机器人虚拟控制器
本发明涉及机器人相关,具体为机器人虚拟控制器。
背景技术:
1、机器人是自动控制机器(robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途,机器人虚拟控制器是发布命令的决策机构,是控制机器人执行命令的关键。
2、但是,现有的机器人虚拟控制器存在以下缺点:在工作时,虚拟控制器内部会产生大量的热量,现有的机器人虚拟控制器散热效果不佳,虚拟控制器的内部电子元件容易因为温度过高而影响工作的效率,且虚拟控制器的防尘效果不佳,容易进入大量灰尘,从而导致内部电子元件损毁,需要对其进行改进。
技术实现思路
1、本发明的目的在于提供机器人虚拟控制器,以解决上述背景技术中提到的现有的机器人虚拟控制器存在以下缺点:在工作时,虚拟控制器内部会产生大量的热量,现有的机器人虚拟控制器散热效果不佳,虚拟控制器的内部电子元件容易因为温度过高而影响工作的效率,且虚拟控制器的防尘效果不佳,容易进入大量灰尘,从而导致内部电子元件损毁的问题。
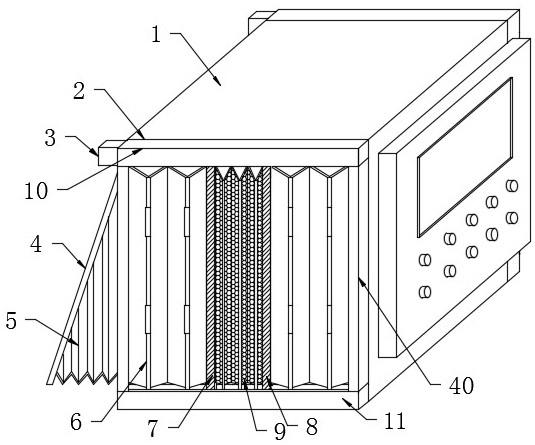
2、为实现上述目的,本发明提供如下技术方案:机器人虚拟控制器,包括控制器主体,所述控制器主体两侧壁上均设有防尘散热框架,所述防尘散热框架包括上固定座、下固定座和侧固定座,所述上固定座、下固定座分别固定安装在控制器主体一侧壁的上端、下端,所述侧固定座安装在上固定座、下固定座之间,所述防尘散热框架上设有第一滑板和第二滑板,所述下固定座、上固定座上分别设有第一滑槽、第二滑槽,所述第一滑板的底端和上端一侧均设有第二滑块,且第一滑板两端均通过第二滑块分别与第一滑槽、第二滑槽滑动连接,所述第二滑板与第一滑板结构相同,所述第一滑板和第二滑板之间设有第二折叠防尘网,所述第一滑板一侧与侧固定座之间设有防尘板组,所述第二滑板与侧固定座之间也设有防尘板组,所述第二折叠防尘网和防尘板组均与防尘散热框架滑动连接。
3、优选的,所述上固定座内部设有第一传动丝杆和第二传动丝杆,所述第一传动丝杆一端与第二传动丝杆一端固定连接,所述第二传动丝杆另一端与上固定座一侧内壁转动连接,所述第一传动丝杆另一端与上固定座一侧外壁上设有的电机的输出轴固定连接,所述第一传动丝杆、第二传动丝杆上分别安装有第一丝杆螺母、第二丝杆螺母,所述第一滑板、第二滑板顶端分别与第一丝杆螺母、第二丝杆螺母固定连接,所述第一传动丝杆上的纹路和第二传动丝杆上的纹路呈反向设置。
4、优选的,所述防尘板组包括第一防尘板和第二防尘板,所述第一防尘板和第二防尘板之间通过第一连接杆铰连,所述防尘板组设有多组,且相邻两组防尘板组之间通过第二连接杆铰连,所述第一连接杆底端和第二连接杆两端均连接有第一滑块,所述第一连接杆通过第一滑块与第一滑槽滑动连接,所述第二连接杆两端均通过第一滑块分别与第一滑槽、第二滑槽滑动连接。
5、优选的,所述第二折叠防尘网上设有折叠架,所述折叠架两端均设有第三滑块,且折叠架两端均通过第三滑块分别与第一滑槽、第二滑槽滑动连接。
6、优选的,所述下固定座上端设有第一防尘条,所述上固定座下端设有第二防尘条。
7、优选的,所述控制器主体一侧活动安装有活动后盖板,且活动后盖板一侧内壁上通过复位弹簧与控制器主体内部固定连接,所述活动后盖板两侧与控制器主体内壁上均固定连接有第一折叠防尘网,所述活动后盖板上方设有收纳腔,所述收纳腔内部设有收卷轴,所述收卷轴上固定安装有收卷筒,所述收卷筒上缠绕设有牵引绳,所述牵引绳一端延伸位于收纳腔外部并与活动后盖板上设有的连接块固定连接。
8、优选的,所述收纳腔内部设有转轴,所述转轴上连接有传动皮带,所述传动皮带另一端与电机的输出轴连接,所述转轴上固定安装有第一锥齿轮,所述第一锥齿轮啮合连接有第二锥齿轮,所述第二锥齿轮固定套设在收卷轴上。
9、优选的,所述控制器主体内部顶端设有两组散热风扇,且控制器主体两侧均开设有散热窗口,所述散热窗口位于防尘散热框架一侧。
10、本发明提供了机器人虚拟控制器,具备以下有益效果:
11、(1)本发明通过在控制器主体两侧均设有防尘散热框架,并在防尘散热框架上设有防尘板组和第二折叠防尘网,可以在需要对控制器主体进行散热时,启动电机,利用电机正向转动带动第一传动丝杆和第二传动丝杆同步转动,从而使第一滑板和第二滑板相背运动,从而将防尘板组进行折叠,同时将第二折叠防尘网展开,从而可以扩大散热空间,散热效果好,同时可以在不用时,使第一滑板和第二滑板相向运动,使第二折叠防尘网折叠,同时使防尘板组展开进行防尘工作,防尘效果好,便于使用。
12、(2)本发明通过在控制器主体一侧设有活动后盖板,并在活动后盖板的两侧与控制器主体之间设有第一折叠防尘网,同时在后盖板上设有收纳腔,并将转轴通过传动皮带与电机的输出轴连接,可以在散热时,利用电机正向转动,使传动皮带带动转轴转动,转轴通过第一锥齿轮啮合第二锥齿轮转动,从而使手卷轴转动,收卷轴转动的同时通过收卷筒对牵引绳进行收卷,从而将活动后盖板打开,同时第一折叠防尘网展开,可以进一步扩大散热空间,快速散热,散热效果好,便于使用,同时在不用进行散热时,收卷筒放线,复位弹簧拉动活动后盖板复位,进行防尘工作,操作简单,便于使用。
技术特征:
1.机器人虚拟控制器,其特征在于,包括控制器主体(1),所述控制器主体(1)两侧壁上均设有防尘散热框架(2),所述防尘散热框架(2)包括上固定座(10)、下固定座(11)和侧固定座(40),所述上固定座(10)、下固定座(11)分别固定安装在控制器主体(1)一侧壁的上端、下端,所述侧固定座(40)安装在上固定座(10)、下固定座(11)之间,所述防尘散热框架(2)上设有第一滑板(7)和第二滑板(8),所述下固定座(11)、上固定座(10)上分别设有第一滑槽(20)、第二滑槽(21),所述第一滑板(7)的底端和上端一侧均设有第二滑块(22),且第一滑板(7)两端均通过第二滑块(22)分别与第一滑槽(20)、第二滑槽(21)滑动连接,所述第二滑板(8)与第一滑板(7)结构相同,所述第一滑板(7)和第二滑板(8)之间设有第二折叠防尘网(9),所述第一滑板(7)一侧与侧固定座(40)之间设有防尘板组(6),所述第二滑板(8)与侧固定座(40)之间也设有防尘板组(6),所述第二折叠防尘网(9)和防尘板组(6)均与防尘散热框架(2)滑动连接。
2.根据权利要求1所述的机器人虚拟控制器,其特征在于:所述上固定座(10)内部设有第一传动丝杆(12)和第二传动丝杆(13),所述第一传动丝杆(12)一端与第二传动丝杆(13)一端固定连接,所述第二传动丝杆(13)另一端与上固定座(10)一侧内壁转动连接,所述第一传动丝杆(12)另一端与上固定座(10)一侧外壁上设有的电机(3)的输出轴固定连接,所述第一传动丝杆(12)、第二传动丝杆(13)上分别安装有第一丝杆螺母(14)、第二丝杆螺母(15),所述第一滑板(7)、第二滑板(8)顶端分别与第一丝杆螺母(14)、第二丝杆螺母(15)固定连接,所述第一传动丝杆(12)上的纹路和第二传动丝杆(13)上的纹路呈反向设置。
3.根据权利要求1所述的机器人虚拟控制器,其特征在于:所述防尘板组(6)包括第一防尘板(16)和第二防尘板(17),所述第一防尘板(16)和第二防尘板(17)之间通过第一连接杆(18)铰连,所述防尘板组(6)设有多组,且相邻两组防尘板组(6)之间通过第二连接杆(27)铰连,所述第一连接杆(18)底端和第二连接杆(27)两端均连接有第一滑块(19),所述第一连接杆(18)通过第一滑块(19)与第一滑槽(20)滑动连接,所述第二连接杆(27)两端均通过第一滑块(19)分别与第一滑槽(20)、第二滑槽(21)滑动连接。
4.根据权利要求1所述的机器人虚拟控制器,其特征在于:所述第二折叠防尘网(9)上设有折叠架(23),所述折叠架(23)两端均设有第三滑块(24),且折叠架(23)两端均通过第三滑块(24)分别与第一滑槽(20)、第二滑槽(21)滑动连接。
5.根据权利要求1所述的机器人虚拟控制器,其特征在于:所述下固定座(11)上端设有第一防尘条(25),所述上固定座(10)下端设有第二防尘条(26)。
6.根据权利要求1所述的机器人虚拟控制器,其特征在于:所述控制器主体(1)一侧活动安装有活动后盖板(4),且活动后盖板(4)一侧内壁上通过复位弹簧(33)与控制器主体(1)内部固定连接,所述活动后盖板(4)两侧与控制器主体(1)内壁上均固定连接有第一折叠防尘网(5),所述活动后盖板(4)上方设有收纳腔(32),所述收纳腔(32)内部设有收卷轴(37),所述收卷轴(37)上固定安装有收卷筒(38),所述收卷筒(38)上缠绕设有牵引绳(30),所述牵引绳(30)一端延伸位于收纳腔(32)外部并与活动后盖板(4)上设有的连接块(31)固定连接。
7.根据权利要求1所述的机器人虚拟控制器,其特征在于:所述收纳腔(32)内部设有转轴(34),所述转轴(34)上连接有传动皮带(39),所述传动皮带(39)另一端与电机(3)的输出轴连接,所述转轴(34)上固定安装有第一锥齿轮(35),所述第一锥齿轮(35)啮合连接有第二锥齿轮(36),所述第二锥齿轮(36)固定套设在收卷轴(37)上。
8.根据权利要求1所述的机器人虚拟控制器,其特征在于:所述控制器主体(1)内部顶端设有两组散热风扇(28),且控制器主体(1)两侧均开设有散热窗口(29),所述散热窗口(29)位于防尘散热框架(2)一侧。
技术总结
本发明公开了机器人虚拟控制器,包括控制器主体,所述控制器主体两侧壁上均设有防尘散热框架,所述防尘散热框架包括上固定座、下固定座和侧固定座,所述上固定座、下固定座分别固定安装在控制器主体一侧壁的上端、下端,所述侧固定座安装在上固定座、下固定座之间,所述防尘散热框架上设有第一滑板和第二滑板。本发明通过在控制器主体两侧均设有防尘散热框架,可以在散热时,使使第一滑板和第二滑板相背运动,将防尘板组进行折叠,同时将第二折叠防尘网展开,从而可以扩大散热空间,散热效果好,不用时,使第一滑板和第二滑板相向运动,使第二折叠防尘网折叠,同时使防尘板组展开进行防尘工作,防尘效果好,便于使用。
技术研发人员:胡安斌,要小鹏,王婧
受保护的技术使用者:西南医科大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!