一种抑制电动舵机瞬态电流的方法与流程
本发明属于电动舵机,具体涉及一种抑制电动舵机瞬态电流的方法。
背景技术:
1、电动舵机由电机提供驱动力矩,通过减速器增大输出扭矩,由于减速器的作用舵机工作电流往往较小,但是当舵机大角度变化时瞬间的启动电流会是额定工作电流的数倍,是空载工作电流的数十倍。这种瞬态电流特性容易瞬间拉低供电电源输出或损坏电机驱动电路的功率器件,造成产品故障或损坏。针对电动舵机瞬态电流过大的问题,目前往往采用电机驱动限流或其他硬件方式改善,但往往很难取得明显的效果或造成舵机速度和带宽等性能的明显下降。
技术实现思路
1、本发明的一个目的是提供一种抑制电动舵机瞬态电流的方法,能够解决现有技术中因电动舵机瞬态电流过大造成产品故障损坏的技术问题。
2、根据本发明的第一方面,提供了一种抑制电动舵机瞬态电流的方法,包括:
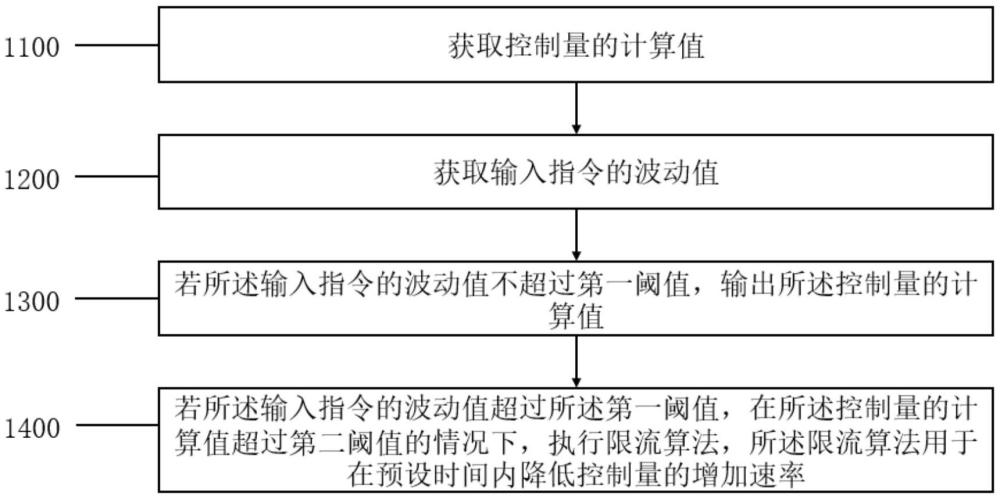
3、获取控制量的计算值,其中,所述控制量为电动舵机控制器收集位置指令和电动舵机输出轴位置反馈并通过伺服控制算法计算出的要输出给电机驱动的pwm控制量;
4、获取输入指令的波动值;
5、若所述输入指令的波动值不超过第一阈值,输出所述控制量的计算值;
6、若所述输入指令的波动值超过所述第一阈值,在所述控制量的计算值超过第二阈值的情况下,执行限流算法,所述限流算法用于在预设时间内降低控制量的增加速率,其中,所述第二阈值根据所述电动舵机的频率特性确定。
7、可选地,所述在所述控制量的计算值超过第二阈值的情况下,执行限流算法,包括:
8、获取上一次实际输出的控制量;
9、在所述上一次实际输出的控制量小于第三阈值的情况下,控制所述控制量以第一速率增加;
10、在所述上一次实际输出的控制量大于或等于所述第三阈值的情况下,控制所述控制量以第二速率增加;
11、其中,所述第二速率大于所述第一速率,所述第三阈值大于所述第二阈值。
12、可选地,在所述上一次实际输出的控制量小于第三阈值的情况下,根据下述公式计算本次输出的控制量:
13、uout=uoutpre+r1*(ua-α);
14、其中,uout为本次输出的控制量,uoutpre为上一次输出的控制量,r1为第一增长系数,ua为控制量的计算值,α为第二阈值。
15、可选地,在所述上一次实际输出的控制量大于或等于所述第三阈值的情况下,根据下述公式计算本次输出的控制量:
16、uout=uoutpre+r2;
17、其中,uout为本次输出的控制量,uoutpre为上一次输出的控制量,r2为第二增长系数。
18、可选地,所述第一增长系数和所述第二增长系数通过以下方式确定:
19、获取电动舵机的启动时间以及限流目标;
20、根据所述电动舵机的启动时间确定所述电动舵机的电流增大到所述限流目标的第一时间以及所述电动舵机的电流从所述限流目标降低到正常电流的第二时间;
21、根据所述第一时间和所述第二时间确定所述第一增长系数和所述第二增长系数。
22、可选地,所述第二阈值通过以下方式确定:
23、根据所述电动舵机的频率特性向电动舵机施加相应的指令;
24、获取所述电动舵机的控制量的最大观测值;
25、根据所述电动舵机的控制量的最大观测值确定所述第二阈值,其中,所述第二阈值大于所述电动舵机的控制量的最大观测值。
26、根据本发明的第二方面,提供了一种电子设备,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如本发明第一方面所述的一种抑制电动舵机瞬态电流的方法的步骤。
27、根据本发明的第三方面,提供了一种电动舵机,包括本发明第二方面所述的电子设备。
28、根据本发明的第四方面,提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如本发明第一方面所述的一种抑制电动舵机瞬态电流的方法的步骤。
29、本发明的有益效果在于:本发明通过在指令波动较大并且控制量超过第二阈值后,通过执行限流算法降低控制量的增长速率,进而降低电动舵机的瞬态电流,避免电动舵机因瞬态电流过大从而出现故障或者损坏。在控制算法中增加限流算法,给输出设置突变阈值,当舵机瞬间启动时,如果指令与反馈的误差较大,这样可以在启动时刻限制控制器输出,降低瞬间施加在电机绕组上的电压,从而起到降低电动舵机瞬态电流的作用。通过采用限流算法,不需要更改电动舵机的硬件即可实现对瞬态电流的抑制效果,同时第二阈值根据电动舵机的频率特性确定,保证了限流算法不会降低电动舵机的性能。
30、由于电动舵机除了快速性指标,小角度频率特性指标也是非常重要的动态特性指标。为了保证电动舵机动态性能,突变阈值的选定高于频率测试过程中的最大输出,这样限流算法不会对动态指标产生不利影响。
技术特征:
1.一种抑制电动舵机瞬态电流的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述在所述控制量的计算值超过第二阈值的情况下,执行限流算法,包括:
3.根据权利要求2所述的方法,其特征在于,在所述上一次实际输出的控制量小于第三阈值的情况下,根据下述公式计算本次输出的控制量:
4.根据权利要求3所述的方法,其特征在于,在所述上一次实际输出的控制量大于或等于所述第三阈值的情况下,根据下述公式计算本次输出的控制量:
5.根据权利要求4所述的方法,其特征在于,所述第一增长系数和所述第二增长系数通过以下方式确定:
6.根据权利要求1所述的方法,其特征在于,所述第二阈值通过以下方式确定:
7.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求1至6任一项所述的一种抑制电动舵机瞬态电流的方法的步骤。
8.一种电动舵机,其特征在于,包括权利要求7所述的电子设备。
9.一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如权利要求1至6任一项所述的一种抑制电动舵机瞬态电流的方法的步骤。
技术总结
本发明公开了一种抑制电动舵机瞬态电流的方法,包括:获取控制量的计算值;获取输入指令的波动值;若所述输入指令的波动值不超过第一阈值,输出所述控制量的计算值;若所述输入指令的波动值超过所述第一阈值,在所述控制量的计算值超过第二阈值的情况下,执行限流算法,所述限流算法用于在预设时间内降低控制量的增加速率,其中,所述第二阈值根据所述电动舵机的频率特性确定。本发明通过采用限流算法,不需要更改电动舵机的硬件即可实现对瞬态电流的抑制效果,同时第二阈值根据电动舵机的频率特性确定,保证了限流算法不会降低电动舵机的性能。
技术研发人员:崔文昊,张康军,姜杰,陈光辉,茹毅
受保护的技术使用者:贵州航天控制技术有限公司
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!