一种超声波振子及超声波马达的制作方法
本申请涉及驱动设备,更具体地说,是涉及一种超声波振子及超声波马达。
背景技术:
1、随着科技的不断发展,人们对于一些微型产品(例如小型摄像头、振镜等)的运动精度要求越来越高。以旋转振镜为例,旋转振镜需要具有较高的旋转精度。目前市场上主要采用的是电磁类电机进行驱动旋转振镜旋转,常见的设置方式为通过步进电机和齿轮箱配合驱动旋转振镜旋转。但是,体积小且精度高的齿轮箱不仅制作难度大、制作成本也高,并且小型的步进电机输出扭矩较小、输出精度较低且噪声较大,从而导致电磁类电机对于微型产品的驱动精度较低并且噪声较大。
技术实现思路
1、本申请实施例的目的在于提供一种超声波振子及超声波马达,旨在解决现有技术中电磁类电机对于微型产品的驱动精度较低且噪声较大的技术问题。
2、为实现上述目的,本申请采用的技术方案是:提供一种超声波振子,包括压电陶瓷部和摩擦部;
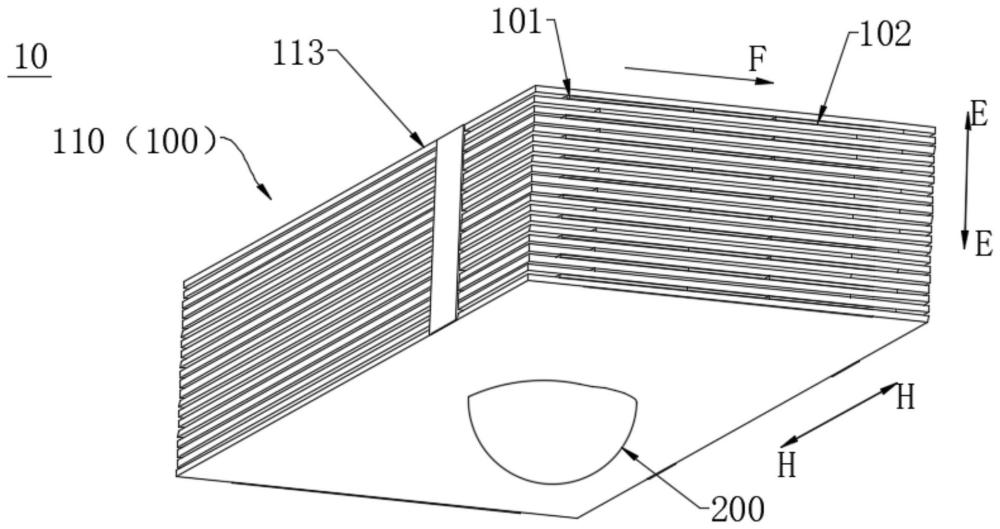
3、所述压电陶瓷部包括第一压电层组,所述第一压电层组包括多个第一信号电极片组和第一陶瓷片,多个所述第一信号电极片组沿第一方向间隔设置,各所述第一信号电极片组在所述第一方向上的相对两侧分别对应设置有所述第一陶瓷片;
4、各所述第一陶瓷片的极化方向为自身沿所述第一方向靠近对应的所述第一信号电极片组的方向,或者,各所述第一陶瓷片的极化方向为自身沿所述第一方向远离对应的所述第一信号电极片组的方向;
5、所述第一信号电极片组包括第一信号电极片和第二信号电极片,所述第一信号电极片和所述第二信号电极片沿第二方向依次间隔设置,所述第一方向与所述第二方向呈夹角设置;所述第一信号电极片用于输入第一交流信号,所述第二信号电极片用于输入第二交流信号,所述第一交流信号和所述第二交流信号具有第一相位差;各所述第一陶瓷片接地,且各所述第一陶瓷片分别与对应的所述第一信号电极片组中的所述第一信号电极片和所述第二信号电极片相贴,以使各所述第一陶瓷片分别与对应的所述第一信号电极片和对应的所述第二信号电极片电连接;
6、所述摩擦部安装于所述第一压电层组在所述第一方向上的一侧。
7、在一种可能的设计中,所述压电陶瓷部还包括第二压电层组,所述第二压电层组连接于所述第一压电层组在所述第一方向上的一侧;所述第二压电层组包括多个第二信号电极片组和多个第二陶瓷片,多个所述第二信号电极片组沿所述第一方向间隔设置,各所述第二信号电极片组在所述第一方向上的相对两侧分别对应设置有所述第二陶瓷片;
8、各所述第一陶瓷片的极化方向为自身沿所述第一方向靠近对应的所述第一信号电极片组的方向,各所述第二陶瓷片的极化方向为自身沿所述第一方向远离对应的所述第二信号电极片组的方向;
9、所述第二信号电极片组包括第一信号电极片和第二信号电极片,所述第一信号电极片和所述第二信号电极片沿第三方向依次间隔设置,所述第二方向和所述第三方向为相反方向;
10、各所述第二陶瓷片接地,且各所述第二陶瓷片分别与对应的所述第二信号电极片组中的所述第一信号电极片和所述第二信号电极片相贴,以使各所述第二陶瓷片分别与对应的所述第一信号电极片和对应的所述第二信号电极片电连接;
11、所述摩擦部安装于所述第一压电层组背离所述第二压电层组的一侧,或者,所述摩擦部安装于所述第二压电层组背离所述第一压电层组的一侧。
12、在一种可能的设计中,所述超声波振子还包括弹片,所述弹片具有相互连接的弹性部和夹持部,所述夹持部夹持于所述压电陶瓷部的相对两侧,所述弹性部位于所述压电陶瓷部背离所述摩擦部的一侧,所述弹性部用于抵接在超声波马达的壳体上。
13、在一种可能的设计中,所述夹持部的数量为两个,两个所述夹持部分别与弹性部连接,且两个所述夹持部沿第四方向间隔设置,所述第二方向与所述第四方向呈夹角设置;在所述第四方向上,两个所述夹持部之间的距离等于所述压电陶瓷部在所述第四方向上的长度的40%~60%,并且在所述第四方向上,两个所述夹持部相对于所述压电陶瓷部的中心点对称设置。
14、在一种可能的设计中,所述超声波振子还包括金属基体,所述金属基体连接于所述第一压电层组在所述第一方向上的一侧。
15、在一种可能的设计中,所述摩擦部安装于所述金属基体背离所述第一压电层组的一侧。
16、在一种可能的设计中,所述金属基体沿第五方向贯穿设置有条形孔,所述第五方向与所述第一方向呈夹角设置,所述条形孔的长度方向分别与所述第一方向和所述第五方向呈夹角设置。
17、在一种可能的设计中,所述金属基体具有所述第一方向平行的周侧面,所述周侧面上凸出设置有金属弹片,所述金属弹片用于与超声波马达的壳体连接。
18、本申请还提供了一种超声波马达,包括驱动部以及上述任一技术方案提供的超声波振子,所述摩擦部与所述驱动部的表面抵接。
19、在一种可能的设计中,所述超声波振子的数量为多个,多个所述超声波振子间隔设置,各所述超声波振子的所述摩擦部分别与所述驱动部的表面抵接。
20、本申请提供的超声波振子的有益效果在于:与现有技术相比,本申请提供的超声波振子,由于各第一陶瓷片的极化方向均为自身沿第一方向靠近或远离对应的第一信号电极片组的方向,并且各第一陶瓷片在接地的同时分别与第一信号电极片和第二信号电极片电连接,因此,当第一信号电极片向与自身连接的第一陶瓷片输入第一交流信号后,第一陶瓷片中对应与该第一信号电极片连接的区域将连续交替伸长和收缩;当第二信号电极片向与自身连接的第一陶瓷片输入第二交流信号后,第一陶瓷片对应与该第二信号电极片连接的区域也将连续交替伸长和收缩。又由于第一交流信号和第二交流信号具有第一相位差,因此当第一信号电极片和第二信号电极片分别向对应的第一陶瓷片输入第一交流信号和第二交流信号后,可使整个第一压电层组的各第一陶瓷片中分别与第一信号电极片和第二信号电极片对应连接的区域交替伸长或收缩,从而使整个第一压电层组产生一定规律的形变,以带动安装在第一压电层组上的摩擦部沿椭圆轨迹运动。
21、本申请提供的超声波振子能够应用于超声波马达,当本申请提供的超声波振子被应用于超声波马达,可通过摩擦部与超声波马达的驱动部抵接,在摩擦部沿椭圆轨迹运动的过程中,摩擦部能够与驱动部之间产生摩擦力,在摩擦力的驱动下,使得驱动部产生运动。第一陶瓷片在输入第一交流信号或者第二交流信号后所伸长或收缩的幅度十分微小,第一陶瓷片的伸长或收缩的幅度通常在纳米级别,如此使得驱动部的运动幅度能够控制在纳米级别,有效提高了超声波马达的精度,并且摩擦部是直接抵接在驱动部上,通过摩擦力来带动驱动部运动的,因此,能够有效减小超声波马达工作过程中所产生的噪音。
22、本申请提供的超声波马达的有益效果在于:与现有技术相比,由于本申请提供的超声波马达包括上述任一技术方案提供的超声振子,因此本申请提供的超声波马达至少具有上述全部有益效果,在此不再赘述。
技术特征:
1.一种超声波振子,其特征在于,包括压电陶瓷部和摩擦部;
2.如权利要求1所述的超声波振子,其特征在于,所述压电陶瓷部还包括第二压电层组,所述第二压电层组连接于所述第一压电层组在所述第一方向上的一侧;所述第二压电层组包括多个第二信号电极片组和多个第二陶瓷片,多个所述第二信号电极片组沿所述第一方向间隔设置,各所述第二信号电极片组在所述第一方向上的相对两侧分别对应设置有所述第二陶瓷片;
3.如权利要求2所述的超声波振子,其特征在于,所述超声波振子还包括弹片,所述弹片具有相互连接的弹性部和夹持部,所述夹持部夹持于所述压电陶瓷部的相对两侧,所述弹性部位于所述压电陶瓷部背离所述摩擦部的一侧,所述弹性部用于抵接在超声波马达的壳体上。
4.如权利要求3所述的超声波振子,其特征在于,所述夹持部的数量为两个,两个所述夹持部分别与弹性部连接,且两个所述夹持部沿第四方向间隔设置,所述第二方向与所述第四方向呈夹角设置;在所述第四方向上,两个所述夹持部之间的距离等于所述压电陶瓷部在所述第四方向上的长度的40%~60%,并且在所述第四方向上,两个所述夹持部相对于所述压电陶瓷部的中心点对称设置。
5.如权利要求1所述的超声波振子,其特征在于,所述超声波振子还包括金属基体,所述金属基体连接于所述第一压电层组在所述第一方向上的一侧。
6.如权利要求5所述的超声波振子,其特征在于,所述摩擦部安装于所述金属基体背离所述第一压电层组的一侧。
7.如权利要求6所述的超声波振子,其特征在于,所述金属基体沿第五方向贯穿设置有条形孔,所述第五方向与所述第一方向呈夹角设置,所述条形孔的长度方向分别与所述第一方向和所述第五方向呈夹角设置。
8.如权利要求5所述的超声波振子,其特征在于,所述金属基体具有所述第一方向平行的周侧面,所述周侧面上凸出设置有金属弹片,所述金属弹片用于与超声波马达的壳体连接。
9.一种超声波马达,其特征在于,包括驱动部以及如权利要求1至8任一项所述的超声波振子,所述摩擦部与所述驱动部的表面抵接。
10.如权利要求9所述的超声波马达,其特征在于,所述超声波振子的数量为多个,多个所述超声波振子间隔设置,各所述超声波振子的所述摩擦部分别与所述驱动部的表面抵接。
技术总结
本申请适用于驱动设备技术领域,提供了一种超声波振子及超声波马达,超声波振子包括压电陶瓷部和摩擦部。压电陶瓷部包括第一压电层组,第一压电层组包括多个第一信号电极片组和第一陶瓷片,多个第一信号电极片组间隔设置。各第一信号电极片组的相对两侧分别设置有第一陶瓷片。第一信号电极片组包括第一信号电极片和第二信号电极片,第一信号电极片和第二信号电极片间隔设置。各第一陶瓷片接地,且分别与对应的第一信号电极片和第二信号电极片相贴,摩擦部安装于第一压电层组在第一方向上的一侧。摩擦部可沿椭圆轨迹运动并带动超声波马达的驱动部运动,从而使得超声波马达的驱动精度更高噪音更小,更适用于对微型产品的驱动。
技术研发人员:唐磊,何波,杨青松
受保护的技术使用者:深圳锐盟半导体有限公司
技术研发日:20240412
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!