基于反向力矩的无刷轮毂电机驻停安全控制方法
本发明涉及一种基于反向力矩的无刷轮毂电机驻停安全控制方法。
背景技术:
1、具有无刷轮毂电机的代步车、轮椅这类慢速代步工具通常会配备有刹车,刹车为电磁刹车或机械刹车。不管是安装电磁刹车还是机械刹车,都会造成具有无刷轮毂电机的设备整体重量的增加,不利于轻量化。
2、同时,使用电磁刹车的代步车/轮椅在正常行驶时,电磁刹车是一直通电工作的,会导致代步车/轮椅的行驶时的能耗很高,需要采用更大体积的电池,或其行驶路程受到限制;而采用机械刹车的代步车/轮椅则需要人工手动进行刹车驻停。
技术实现思路
1、本发明的目的是提供一种能保证驻停安全,且不需要安装机械刹车或电磁刹车的基于反向力矩的无刷轮毂电机驻停安全控制方法。
2、为实现上述目的,本发明采用了一种基于反向力矩的无刷轮毂电机驻停安全控制方法,包括以下步骤:
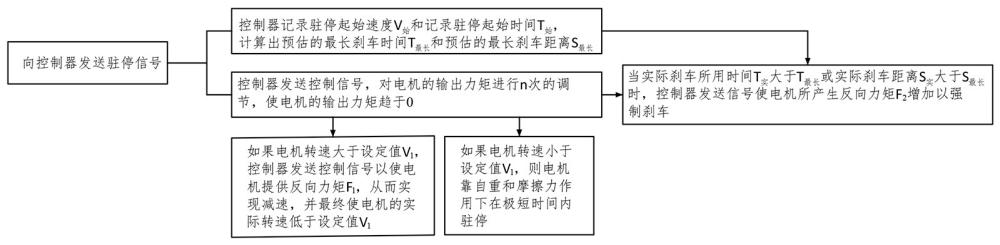
3、s1.向控制器发送驻停信号;
4、s2.控制器记录驻停起始速度v始,根据驻停起始速度v始计算出预估的最长刹车时间t最长和预估的最长刹车距离s最长;
5、s3. 控制器向电机发送控制信号,对电机的输出力矩进行n次的调节,使电机的输出力矩趋于0;
6、如果电机的实际转速经过n次降低输出力矩后大于设定值v1时,则控制器发送控制信号以使电机提供反向力矩f1,从而实现减速,并最终使电机的实际转速低于设定值v1;
7、在步骤s3中,当实际刹车所用时间t实大于t最长或实际刹车距离s实大于s最长时,控制器发送信号使电机所产生反向力矩f2增加以强制刹车,f2>f1。
8、在步骤s1中,可以通过松开代步车油门拨杆或轮椅操纵器摇杆等方式取消其移动以实现驻停信号的发送。步骤s3中,通过多次降低电机的输出力矩,从而实现缓降,使降速更为平稳,以使电机转速到达停车设定值v1,以提高使用者舒适度。其中,设定值v1可以是较低的转速,也可以是0;当设定值v1是较低的接近于0的转速时,通过自重摩擦实现驻停。当实际刹车时间和刹车距离超过预估时间和预估距离时,通过使电机产生反向力矩以强制刹车,将缓刹变为急刹,以实现刹车。其中,n为根据设备型号所设定的具体数值。
9、在本发明方案中,不是采用电磁刹车和机械刹车等实现降速驻停的,不需要在具有本发明无刷轮毂电机的设备上设置相应刹车,能使设备整体更轻,且装配步骤更少,零部件储运管理更方便。
10、作为优选,在步骤s2中,预估的最长刹车时间t最长=t基础+v始*t最快,t基础为基础设定时长,t最快为使用本电机的设备在速度档位最低时刹车至电机输出转速为0的最快时长。
11、基础设定时长可以是根据各种不同型号的具有本电机的设备在水平路面以最低速度档位时刹车至工作转速为0所用的时间。
12、作为优选,在步骤s2中,预估的最长刹车距离s最长=s基础+v始*s1,s基础为基础设定刹车距离,s1为使用本电机的设备的电机转速每多出1 km/h所增加的刹车距离。
13、通过确定最短刹车距离,以避免过快刹车,避免具有本电机的设备在刹车过程中具有较大惯性,降低使用时推背感及前翻风险。同时通过设定最长刹车距离,以防止反向力矩长距离刹车无效,造成具有本发明电机的设备刹车距离过长(比如下坡路段停车),以使具有本发明电机的设备符合相应规范要求。
14、作为优选,在步骤s3中,电机的输出力矩每次经等比例降低。
15、每次降低电机的输出力矩的比例相同,能实现线性降速,使降速更为平稳,。
16、作为优选,在步骤s3中,10≤n≤100。
17、通过至少10次的输出力矩的降低,以保证线性降速;通过使n小于100,从而避免电机输出力矩降低所用时间过长,并避免程序设定过于复杂。同时,不同电机所输出的力矩不同,大输出力矩的电机所需刹车时间应更长,以防止输出力矩减小太快,刹车太急。
18、作为优选,在步骤s3中,随着电机所提供反向力矩f的时间的增加,电机所提供的反向力矩f1逐渐增大,f1后=f1后+(-dir*f定),f定为固定的力矩值,当电机转动方向为正转时,dir为1,反之则dir为-1。其中,f定为根据据设备型号所设定的具体数值;出厂前对对应型号的设备进行刹车测试,从而得到对应该型号的具体数值。
19、作为优选,步骤s2中,记录驻停起始时间t始。
20、作为优选,f2=-kp*pos+sumi,sumi后 = sumi前+(-spd*ki);其中, kp为移动距离调节参数,pos为移动距离,向前为正,向后为负;sumi为速度调节积分值,spd为转动速度,向前为正,向后为负,ki为调节比例;如果spd*sumi>0,则sumi清零,重新计算sumi后。
21、本发明具有能使具有无刷轮毂电机的设备能安全驻停,且不需要设置电磁刹车和机械刹车的优点。
技术特征:
1.一种基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于包括以下步骤:
2.根据权利要求1所述的基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于:在步骤s2中,预估的最长刹车时间t最长=t基础+v始*t最快,t基础为基础设定时长,t最快为使用本电机的设备在速度档位最低时刹车至电机输出转速为0的最快时长。
3.根据权利要求1所述的基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于:在步骤s2中,预估的最长刹车距离s最长=s基础+v始*s1,s基础为基础设定刹车距离,s1为使用本电机的设备的电机转速每多出1 km/h所增加的刹车距离。
4.根据权利要求1所述的基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于:在步骤s3中,电机的输出力矩每次经等比例降低。
5.根据权利要求1或4所述的基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于:在步骤s3中,10≤n≤100。
6.根据权利要求1所述的基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于:在步骤s3中,随着电机所提供反向力矩f的时间的增加,电机所提供的反向力矩f1逐渐增大,f1后=f1前+(-dir*f定),f定为固定的力矩值,当电机转动方向为正转时,dir为1,反之则dir为-1。
7.根据权利要求1所述的基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于:步骤s2中,记录驻停起始时间t始。
8.根据权利要求1所述的基于反向力矩的无刷轮毂电机驻停安全控制方法,其特征在于:f2=-kp*pos+sumi,sumi后 = sumi前+(-spd*ki);其中, kp为移动距离调节参数,pos为移动距离,向前为正,向后为负;sumi为速度调节积分值,spd为转动速度,向前为正,向后为负,ki为调节比例;如果spd*sumi>0,则sumi清零,重新计算sumi后。
技术总结
本发明涉及一种基于反向力矩的无刷轮毂电机驻停安全控制方法。本发明采用了一种基于反向力矩的无刷轮毂电机驻停安全控制方法,包括以下步骤:S1.向控制器发送驻停信号;S2.控制器记录驻停起始速度V<subgt;始</subgt;,计算出预估的最长刹车时间T<subgt;最长</subgt;和预估的最长刹车距离S<subgt;最长</subgt;;S3.对电机的输出力矩进行n次的调节,使电机的输出力矩趋于0;如果电机的实际转速经过n次降低输出力矩后大于设定值V<subgt;1</subgt;时,则控制器发送控制信号以使电机提供反向力矩F<subgt;1</subgt;,从而实现减速,并最终使电机的实际转速低于设定值V<subgt;1</subgt;。本发明具有能使具有无刷轮毂电机的设备能安全驻停,且不需要设置电磁刹车的优点。
技术研发人员:付新,孙祝兵,胡亮,苏芮
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!