基于深度学习的步进电机控制系统
本发明涉及步进电机控制领域,尤其是步进电机转速控制系统。
背景技术:
1、步进电机(stepper motor)是一种将电脉冲信号转化为角位移的电机,广泛应用于工业自动化、数控机床、打印机和机器人等领域。与传统电机不同,步进电机的每一个脉冲信号都会使其转动一个固定的角度,因而能够实现精确的位置控制。但是开环步进电机存在精度低的问题,细分脉冲信号不足以实现精确位置控制。此外这些电机消耗的功率高,产生多余热量,并表现出扭矩利用率低下的问题。
2、关于步进电机高精度控制算法,现有技术大多是通过步进电机步距角细分进行控制,且现有的步进电机双闭环控制算法均使用较为常规的pi(proportional-integral)控制算法。为进一步提高控制精度,文献[1](翟雁,郭阳宽,祝连庆,等.步进电机模糊pid闭环控制系统仿真研究[j].现代电子技术,2015,38(11):146-149)中介绍了步进电机分别在pid(proportional-integral-derivative control)和模糊pid控制下的对比仿真结果,证明了在步进电机控制中使用模糊pid控制的重要性和可行性。文献[2](hans,wang w b,wang y,et al.opening and closing positioning control ofthe seedling picking-up mechanism based on fuzzy-pid control algorithm[j].processes,2022.10(7):1349-1349)利用模糊pid控制步进电机以改善步进电机的丢步及低频振动问题,然而步进电机仍然存在高发热、高耗电和低转矩利用效率的问题。这些研究虽然能够一定程度上提高控制精度,但是都无法准备估计出步进电机运行过程中的扰动量,导致控制精度仍然所有欠缺。
技术实现思路
1、为了克服以上不足,本发明提供了一种基于深度学习的步进电机控制系统,能够有效提升步进电机角度和转速在实际应用过程中的控制性能,从而更好地应用于电气传动系统中。
2、本发明提供的技术方案为:
3、一种基于深度学习的步进电机控制系统,包括:
4、p控制器,用于基于步进电机转子的角度误差得到转速给定值ω*,所述角度误差基于编码器经角度计算得到的转子实际角度和角度给定值θ*得到;
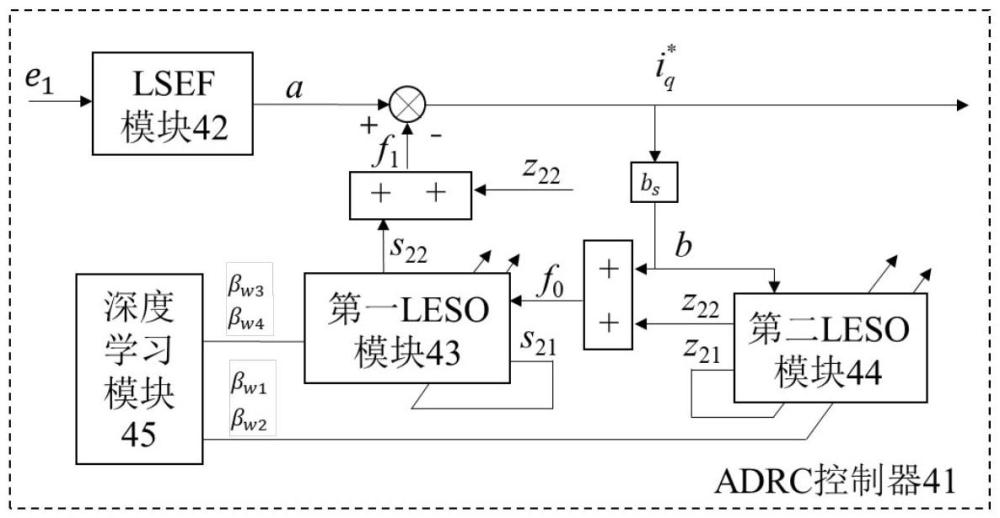
5、adrc控制器,与所述p控制器连接,用于基于所述转速给定值ω*与编码器计算得到的电机实际转速之间的转速误差e1得到交轴电流给定值所述adrc控制器包括级联的第一leso模块和第二leso模块,用于对步进电机运行过程中的转速扰动量进行估计,并反馈调节所述adrc模块的交轴电流给定值
6、第一pi控制器,与所述adrc控制器连接,用于基于所述交轴电流给定值和电流传感器采集的交轴电流实际值iq之间的交轴电流误差得到交轴电压给定值uq;
7、第二pi控制器,用于基于预设直轴电流给定值和电流传感器采集的直轴电流实际值id之间的直轴电流误差得到直轴电压给定值ud;
8、第一坐标变换模块,分别与所述第一pi控制器和第二pi控制器连接,用于将所述交轴电流给定值uq和直轴电压给定值ud经过park逆变换后分别得到静止坐标系下的第一转矩绕组电压uα和第二转矩绕组电压uβ;
9、svpwm模块和逆变器模块,所述svpwm模块与所述第一坐标变换模块连接,所述逆变器模块与所述svpwm模块连接,所述svpwm模块和逆变器模块用于基于所述第一转矩绕组电压uα和第二转矩绕组电压uβ得到步进电机输入电压ua1、ua2、ub1和ub2。
10、本发明提供的基于深度学习的步进电机控制系统,至少能够带来以下有益效果:
11、1.采用三闭环矢量控制,不仅有效解决了步进电机开环控制过程中的精度低的问题,同时效降低了运行过程中的转矩波动问题。
12、2.转速环采用级联adrc控制器,将内部扰动和外部扰动通过第二leso模块估计,并通过第一leso模块提升控制性能。
13、3.使用深度学习模块动态调节第一leso模块和第二leso模块的参数,提高整个控制器的控制效果。
14、4.使用adam算法进行深度学习算法的权值更新,通过计算梯度的一阶矩估计和二阶矩估计来调整每个参数的学习率,从而实现更高效的网络训练。
技术特征:
1.一种基于深度学习的步进电机控制系统,其特征在于,包括:
2.如权利要求1所述的基于深度学习的步电机控制系统,其特征在于,
3.如权利要求2所述的基于深度学习的步电机控制系统,其特征在于,所述lsef模块中,增益控制过程为:
4.如权利要求2所述的基于深度学习的步进电机控制系统,其特征在于,
5.如权利要求2所述的基于深度学习的步进电机控制系统,其特征在于,
6.如权利要求2所述的基于深度学习的步进电机控制系统,其特征在于,
7.如权利要求2所述的基于深度学习的步进电机控制系统,其特征在于,
8.如权利要求2所述的基于深度学习的步进电机控制系统,其特征在于,
9.如权利要求2所述的基于深度学习的步进电机控制系统,其特征在于,
10.如权利要求2所述的基于深度学习的步进电机控制系统,其特征在于,所述深度学习模块中,采用adam算法更新权重和偏差。
技术总结
本发明提供了一种基于深度学习的步进电机控制系统,包括:由P控制器、ADRC控制器、第一PI控制器、第二PI控制器、第一坐标变换模块、SVPWM模块、逆变器模块、第一坐标变换模块和编码器组成。ADRC控制器包括级联的第一LESO模块和第二LESO模块,用于对步进电机运行过程中的转速扰动量进行估计,能够有效提升步进电机角度和转速在实际应用过程中的控制性能,从而更好地应用于电气传动系统中。
技术研发人员:王鑫,王琪,冯荣青
受保护的技术使用者:江苏理工学院
技术研发日:
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!