一种输电线路巡检机器人防坠落装置的制作方法
本技术涉及输电线路巡检机器人的,特别是涉及一种输电线路巡检机器人防坠落装置。
背景技术:
1、巡线机器人是指以移动机器人作为载体,运用可见光摄像机、红外热成像仪、其他检测仪器作为载荷系统,以机器视觉—电磁场—gps—gis的多场信息融合作为机器人自主移动与自主巡检的导航系统,以嵌入式计算机作为控制系统的软硬件开发平台,具有障碍物检测识别与定位、自主作业规划、自主越障、对输电线路及其线路走廊自主巡检、巡检图像和数据的机器人本体自动存储与远程无线传输、地面远程无线监控与遥控、电能在线实时补给、后台巡检作业管理与分析诊断等功能,机器人巡检方式一般以导地线作为机器人的行进轨道,输电导线具有一定的弧度,在风的作用下会发生舞动,巡检机器人在舞动的导线上行进活动,容易导致输电线路巡检机器人上设有的夹持机构脱离导线,使输电线路巡检机器人迅速坠落,高压架空输电线路的导线与地面之间的距离一般在几十米,并且输电线路廊道环境恶劣、复杂,输电线路巡检机器人在坠落后会造成严重损坏。
2、现有的输电线路巡检机器人,例如申请号为cn202020935680.7的现有技术,包括装置箱、机器人主体、机器人机械臂、电缆线、保护拦网、固定支架、支撑柱、支撑内环和减震器等,保护拦网用于保护机器人主体,避免有高空抛掷物从上方对机器人主体造成损害,固定支架用于对装置箱的固定,组成的三角形固定支架具有稳固、坚定、耐压的特点,减震器用于对机器人主体的减震,减少外界冲击力对机器人主体的影响,防止巡检机器人的坠落,增加工作的安全性。
3、但是当巡检机器人发生坠落时,现有技术不便于对机器人进行自救,需要人工维修没事的效率比较低,并且现有技术不便于对脱线进行检测,使得实用性较低。
技术实现思路
1、为解决上述技术问题,本实用新型提供便于对坠落进行二次保护,并且便于自动对巡检机器人的坠落进行自动复位,提高实用性和便利性的一种输电线路巡检机器人防坠落装置。
2、本实用新型的一种输电线路巡检机器人防坠落装置,包括主体机构;还包括二次保护机构、伸缩机构、复位机构和固定机构,二次保护机构安装在主体机构上,伸缩机构安装在二次保护机构上,复位机构安装在伸缩机构上,固定机构安装在复位机构的底端,通过二次保护机构对坠落进行检测和二次保护,伸缩机构控制复位机构伸出,固定机构对线缆进行固定,复位机构支撑巡线机器人进行再次复位;当巡检机器人发生坠落时,通过二次保护机构对坠落进行检测和二次保护,提高实用性,伸缩机构控制复位机构伸出,通过复位机构控制固定机构对线缆进行固定,并且通过复位机构支撑巡线机器人进行再次复位,提高实用性和便利性。
3、优选的,主体机构包括巡检机器人、连接架和线缆,巡检机器人通过连接架挂在线缆上;通过连接架便于将巡检机器人安装在线缆上,并且通过巡检机器人对线缆进行巡检。
4、优选的,二次保护机构包括导向板、检测箱、压力传感器、滑动块和弹簧,导向板安装在巡检机器人的侧壁上,检测箱安装在导向板的顶端,压力传感器安装在检测箱的内壁,滑动块滑动安装在压力传感器内,弹簧的一端安装在滑动块上,弹簧的另一端安装在压力传感器上;当巡检机器人发生脱落时,线缆与滑动块接触,并且挤压滑动块使得滑动块在检测箱内滑动,进而使得弹簧收缩,通过弹簧的弹性对压力传感器进行挤压,通过压力传感器对压力进行检测,当压力传感器检测到压力异常时,控制伸缩机构、复位机构和固定机构将巡检机器人进行复位,提高实用性。
5、优选的,伸缩机构包括滑动套筒、两个滑动板、滑块、两个连杆和气缸,滑动套筒安装在检测箱的顶端,两个滑动板滑动安装在滑动套筒内,滑块滑动安装在滑动套筒内,两个连杆的一端转动安装在滑块上,两个连杆的另一端分别转动安装在两个滑动板上,气缸安装在滑动套筒的侧壁上,气缸的活动端与滑块连接;当巡检机器人发生脱落时,线缆与滑动块接触,并且挤压滑动块使得滑动块在检测箱内滑动,进而使得弹簧收缩,通过弹簧的弹性对压力传感器进行挤压,通过压力传感器对压力进行检测,当压力传感器检测到压力异常时,控制气缸推动滑块在滑动套筒内滑动,进而通过连杆推动滑动板在滑动套筒内滑动,便于复位机构和固定机构对巡检机器人进行复位。
6、优选的,复位机构包括滑动套筒、滑动杆、丝杠和电机,滑动套筒安装在滑动板的顶端,滑动杆滑动安装在滑动套筒内,丝杠转动安装在滑动套筒内,丝杠与滑动杆螺纹配合,电机安装在滑动套筒的顶端,电机的输出端与丝杠连接;通过打开电机带动丝杠转动,然后通过螺纹关系带动滑动杆在滑动套筒内滑动,进而便于固定机构对线缆进行固定支撑。
7、优选的,固定机构包括安装板、两个转动固定架和两个触发板,安装板安装在滑动杆的底端,两个转动固定架转动安装在安装板的底端,两个触发板安装在转动固定架上;通过打开电机带动丝杠转动,然后通过螺纹关系带动滑动杆在滑动套筒内滑动,进而带动转动固定架下降,通过触发板与线缆接触控制转动固定架围着转动固定架转动,进而控制电机继续带动丝杠转动,通过螺纹关系带动滑动杆在滑动套筒内滑动,进而将巡检机器人支撑起来,便于对巡检机器人进行复位。
8、优选的,巡检机器人的侧壁上设置有驱鸟刺;通过上述设置便于对鸟类进行驱赶,提高实用性。
9、与现有技术相比本实用新型的有益效果为:当巡检机器人发生坠落时,通过二次保护机构对坠落进行检测和二次保护,提高实用性,伸缩机构控制复位机构伸出,通过复位机构控制固定机构对线缆进行固定,并且通过复位机构支撑巡线机器人进行再次复位,提高实用性和便利性。
技术特征:
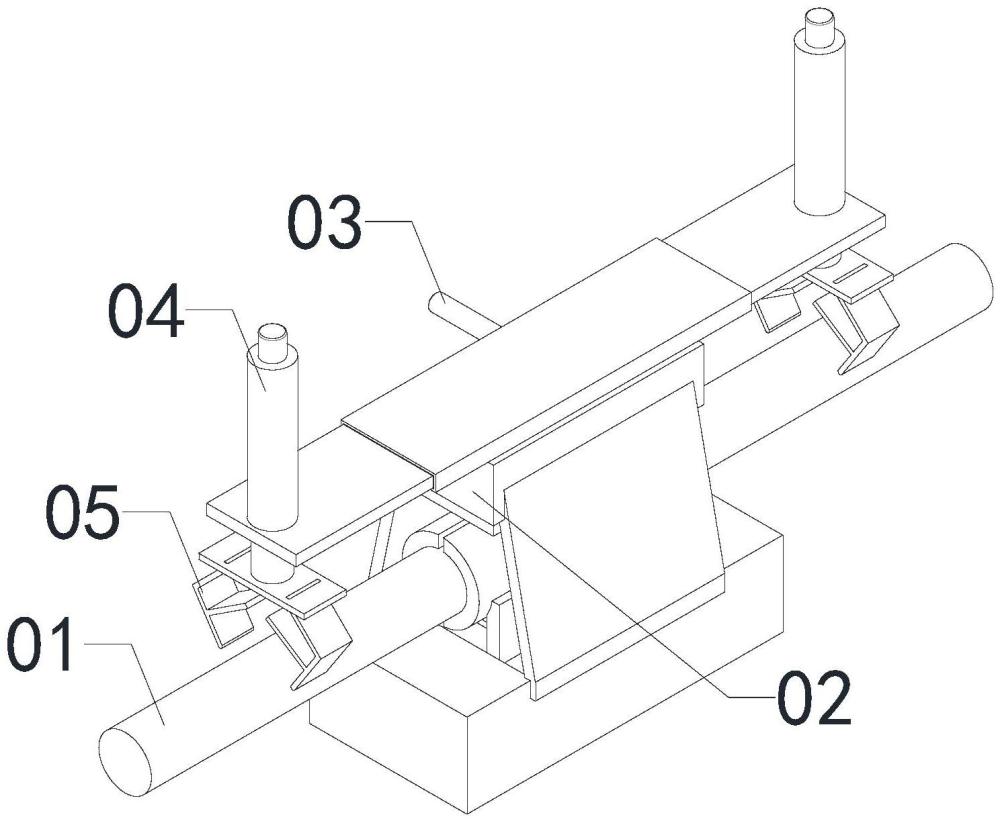
1.一种输电线路巡检机器人防坠落装置,包括主体机构(01);其特征在于,还包括二次保护机构(02)、伸缩机构(03)、复位机构(04)和固定机构(05),二次保护机构(02)安装在主体机构(01)上,伸缩机构(03)安装在二次保护机构(02)上,复位机构(04)安装在伸缩机构(03)上,固定机构(05)安装在复位机构(04)的底端;
2.如权利要求1所述的一种输电线路巡检机器人防坠落装置,其特征在于,主体机构(01)包括巡检机器人(11)、连接架(12)和线缆(13),巡检机器人(11)通过连接架(12)挂在线缆(13)上。
3.如权利要求2所述的一种输电线路巡检机器人防坠落装置,其特征在于,二次保护机构(02)包括导向板(21)、检测箱(22)、压力传感器(23)、滑动块(24)和弹簧(25),导向板(21)安装在巡检机器人(11)的侧壁上,检测箱(22)安装在导向板(21)的顶端,压力传感器(23)安装在检测箱(22)的内壁,滑动块(24)滑动安装在压力传感器(23)内,弹簧(25)的一端安装在滑动块(24)上,弹簧(25)的另一端安装在压力传感器(23)上。
4.如权利要求3所述的一种输电线路巡检机器人防坠落装置,其特征在于,伸缩机构(03)包括滑动套筒(31)、两个滑动板(32)、滑块(33)、两个连杆(34)和气缸(35),滑动套筒(31)安装在检测箱(22)的顶端,两个滑动板(32)滑动安装在滑动套筒(31)内,滑块(33)滑动安装在滑动套筒(31)内,两个连杆(34)的一端转动安装在滑块(33)上,两个连杆(34)的另一端分别转动安装在两个滑动板(32)上,气缸(35)安装在滑动套筒(31)的侧壁上,气缸(35)的活动端与滑块(33)连接。
5.如权利要求4所述的一种输电线路巡检机器人防坠落装置,其特征在于,复位机构(04)包括滑动套筒(41)、滑动杆(42)、丝杠(43)和电机(44),滑动套筒(41)安装在滑动板(32)的顶端,滑动杆(42)滑动安装在滑动套筒(41)内,丝杠(43)转动安装在滑动套筒(41)内,丝杠(43)与滑动杆(42)螺纹配合,电机(44)安装在滑动套筒(41)的顶端,电机(44)的输出端与丝杠(43)连接。
6.如权利要求5所述的一种输电线路巡检机器人防坠落装置,其特征在于,固定机构(05)包括安装板(51)、两个转动固定架(52)和两个触发板(53),安装板(51)安装在滑动杆(42)的底端,两个转动固定架(52)转动安装在安装板(51)的底端,两个触发板(53)安装在转动固定架(52)上。
7.如权利要求2所述的一种输电线路巡检机器人防坠落装置,其特征在于,巡检机器人(11)的侧壁上设置有驱鸟刺。
技术总结
本技术涉及输电线路巡检机器人的技术领域,特别是涉及一种输电线路巡检机器人防坠落装置,其便于对坠落进行二次保护,并且便于自动对巡检机器人的坠落进行自动复位,提高实用性和便利性;包括主体机构;还包括二次保护机构、伸缩机构、复位机构和固定机构,二次保护机构安装在主体机构上,伸缩机构安装在二次保护机构上,复位机构安装在伸缩机构上,固定机构安装在复位机构的底端,通过二次保护机构对坠落进行检测和二次保护,伸缩机构控制复位机构伸出,固定机构对线缆进行固定,复位机构支撑巡线机器人进行再次复位。
技术研发人员:张辉,徐晋梅,刘国华,孔娜,魏乃祥,张振宇,高广逊,郭亚鲁
受保护的技术使用者:山东光大线路器材有限公司
技术研发日:20240515
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!