基于直接瞬时转矩控制的开关磁阻电机控制方法
本发明涉及电机控制领域,尤其涉及基于直接瞬时转矩控制的开关磁阻电机控制方法。
背景技术:
1、开关磁阻电机(srm)结构简单、成本较低、调速范围广、在恶劣环境下也可以正常工作,因而在家电、工业制造、新能源汽车、航空航天等领域应用广泛。但是srm本身的双凸级结构使其具有很强的非线性,导致在工作过程中,尤其是在换相时会出现转矩脉动较大的问题。为了解决该问题,现有技术中,已经采用了采用了直接瞬时转矩控制策略,电感随转子位置角的变化率合理地安排导通相,根据在某一位置导通相个数不同将每一相的工作周期分为单相导通区和两相导通区(换相区),但未能充分考虑srm的工作特性的问题;现有技术中,转速环通常采用pi控制,但pi控制难以解决快速性与超调之间的矛盾,在一些调速要求较高的场合难以达到要求。
技术实现思路
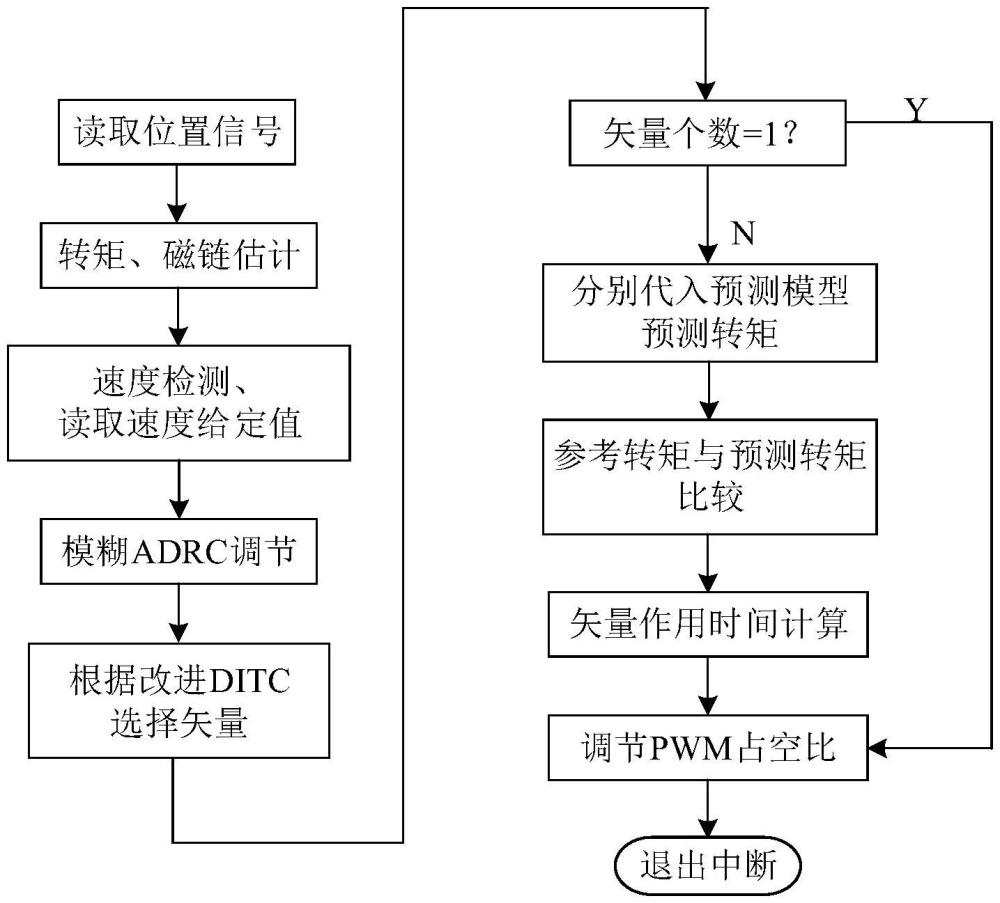
1、有鉴于现有技术的上述缺陷,本发明提供了基于直接瞬时转矩控制的开关磁阻电机控制方法,所述开关磁阻电机的功率变换器包括三相桥臂,包括如下步骤:
2、根据参考转矩tref和实际转矩t做差得到转矩差值δt,转矩差值δt的数值和变化趋势依据导通规则得到此时三相开关的状态组合成电压矢量;
3、当所得到电压矢量的数量为一个时,将该电压矢量在下个控制周期内,作用到开关磁阻电机的功率变换器,当所得到的电压矢量数量为两个时,根据所述电压矢量计算对应的预测转矩,将预测转矩与参考转矩进行比较,根据比较的结果来判断需要作用的矢量,将其作用到开关磁阻电机的功率变换器。
4、进一步的,所述导通规则中,换相区分为换相区1和换相区2,设定转矩滞环控制规则的内限值δtmax和外限值δtmin;
5、在换相区1中,开通相的导通规则为:当δt<-δtmin时,状态为0,当-δtmin<δt<0时,状态为0或1,当δt>0时,状态为1;关断相的导通规则为:当δt<-δtmax时,状态为-1,当-δtmax<δt<-δtmin时,状态为0或-1,当-δtmin<δt<0时,状态为0,当0<δt<δtmax时,状态为0或1,当δt>δtmax,状态为1;
6、在换相区2中,开通相的导通规则为:δt<-δtmax时,状态为-1,当-δtmax<δt<-δtmin时,状态为0或-1,当-δtmin<δt<0,状态为0,当0<δt<δtmin时,状态为0或1,当δt>δtmin,状态为1;关断相的导通规则为:当δt<-δtmin时,状态为-1,当-δtmin<δt<0时,状态为0或-1,当0<δt<δtmin时,状态为0,当δtmin<δt<δtmax时,状态为0或1,当δt>δtmax时,状态为1。
7、进一步的,所述预测转矩tk+1为:
8、
9、其中,ik+1为k+1时刻的电流值;θk+1为k+1时刻的转子位置角;ldsat为饱和后的电感;a、b为常数。
10、进一步的,当所得到的电压矢量数量为v1和v2时,对应的预测转矩分别为设为tmax和tmin,且tmin小于tmax;
11、当tref<tmin时,选择电压矢量v2在下个控制周期持续作用;
12、当tref>tmax时,选择电压矢量v1在下个控制周期持续作用;
13、当tmin<tref<tmax时,调节两个矢量作用的时间,将两个电压矢量都在下个控制周期持续作用。
14、进一步的,电压矢量v1和v2的作用时间t1和t2分别为:
15、
16、进一步的,所述参考转矩tref的获取方法包括:
17、参考转速ωref经一阶微分跟踪器得到跟踪信号ω1,二阶扩张状态观测器输出信号的观测值z1与跟踪信号ω1作差后经非线性状态误差反馈率得到转矩t,结合系统总干扰的估计值z2得到参考转矩tref。
18、进一步的,所述非线性状态误差反馈率的控制方程为:
19、
20、式中:k1为跟踪因子;δ为滤波因子;α3为可调的非线性因子。
21、进一步的,所述跟踪因子k1通过模糊控制方法进行整定。
22、本发明与现有技术相比,具有以下技术效果:
23、1、本发明对传统直接瞬时转矩控制的换相区进行了细分,够较为明显地抑制换相区转矩脉动。采用多种矢量组合方式的选择及其作用时间的精确计算,提高了控制精度。通过与传统直接瞬时转矩控制仿真结果进行对比可知,该方法在不同负载、不同转速下均能使转矩脉动减少15%以上,在保证转矩的前提下使电流峰值减小0.5a以上,还能抑制负转矩的产生
24、2、本发明针对直接瞬时转矩转速环的pi控制器存在响应速度慢和超调比较大的问题,采用非线性自抗扰控制器代替传统pi控制器,提高了控制器输出参考转矩的精度,减少了转速环对转矩内环的影响。由于adrc参数设计难以适应非线性、参数复杂时变的srm驱动系统,采用模糊控制器对其参数进行调节。通过仿真结果显示,模糊自抗扰控制相比于pi控制和自抗扰控制系统响应时间更短、超调量更小、具有较好的抗干扰性能与鲁棒性。
25、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:
1.基于直接瞬时转矩控制的开关磁阻电机控制方法,所述开关磁阻电机的功率变换器包括三相桥臂,其特征在于,包括如下步骤:
2.根据权利要求1所述基于直接瞬时转矩控制的开关磁阻电机控制方法,其特征在于,所述导通规则中,换相区分为换相区1和换相区2,设定转矩滞环控制规则的内限值δtmax和外限值δtmin;
3.根据权利要求1所述基于直接瞬时转矩控制的开关磁阻电机控制方法,其特征在于,所述预测转矩tk+1为:
4.根据权利要求1所述基于直接瞬时转矩控制的开关磁阻电机控制方法,其特征在于,当所得到的电压矢量数量为v1和v2时,对应的预测转矩分别为设为tmax和tmin,且tmin小于tmax;
5.根据权利要求4所述基于直接瞬时转矩控制的开关磁阻电机控制方法,其特征在于,电压矢量v1和v2的作用时间t1和t2分别为:
6.根据权利要求1所述基于直接瞬时转矩控制的开关磁阻电机控制方法,其特征在于,所述参考转矩tref的获取方法包括:
7.根据权利要求6所述基于直接瞬时转矩控制的开关磁阻电机控制方法,其特征在于,所述非线性状态误差反馈率的控制方程为:
8.根据权利要求7所述基于直接瞬时转矩控制的开关磁阻电机控制方法,其特征在于,所述跟踪因子k1通过模糊控制方法进行整定。
技术总结
本发明公开了基于直接瞬时转矩控制的开关磁阻电机控制方法,涉及电机控制领域。本发明根据参考转矩T<subgt;ref</subgt;和实际转矩T做差得到转矩差值ΔT,转矩差值ΔT的数值和变化趋势依据导通规则得到此时三相开关的状态组合成电压矢量;当所得到电压矢量的数量为一个时,将该电压矢量在下个控制周期内,作用到开关磁阻电机的功率变换器,当所得到的电压矢量数量为两个时,根据所述电压矢量计算对应的预测转矩,将预测转矩与参考转矩进行比较,根据比较的结果来判断需要作用的矢量,将其作用到开关磁阻电机的功率变换器。本发明既能减小单相导通区又能减小换相区的转矩脉动,在动态情况下效果更佳。
技术研发人员:周永勤,周飞达,王聪慧,师彤彤,王瑞涛
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!