一种电机转子位置检测装置的制作方法
本技术涉及电机,尤其涉及一种电机转子位置检测装置。
背景技术:
1、电机俗称“马达”,是指依据电磁感应定律实现电能转换或传递的一种电磁装置;电机按工作电源种类划分,可分为直流电机和交流电机,传统有刷直流电机需要加装转子位置传感器来检测转子位置信息,传统技术中通常设置一个霍尔传感器配合磁环来检测转子的位置,具体结构是将磁环固定在转子上,将霍尔传感器设置在底壳上,当转子转动时,带动磁环转动,霍尔传感器感应到磁极变换时,输出脉冲信号,进而根据脉冲信号确定转子的位置,然而该结构的转子位置信息的分辨精度却不够高,至于此,申请人提出了一种电机转子位置检测装置,实现进一步提高转子位置信息的分辨精度。
技术实现思路
1、本实用新型的目的在于进一步提高转子位置信息的分辨精度。
2、为了实现上述目的,本实用新型所采取的技术方案如下:
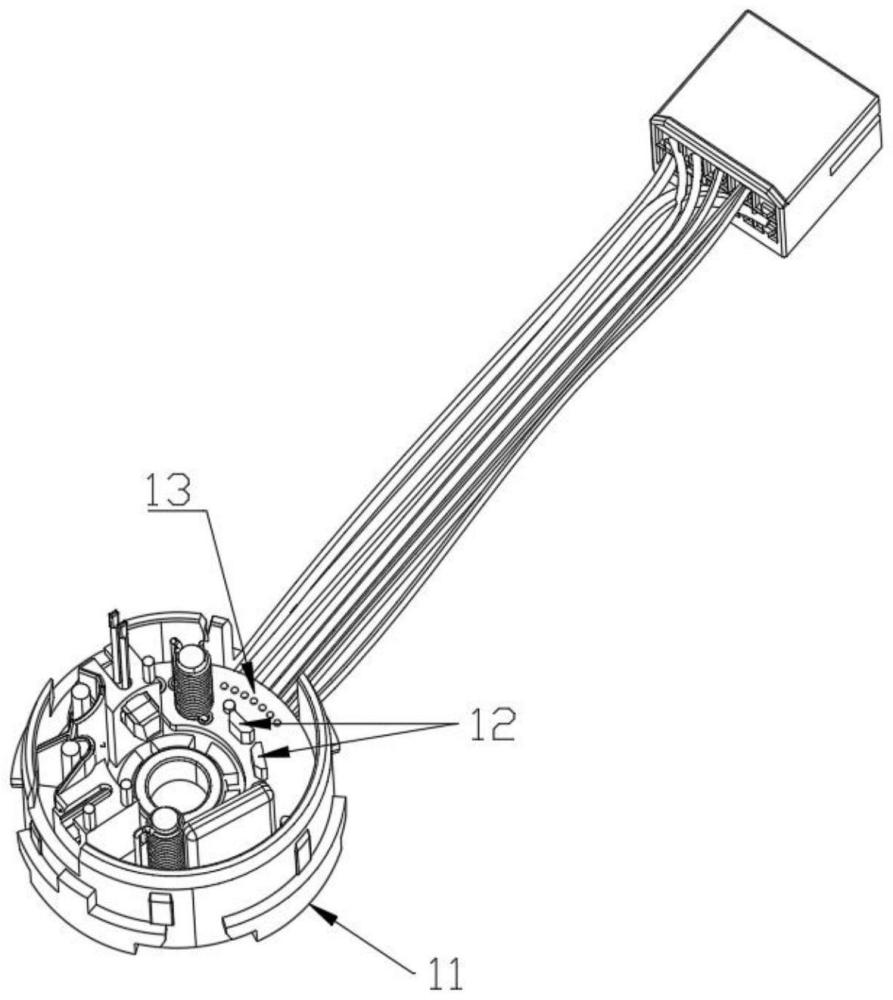
3、一种电机转子位置检测装置,包括前盖组件、定子组件、转子组件、后盖组件、多极感应磁体环组件、霍尔传感器和主控mcu,所述前盖组件和后盖组件分别固定设置在定子组件的两端处,所述转子组件位于定子组件内,且转子组件的两端分别枢接在前盖组件和后盖组件上,所述多极感应磁体环组件固定设置在转子组件上,所述霍尔传感器至少有两组,且以转子组件的中心轴为中心呈圆周阵列固定设置在后盖组件内侧,所述霍尔传感器与多极感应磁体环组件相互配合,所述霍尔传感器与主控mcu信号连接,所述主控mcu控制转子组件转动。
4、进一步地,还包括主控霍尔板,所述主控霍尔板固定设置在后盖组件的内侧,所述霍尔传感器均设置在主控霍尔板上,所述主控霍尔板与主控mcu电性连接。
5、进一步地,所述主控霍尔板呈半环状,且其中心轴与转子组件的中心轴共线。
6、进一步地,所述前盖组件、定子组件、转子组件、后盖组件、多极感应磁体环组件的中心轴均共线。
7、进一步地,所述多极感应磁体环组件沿自身周向均匀分布有多个极性相反的磁块。
8、进一步地,所述多极感应磁体环组件包括四个n极磁块和四个s极磁块,四个n极磁块和四个s极磁块相互交错分布。
9、进一步地,所述霍尔传感器有两组。
10、进一步地,两组霍尔传感器相差四十五度机械角度。
11、进一步地,所述霍尔传感器有三组。
12、进一步地,三组霍尔传感器依次相差三十度机械角度。
13、本实用新型的有益效果为:本实用新型通过设置多极感应磁体环组件以及至少两组霍尔传感器,转子组件转动时带动多极感应磁体环组件转动,转子组件每带动多极感应磁体环组件转动一周,多组霍尔传感器将感应到的多个脉冲信号全部传输至主控mcu,从而使主控mcu通过脉冲信号知晓转子组件的具体位置,而转子组件的位置分辨精度为:360除以转子组件转动一周时多组霍尔传感器输出的总的脉冲信号,该精度值远小于传统技术中依靠一个霍尔传感器配合磁环所检测的位置精度值,从而使得本实用新型的位置分辨角度值变小,进而提高了转子位置信息的分辨精度。
技术特征:
1.一种电机转子位置检测装置,其特征在于:包括前盖组件、定子组件、转子组件、后盖组件、多极感应磁体环组件、霍尔传感器和主控mcu,所述前盖组件和后盖组件分别固定设置在定子组件的两端处,所述转子组件位于定子组件内,且转子组件的两端分别枢接在前盖组件和后盖组件上,所述多极感应磁体环组件固定设置在转子组件上,所述霍尔传感器至少有两组,且以转子组件的中心轴为中心呈圆周阵列固定设置在后盖组件内侧,所述霍尔传感器与多极感应磁体环组件相互配合,所述霍尔传感器与主控mcu信号连接,所述主控mcu控制转子组件转动。
2.根据权利要求1所述的一种电机转子位置检测装置,其特征在于:还包括主控霍尔板,所述主控霍尔板固定设置在后盖组件的内侧,所述霍尔传感器均设置在主控霍尔板上,所述主控霍尔板与主控mcu电性连接。
3.根据权利要求2所述的一种电机转子位置检测装置,其特征在于:所述主控霍尔板呈半环状,且其中心轴与转子组件的中心轴共线。
4.根据权利要求1所述的一种电机转子位置检测装置,其特征在于:所述前盖组件、定子组件、转子组件、后盖组件、多极感应磁体环组件的中心轴均共线。
5.根据权利要求1所述的一种电机转子位置检测装置,其特征在于:所述多极感应磁体环组件沿自身周向均匀分布有多个极性相反的磁块。
6.根据权利要求5所述的一种电机转子位置检测装置,其特征在于:所述多极感应磁体环组件包括四个n极磁块和四个s极磁块,四个n极磁块和四个s极磁块相互交错分布。
7.根据权利要求6所述的一种电机转子位置检测装置,其特征在于:所述霍尔传感器有两组。
8.根据权利要求7所述的一种电机转子位置检测装置,其特征在于:两组霍尔传感器相差四十五度机械角度。
9.根据权利要求6所述的一种电机转子位置检测装置,其特征在于:所述霍尔传感器有三组。
10.根据权利要求9所述的一种电机转子位置检测装置,其特征在于:三组霍尔传感器依次相差三十度机械角度。
技术总结
本技术公开了一种电机转子位置检测装置,涉及电机技术领域,包括前盖组件、定子组件、转子组件、后盖组件、多极感应磁体环组件、霍尔传感器和主控MCU,所述前盖组件和后盖组件分别固定设置在定子组件的两端处,所述转子组件位于定子组件内,且转子组件的两端分别枢接在前盖组件和后盖组件上,所述多极感应磁体环组件固定设置在转子组件上,所述霍尔传感器至少有两组,且以转子组件的中心轴为中心呈圆周阵列固定设置在后盖组件内侧,所述霍尔传感器与多极感应磁体环组件相互配合,所述霍尔传感器与主控MCU信号连接,所述主控MCU控制转子组件转动;本技术进一步提高了转子位置信息的分辨精度以及实现了分辨转子组件的转向。
技术研发人员:钟柳华,杜成顺,王俞超
受保护的技术使用者:玲动电器(广东)有限公司
技术研发日:20240318
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!