构网型变流器的相位跳变补偿方法、装置、终端及介质与流程
本发明涉及电力电子,尤其涉及一种构网型变流器的相位跳变补偿方法、装置、终端及介质。
背景技术:
1、构网变流器(grid forming converter,gfm)是一种新型的电力电子设备,主要用于新能源发电并网系统,以提高电力系统的稳定性和可靠性。构网变流器的主要特点是能够自主建立频率和控制电压,减少对外部电压源的依赖性,从而提高系统的稳定性。
2、然而,在电网相位跳变或系统阻抗变化时,由于构网变流器虚拟惯量的存在,构网变流器的输出内电势不能快速跟踪并网点功角,导致变流器易出现过流故障。
技术实现思路
1、本发明实施例提供了一种构网型变流器的相位跳变补偿方法、装置、终端及介质,以解决构网变流器在电网相位跳变或系统阻抗变化时易出现过流故障的问题。
2、第一方面,本发明实施例提供了一种构网型变流器的相位跳变补偿方法,包括:
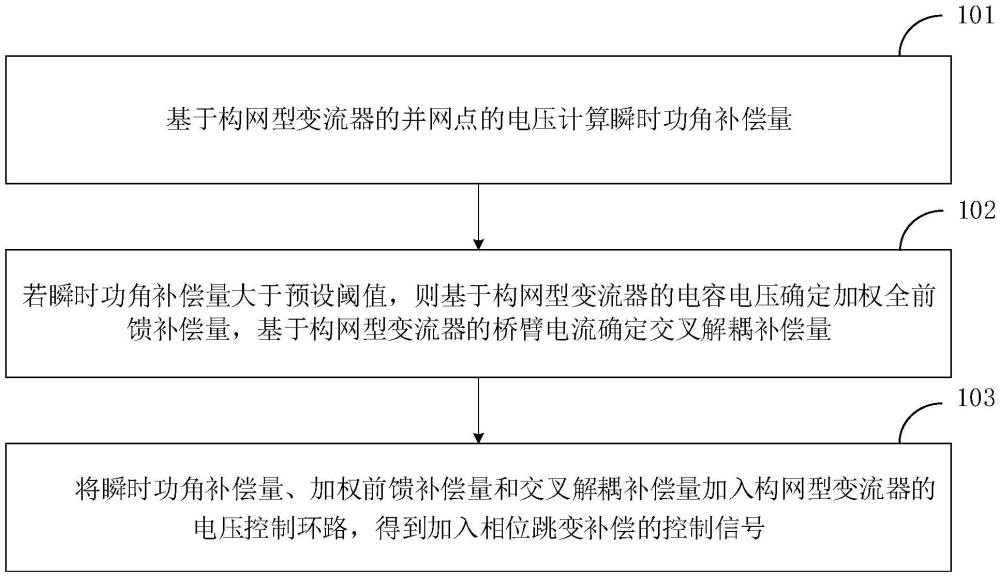
3、基于构网型变流器的并网点的电压计算瞬时功角补偿量;
4、若瞬时功角补偿量大于预设阈值,则基于构网型变流器的电容电压确定加权全前馈补偿量,基于构网型变流器的桥臂电流确定交叉解耦补偿量;
5、将瞬时功角补偿量、加权前馈补偿量和交叉解耦补偿量加入构网型变流器的电压控制环路,得到加入相位跳变补偿的控制信号。
6、在一种可能的实现方式中,基于构网型变流器的并网点的电压计算瞬时功角补偿量的公式为:
7、
8、其中,θc为瞬时功角补偿量,uq1为并网点的q轴电压,ud1为并网点的d轴电压,uq0为并网点稳态下的q轴电压,ud0为并网点稳态下的d轴电压。
9、在一种可能的实现方式中,构网型变流器的机械与电磁模型为:
10、
11、其中,ω为输出角速度,ω0为额定角速度,j为同步电机的转动惯量,tm为同步电机的机械转矩,te为同步电机的电磁转矩,pe为并网点瞬时有功功率,d为阻尼系数,θ为输出功角。
12、在一种可能的实现方式中,加权前馈补偿量的计算公式为:
13、usd1=uref(1-kf)+usdkf
14、usq1=usqkf
15、其中,usd1为d轴的加权前馈补偿量,uref为额定电压,uαβ为并网点电压幅值,kf为预设权重,usd为d轴电容电压,usq1为q轴的加权前馈补偿量,usq为q轴电容电压。
16、在一种可能的实现方式中,在基于构网型变流器的电容电压确定加权全前馈补偿量,基于构网型变流器的桥臂电流确定交叉解耦补偿量之前,还包括:
17、基于构网型变流器的电容电压和桥臂电流计算并网点瞬时有功功率、并网点瞬时无功功率、并网点电压幅值和额定电压;其中,计算并网点瞬时有功功率、并网点瞬时无功功率、并网点电压幅值和额定电压的公式为:
18、pe=1.5×(usd×id+usq×iq)
19、q=1.5×(usd×iq-usq×id)
20、
21、uref=(qref-q)*pn+e0
22、其中,pe为并网点瞬时有功功率,usd为d轴电容电压,usq为q轴电容电压,id为d轴桥臂电流,iq为q轴桥臂电流,q为并网点瞬时无功功率,uαβ为并网点电压幅值,uα为α轴输出电压,uβ为β轴输出电压,uref为额定电压,qref为额定无功功率,pn为电压下垂系数,e0为虚拟内电势空载幅值。
23、在一种可能的实现方式中,交叉解耦补偿量的计算公式为:
24、usd2=iqωl
25、usq2=idωl
26、其中,usd2为d轴的交叉解耦补偿量,iq为q轴桥臂电流,ω为输出角速度,l为同步电机定子电感,usq2为q轴的交叉解耦补偿量,id为d轴桥臂电流。
27、在一种可能的实现方式中,加入相位跳变补偿的控制信号为:
28、θ=∫ωdt+θc
29、usd=pi(uref-uαβ)+usd1-usd2
30、usq=usq1+usq2
31、其中,θ为输出功角,ω为输出角速度,θc为瞬时功角补偿量,usd为d轴电容电压,pi为pi控制器,uref为额定电压,uαβ为并网点电压幅值,usd1为d轴的加权前馈补偿量,usd2为d轴的交叉解耦补偿量,usq为q轴电容电压,usq1为q轴的加权前馈补偿量,usq2为q轴的交叉解耦补偿量。
32、第二方面,本发明实施例提供了一种构网型变流器的相位跳变补偿装置,包括:
33、第一计算模块,用于基于构网型变流器的并网点的电压计算瞬时功角补偿量;
34、第二计算模块,用于在瞬时功角补偿量大于预设阈值时,基于构网型变流器的电容电压确定加权全前馈补偿量,基于构网型变流器的桥臂电流确定交叉解耦补偿量;
35、跳变补偿模块,用于将瞬时功角补偿量、加权前馈补偿量和交叉解耦补偿量加入构网型变流器的电压控制环路,得到加入相位跳变补偿的控制信号。
36、第三方面,本发明实施例提供了一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
37、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
38、本发明实施例提供一种构网型变流器的相位跳变补偿方法、装置、终端及介质,基于构网型变流器的并网点的电压计算相位跳变角度并作为瞬时功角补偿量,在基于瞬时功角进行相位跳变补偿的同时,通过加权前馈补偿减少系统跟踪误差,提高动态响应效果,通过交叉解耦补偿消除变量间的相互影响,能够减小构网型变流器输出响应受到内部的虚拟惯量的影响,快速响应电网变化,提高构网型变流器的电网适应性,包括相角跳变适应性以及电网强度scr适应性,避免相位跳变时出现过流故障。
技术特征:
1.一种构网型变流器的相位跳变补偿方法,其特征在于,包括:
2.根据权利要求1所述的构网型变流器的相位跳变补偿方法,其特征在于,基于构网型变流器的并网点的电压计算瞬时功角补偿量的公式为:
3.根据权利要求1所述的构网型变流器的相位跳变补偿方法,其特征在于,所述构网型变流器的机械与电磁模型为:
4.根据权利要求1所述的构网型变流器的相位跳变补偿方法,其特征在于,加权前馈补偿量的计算公式为:
5.根据权利要求4所述的构网型变流器的相位跳变补偿方法,其特征在于,在基于所述构网型变流器的电容电压确定加权全前馈补偿量,基于所述构网型变流器的桥臂电流确定交叉解耦补偿量之前,还包括:
6.根据权利要求1所述的构网型变流器的相位跳变补偿方法,其特征在于,交叉解耦补偿量的计算公式为:
7.根据权利要求1所述的构网型变流器的相位跳变补偿方法,其特征在于,加入相位跳变补偿的控制信号为:
8.一种构网型变流器的相位跳变补偿装置,其特征在于,包括:
9.一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至7中任一项所述方法的步骤。
技术总结
本发明提供一种构网型变流器的相位跳变补偿方法、装置、终端及介质。该方法包括:基于构网型变流器的并网点的电压计算瞬时功角补偿量;若瞬时功角补偿量大于预设阈值,则基于构网型变流器的电容电压确定加权全前馈补偿量,基于构网型变流器的桥臂电流确定交叉解耦补偿量;将瞬时功角补偿量、加权前馈补偿量和交叉解耦补偿量加入构网型变流器的电压控制环路,得到加入相位跳变补偿的控制信号。本发明能够减小构网型变流器输出响应受到内部的虚拟惯量的影响,快速响应电网变化,提高构网型变流器的电网适应性,包括相角跳变适应性以及电网强度SCR适应性,避免相位跳变时出现过流故障。
技术研发人员:李道波,杨宗丰,袁东旭,娄丽丽
受保护的技术使用者:廊坊英博电气有限公司
技术研发日:
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!