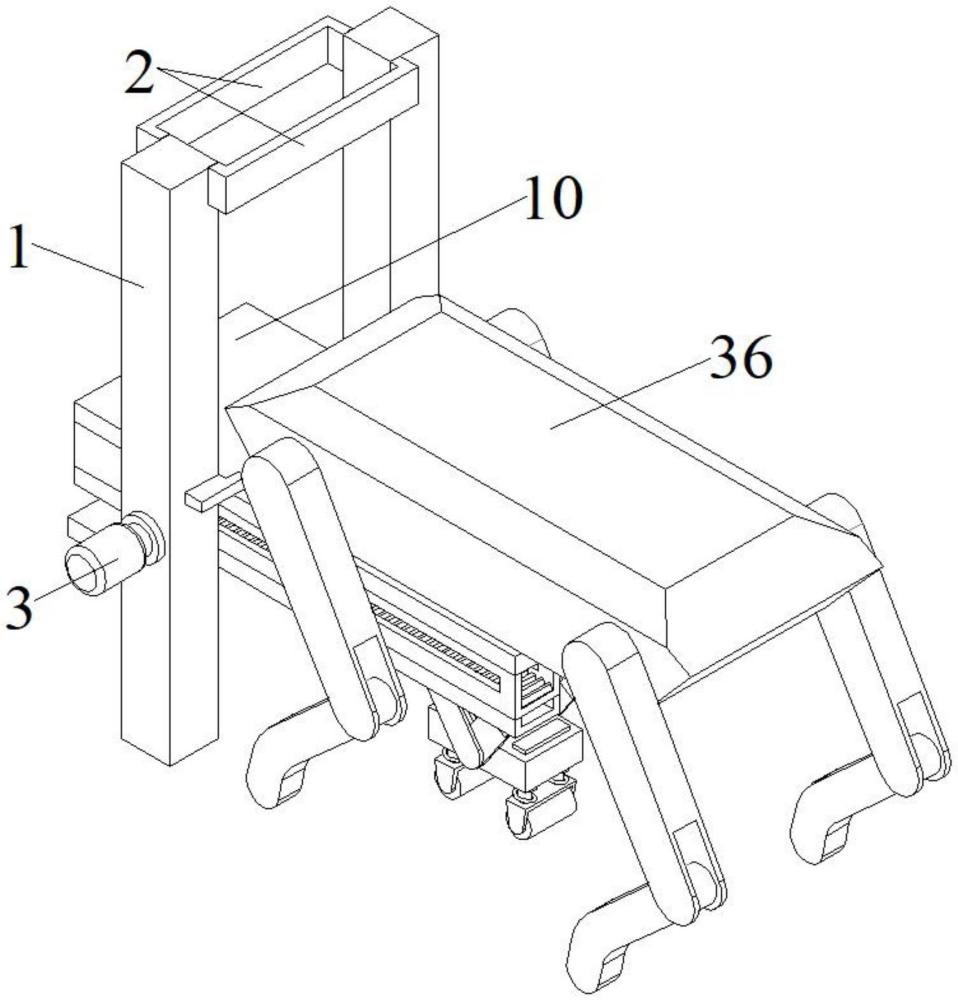
2、为实现上述的目的,本发明提供如下技术方案:一种机器人充电装置,包括充电桩外框,所述充电桩外框的一侧固接有电机,充电桩外框的中间位置转动连接有转轴,电机的输出端与转轴的一端固接,转轴的两端均固接有齿轮,充电桩外框的内侧连接有充电桩安装板,充电桩安装板前侧的下端固接有送电线圈,充电桩安装板背部的两侧均固接有与齿轮相匹配的移动框,移动框的两侧均开设有转轴相匹配的滑槽,移动框的内侧固接有多个与齿轮相匹配的齿块,充电桩外框前端的两侧均固接有前侧限位块,充电桩外框后端的两侧均固接有后侧限位块,后侧限位块的水平高度小于前侧限位块的水平高度。
3、进一步地,所述移动框远离充电桩安装板的一侧固接有限位框,限位框的中间位置固接有插槽,限位框的一端开设有与插槽相连通的定位槽,后侧限位块远离充电桩外框的一侧固接有与定位槽相匹配的定位块。
4、进一步地,所述定位块为t型设置,定位块上端的两侧均转动连接有辊筒。
5、进一步地,所述充电桩安装板的底部开设有限位槽,限位槽的内部滑动连接有限位滑块,限位滑块底部的两端均铰接有第一铰接板,第一铰接板的下端铰接有第二铰接板,第二铰接板的上端铰接有铰接块,铰接块的顶部与充电桩安装板的底部固接,第一铰接板的下端固接有连接轴,连接轴的外部转动连接有支撑块,支撑块的中间位置开设有与连接轴相匹配的连接孔。
6、进一步地,所述支撑块的两端均滑动连接有定位杆,定位杆的底部固接有连接板,连接板的内侧转动连接有滚轮,定位杆的顶部固接有防脱板,定位杆的下端套设有支撑弹性件,支撑弹性件的上端与支撑块固接,支撑弹性件的下端与连接板固接。
7、进一步地,所述限位滑块的中间位置滑动连接有定位柱,定位柱远离铰接块的一端套设有复位弹性件,复位弹性件的一端与限位槽的端部固接,复位弹性件的另一端与限位滑块固接。
8、进一步地,所述充电桩安装板底部远离铰接块的一端固接有液压仓,液压仓的下端滑动连接有主动活塞,主动活塞靠近铰接块的一端与转轴相抵,液压仓的上端滑动连接有传动活塞,传动活塞靠近铰接块的一端与限位滑块固接。
9、进一步地,所述充电桩外框上端的两侧均固接有限位板。
10、本发明还提供一种巡检机器人,包括机器人主体,机器人主体的底部安装有受电线圈,机器人主体通过受电线圈与上述机器人充电装置相匹配。
11、与现有技术对比,本发明具备以下有益效果:
12、1、该种机器人充电装置及巡检机器人,轮式机器人在充电时只需要停靠在充电桩外框前侧即可,而当四足机器人需要进行充电时,机器人主体先停靠在充电桩外框前侧,充电桩外框检测到机器人主体后会自行启动,使充电桩安装板转动水平状态,并移动时机器人主体的底部,进而让充电桩安装板上的送电线圈与机器人主体底部的受电线圈对齐,接着就能对四足机器人进行无线充电,使充电装置整体既能用于轮式机器人又能用于四足机器人,使得不同的机器人可用同一种充电装置进行无线充电,减少充电装置所需的种类,降低操作的复杂性和出错的可能性;
13、2、该种机器人充电装置及巡检机器人,在对四足机器人进行充电时,充电桩安装板会在转动至水平状态后向四足机器人的底部进行移动,而在移动过程中,第一铰接板、第二铰接板以及支撑块会展开,并通过滚轮与地面接触,从而为充电桩安装板提供支撑,避免充电桩安装板远离充电桩外框的一端发生下垂损坏;
14、3、该种机器人充电装置及巡检机器人,闲置时充电桩安装板上送电线圈与地面的距离较短(即送电线圈的初始高度较低),若轮式机器人上受电线圈的高度较高,导致送电线圈难以与受电线圈对齐进行无线充电,则可以启动电机,并让电机顺时针转动,电机会通过转轴带动齿轮一起进行顺时针转动,齿轮则会拨动齿块向上移动,从而改变充电桩安装板上送电线圈与地面的距离。
技术特征:
1.一种机器人充电装置,包括充电桩外框(1),其特征在于,所述充电桩外框(1)的一侧固接有电机(3),充电桩外框(1)的中间位置转动连接有转轴(4),电机(3)的输出端与转轴(4)的一端固接,转轴(4)的两端均固接有齿轮(5),充电桩外框(1)的内侧连接有充电桩安装板(10),充电桩安装板(10)前侧的下端固接有送电线圈(11),充电桩安装板(10)背部的两侧均固接有与齿轮(5)相匹配的移动框(12),移动框(12)的两侧均开设有转轴(4)相匹配的滑槽(13),移动框(12)的内侧固接有多个与齿轮(5)相匹配的齿块(14),充电桩外框(1)前端的两侧均固接有前侧限位块(6),充电桩外框(1)后端的两侧均固接有后侧限位块(7),后侧限位块(7)的水平高度小于前侧限位块(6)的水平高度。
2.根据权利要求1所述的一种机器人充电装置,其特征在于,所述移动框(12)远离充电桩安装板(10)的一侧固接有限位框(15),限位框(15)的中间位置固接有插槽(16),限位框(15)的一端开设有与插槽(16)相连通的定位槽(17),后侧限位块(7)远离充电桩外框(1)的一侧固接有与定位槽(17)相匹配的定位块(8)。
3.根据权利要求2所述的一种机器人充电装置,其特征在于,所述定位块(8)为t型设置,定位块(8)上端的两侧均转动连接有辊筒(9)。
4.根据权利要求1、2或3所述的一种机器人充电装置,其特征在于,所述充电桩安装板(10)的底部开设有限位槽(18),限位槽(18)的内部滑动连接有限位滑块(20),限位滑块(20)底部的两端均铰接有第一铰接板(22),第一铰接板(22)的下端铰接有第二铰接板(23),第二铰接板(23)的上端铰接有铰接块(24),铰接块(24)的顶部与充电桩安装板(10)的底部固接,第一铰接板(22)的下端固接有连接轴(25),连接轴(25)的外部转动连接有支撑块(26),支撑块(26)的中间位置开设有与连接轴(25)相匹配的连接孔(27)。
5.根据权利要求4所述的一种机器人充电装置,其特征在于,所述支撑块(26)的两端均滑动连接有定位杆(28),定位杆(28)的底部固接有连接板(30),连接板(30)的内侧转动连接有滚轮(32),定位杆(28)的顶部固接有防脱板(29),定位杆(28)的下端套设有支撑弹性件(31),支撑弹性件(31)的上端与支撑块(26)固接,支撑弹性件(31)的下端与连接板(30)固接。
6.根据权利要求4所述的一种机器人充电装置,其特征在于,所述限位滑块(20)的中间位置滑动连接有定位柱(19),定位柱(19)远离铰接块(24)的一端套设有复位弹性件(21),复位弹性件(21)的一端与限位槽(18)的端部固接,复位弹性件(21)的另一端与限位滑块(20)固接。
7.根据权利要求4或6所述的一种机器人充电装置,其特征在于,所述充电桩安装板(10)底部远离铰接块(24)的一端固接有液压仓(33),液压仓(33)的下端滑动连接有主动活塞(34),主动活塞(34)靠近铰接块(24)的一端与转轴(4)相抵,液压仓(33)的上端滑动连接有传动活塞(35),传动活塞(35)靠近铰接块(24)的一端与限位滑块(20)固接。
8.根据权利要求1、2、3、5或6所述的一种机器人充电装置,其特征在于,所述充电桩外框(1)上端的两侧均固接有限位板(2)。
9.一种巡检机器人,包括机器人主体(36),机器人主体(36)的底部安装有受电线圈(37),其特征在于,机器人主体(36)通过受电线圈(37)与权利要求1-8中任一项所述的机器人充电装置相匹配。
技术总结
本发明涉及自主充电技术领域,且公开了一种机器人充电装置及巡检机器人,包括充电桩外框,所述充电桩外框的一侧固接有电机,充电桩外框的中间位置转动连接有转轴,电机的输出端与转轴的一端固接,转轴的两端均固接有齿轮,充电桩外框的内侧连接有充电桩安装板,充电桩安装板前侧的下端固接有送电线圈,充电桩安装板背部的两侧均固接有与齿轮相匹配的移动框,移动框的两侧均开设有转轴相匹配的滑槽,移动框的内侧固接有多个与齿轮相匹配的齿块。该种机器人充电装置及巡检机器人,既能用于轮式机器人又能用于四足机器人,使得不同的机器人可用同一种充电装置进行无线充电,减少充电装置所需的种类,降低操作的复杂性和出错的可能性。
技术研发人员:朱冬,方向明,宋雯,唐国梅,张建,胡小东
受保护的技术使用者:七腾机器人有限公司
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!