一种基于无人机的输电线路四分裂导线无损检测机器人的制作方法
本发明涉及输电线路检测,具体涉及一种基于无人机的输电线路四分裂导线无损检测机器人。
背景技术:
1、现有对高压电线进行检测的方式,通常是使用无人机对其进行dr成像检测,但该使用无人机配合相应结构进行检测的设备,多是都是针对单线线夹或多线线夹进行检测,如果需要全部检测,需要多次挂设在不同导线上进行检测,进而降低了分裂导线的检测效率,基于此,本专利的申请人提供了一种基于无人机的四分裂导线x射线检测机器人及检测方法,见参考文献1。
2、参考文献1:专利公开号为cn118549471a的中国专利文献。
3、参考文献1公开了一种基于无人机的四分裂导线x射线检测机器人及检测方法,该机器人包括挂设在分裂导线上并沿分裂导线行走的机架,机架包括架体以及中部设在架体上的机架。机架上设有矩形挂架以及设置在矩形挂架下端四角的定位部,两个相对且与机架平行的定位部转动穿设有转杆,转杆的一端设有行走辊,转杆的一端设有行走辊,转杆的一端设置了一个长度较长的行走辊,用以适应因分裂导线处于同一水平高度的分导线间距存在偏差的检测场景中。
4、然而,参考文献1中记载的矩形挂架是通过设备的重量,来压覆在分裂导线上进行设备定位或设备移动的,而通过设备重量进行的定位或移动,在遇到大风天气或雨雪天气时,极易造成设备与分裂导线分离造成设备坠落的问题。
技术实现思路
1、本发明的目的是为解决现有技术中四分裂导线x摄像检测机器人易受环境影响,轻易与四分裂导线分离造成设备坠落损坏的问题,提供一种基于无人机的输电线路四分裂导线无损检测机器人。
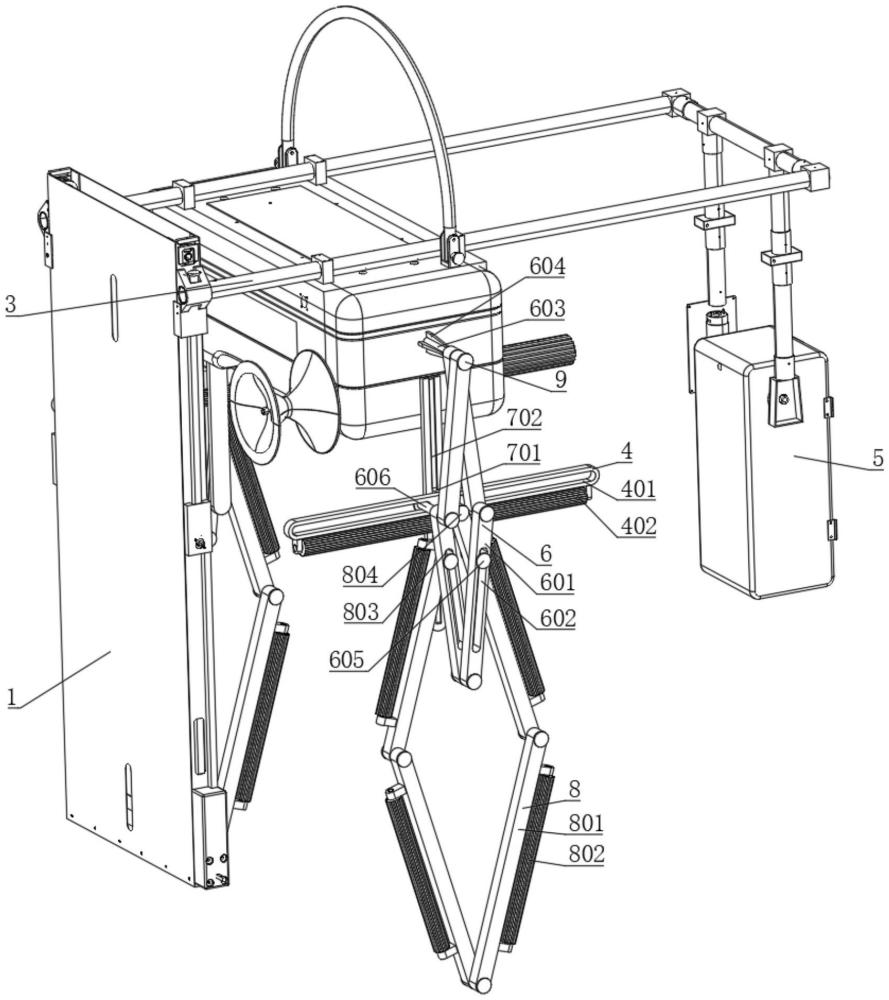
2、本发明为解决上述技术问题的不足,所采用的技术方案是:一种基于无人机的输电线路四分裂导线无损检测机器人,其具有:能够搭设在分裂导线上并进行移动的矩形挂架,矩形挂架的两端分别设有成像组件和射线机,矩形挂架的中部设置有机箱,所述矩形挂架沿其移动方向的两侧分别设有竖向滑动的驱动横架,驱动横架下部设有使其能够在分裂导线上移动的滚柱,所述驱动横架上设有扩撑组件和传动组件;
3、所述传动组件为四个传动连杆组成的四连杆结构,传动组件上端的铰接轴固定在机箱的承载柱上,传动组件中部的两个铰接轴均同轴连接有第二铰柱,两个第二铰柱分别滑动设置在驱动横架上开设的两个横槽内;
4、所述扩撑组件为四个扩撑连杆组成的四连杆结构,扩撑组件上部的铰接轴固定在驱动横架的定位柱上,且四个扩撑连杆的外侧均转动设有滚动辊;
5、所述传动组件下部两个传动连杆上均设有传动滑槽,扩撑组件下部的两个扩撑连杆上均开设有对接孔,对接孔与传动滑槽通过第一铰柱铰接。
6、作为本发明一种基于无人机的输电线路四分裂导线无损检测机器人的进一步优化:所述承载柱与机箱之间设有多个加强筋,多个加强筋围绕承载柱设置。
7、作为本发明一种基于无人机的输电线路四分裂导线无损检测机器人的进一步优化:两个所述横槽的相背端与两个第二铰柱之间均设有拉紧弹簧,且两个拉紧弹簧的拉紧力小于机箱、矩形挂机、成像组件和射线机的重量。
8、作为本发明一种基于无人机的输电线路四分裂导线无损检测机器人的进一步优化:所述扩撑组件下侧的两个扩撑连杆连接处转动设有配重块。
9、作为本发明一种基于无人机的输电线路四分裂导线无损检测机器人的进一步优化:所述承载柱以及第二铰柱背离矩形挂架的端部均设有限制盘,且限制盘与承载柱或第二铰柱螺纹连接。
10、作为本发明一种基于无人机的输电线路四分裂导线无损检测机器人的进一步优化:所述滚动辊为弹性橡胶材质制成。
11、作为本发明一种基于无人机的输电线路四分裂导线无损检测机器人的进一步优化:所述驱动横架朝向矩形挂架的侧面上固定设有滑块,滑块设于驱动横架中心处,且滑块与设于矩形挂架上的滑轨滑动配合。
12、作为本发明一种基于无人机的输电线路四分裂导线无损检测机器人的进一步优化:所述滚柱以及滚动辊外周面均设有均匀的凹槽。
13、与现有技术相比,本发明具有以下有益效果:
14、本发明通过设置驱动横架放置在分裂导线上作为支撑,随后便可利用矩形挂架以及设于竖向挂架上的成像组件和射线机重量,来驱动设于矩形挂架上的传动组件收缩,即令组成传动组件的四个传动连杆竖向间距缩短,之后下侧传动连杆上的两个传动滑槽,将配合第一铰柱驱动扩撑组件展开,来令扩撑组件外侧设置的滚动辊顶压分裂导线,以将矩形挂架稳定束缚到分裂导线上,进而降低矩形挂架从分裂导线上的坠落的概率。
15、进一步的,扩撑组件外侧设置的滚动辊顶压分裂导线,还可令矩形挂架随分裂导线同步晃动,进而使成像组件和射线机的晃动幅度,与分裂导线的晃动保持相对一致,从而稳定成像组件和射线机拍摄检测分裂导线的图像质量。
技术特征:
1.一种基于无人机的输电线路四分裂导线无损检测机器人,其具有:能够搭设在分裂导线(2)上并进行移动的矩形挂架(3),矩形挂架(3)的两端分别设有成像组件(1)和射线机(5),矩形挂架(3)的中部设置有机箱,其特征在于,所述矩形挂架(3)沿其移动方向的两侧分别设有竖向滑动的驱动横架(4),驱动横架(4)下部设有使其能够在分裂导线(2)上移动的滚柱(402),所述驱动横架(4)上设有扩撑组件(8)和传动组件(6);
2.如权利要求1所述一种基于无人机的输电线路四分裂导线无损检测机器人,其特征在于:所述承载柱(603)与机箱之间设有多个加强筋(604),多个加强筋(604)围绕承载柱(603)设置。
3.如权利要求1所述一种基于无人机的输电线路四分裂导线无损检测机器人,其特征在于:两个所述横槽(401)的相背端与两个第二铰柱(606)之间均设有拉紧弹簧(403),且两个拉紧弹簧(403)的拉紧力小于机箱、矩形挂机、成像组件(1)和射线机(5)的重量。
4.如权利要求1所述一种基于无人机的输电线路四分裂导线无损检测机器人,其特征在于:所述扩撑组件(8)下侧的两个扩撑连杆(801)连接处转动设有配重块(805)。
5.如权利要求1所述一种基于无人机的输电线路四分裂导线无损检测机器人,其特征在于:所述承载柱(603)以及第二铰柱(606)背离矩形挂架(3)的端部均设有限制盘(9),且限制盘(9)与承载柱或第二铰柱(606)螺纹连接。
6.如权利要求1所述一种基于无人机的输电线路四分裂导线无损检测机器人,其特征在于:所述滚动辊(802)为弹性橡胶材质制成。
7.如权利要求1所述一种基于无人机的输电线路四分裂导线无损检测机器人,其特征在于:所述驱动横架(4)朝向矩形挂架(3)的侧面上固定设有滑块(701),滑块(701)设于驱动横架(4)中心处,且滑块(701)与设于矩形挂架(3)上的滑轨(702)滑动配合。
8.如权利要求1所述一种基于无人机的输电线路四分裂导线无损检测机器人,其特征在于:所述滚柱(402)以及滚动辊(802)外周面均设有均匀的凹槽(10)。
技术总结
本发明公开了一种基于无人机的输电线路四分裂导线无损检测机器人,其具有,能够搭设在分裂导线上并进行移动的矩形挂架,矩形挂架的两端分别设有成像组件和射线机,矩形挂架的中部设置有机箱,所述矩形挂架沿其移动方向的两侧分别设有竖向滑动的驱动横架,驱动横架下部设有使其能够在分裂导线上移动的滚柱,所述驱动横架上设有扩撑组件和传动组件。以解决现有技术中四分裂导线X摄像检测机器人易受环境影响,轻易与四分裂导线分离造成设备坠落损坏的问题。
技术研发人员:岳灵平,李龙,陈瑞斌,来骏,刘平平,戴建华,李浩言,方杰,程亮亮,王一帆,张鹏,许大令,马波,张辉,谭兴华,张明磊,从鹏松,李旭,仝海龙,赵鑫宇,白玉珂,熊忠,王志广,吕金勇,刘礼琴,陈丽红,王恩光,冯鑫,冯帅军,张明杰
受保护的技术使用者:国网浙江省电力有限公司湖州供电公司
技术研发日:
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!