一种基于自动驾驶AGV域控制器的总成的制作方法
本技术涉及自动驾驶车辆的域控制器,具体而言,涉及一种基于自动驾驶agv域控制器的总成。
背景技术:
1、近年来随着科学技术的发展,汽车的电动化和智能化程度不断提升,汽车中的电子控制单元(ecu)数量激增,据了解,仅针对一种车型的ecu数量已从几款增至百余款,增加ecu的数量种类并非良策,并且不同ecu来自不同厂商,对后期整车功能的开发和维护产生繁琐的影响,此背景下,传统整车电气架构出现演变趋势,原本独立工作的ecu相互融合,分组集中控制的目标使得域控制器应运而生。
2、域控制器的出现使原有的感知、算法、ecu捆绑开发模式发生改变,可以利用多传感器感知的数据与控制器计算平台进行融合,能使车辆更加安全、准确、高效的产生决策。目前,域控制器主要有两种分类方式:按区域分和按功能分。按区域可具体分为前区域控制器、左区域控制器、右区域控制器等但由于集中度高,技术难度大等原因很少有企业配备这种方式的域控制器;按功能分主要有动力域控制器、底盘域控制器、车身域控制器、座舱域控制器、自动驾驶域控制器等。
3、面对复杂多变的未知路况,自动驾驶车辆需要搭载多种传感器进行数据采集和处理工作,这就需要域控制器具有足够强大的运算能力,并且在控制器工作过程中难免会产生热量,所以域控制器的散热能力会影响其工作的实效性。此外,域控制器被安装与车体,其面临的工作环境是否恶劣、工作性能是否稳定等这统统需要考虑。由此,为了解决自动驾驶域控制器的实效性、稳定性、可靠性、散热性,满足控制器的工作、性能要求,亟需一种基于自动驾驶域控制器的总成设计方式来解决如上问题。
技术实现思路
1、为了解决以上技术问题,本实用新型提出一种基于自动驾驶agv域控制器的总成,用来提升域控制器的实效性、稳定性、可靠性等,便于满足车辆正常高效运转的使用要求。
2、为实现上述目的,本实用新型提出的总成设计具体按照如下两个方面实施:一方面为外层设计,外层设计围绕上壳体与底板进行外壳设计、加工工艺、制造材料选取等方面进行;另一方面为内层设计,其主要对pcb电路板的软件开发、通讯连接、防护等方面进行设计。
3、优选的,所述上壳体的表面设置排列均匀的格栅,将统一的表面分隔成若干区域,满足空气动力学和空气流动性的要求,对域控制器表面进行散热。
4、优选的,所述上壳体表面加装两个风扇,其置于pcb电路板正上方便于处理器的散热,所述风扇外固定两个防护罩,起到对扇叶保护和防尘的作用。
5、优选的,所述风扇配置高灵活度轴承,并且由pcb电路板上的芯片均匀控制转速,从而对风扇降噪,实现无声运转。
6、优选的,所述上壳体采用四个螺栓孔与底板相互连接,其位置均匀分布。便于安装的同时又能实现牢固结合。
7、优选的,所述上壳体预留出can口、usb口、以太网接口、rs232接口、电源接口放置空间,以实现所述上壳体和底板紧密结合。
8、优选的,所述底板采取底面平铺式设计,可以实现与车体牢固连接。
9、优选的,所述底板内侧放置抗震软垫,并且内置两个螺栓柱体便于固定pcb电路板。
10、优选的,所述上壳体与底板结合处放置橡胶密封垫片。
11、优选的,所述pcb电路板搭载xavier双模处理器和英飞凌tc297处理器,双处理器构成异构计算平台,搭载自动驾驶系统,为无人车辆提供安全、可靠的自动驾驶功能。
12、优选的,所述pcb电路板设置can口、usb口、以太网接口、rs232接口。所述can口设计中,在can接收器和收发器中间设置光电隔离电路;所述usb口设计,采用串行总线差分线,并设置线有完整的参考平面,且设置回流地过孔;所述以太网接口,在每对差分信号线设计100欧阻抗,并减少信号线最大长度差。所述rs232接口采用负逻辑传送,并且可灵活选择传输的波特率。
13、优选的,所述域控制器才用ip67材质,其工作温度可适用于极端环境,所述pcb电路板运算能力强,采用低功耗设计,满足3级以上电磁兼容和环境标准。
14、与现有技术相比,本实用新型的有益效果是:
15、1.该自动驾驶agv域控制器采用xavier双模处理器和英飞凌tc297处理器,双处理器构成异构计算平台,具备can、usb、以太网、rs232等丰富接口,集成了多种通讯、5g、交换机、视频等模块。通过搭载无人驾驶系统,能够实现为无人车辆提供全部、安全、可靠的自动驾驶功能。
16、2.该自动驾驶agv域控制器采用ip67材质,能适应各种扬尘、高温、沿海等气候。其工作温度满足各种极低温、高温环境。并且该控制器采取低功耗设计,增加续航能力的同时又能满足散热要求。此外,本控制器满足3级以上电磁兼容和环境标准,满足各种严酷环境下的可靠稳定工作。
17、3.该自动驾驶agv域控制器的算法可以融合激光雷达、毫米波雷达、摄像头、gps、惯导等车载传感器感知的数据,所进行的算法处理涵盖感知、决策、控制三个层面,最终传送至执行机构。其算法主要包括多传感器数据融合算法(目标融合、特征融合、信号融合)、自动驾驶决策算法设计(基于神经网络、基于规则、混合路线、点到点等)、精准控制算法(pid调节、模型预测、qp二次规划、lqr线性二次型)、软件安全功能与保障自动驾驶软件安全、整体的自动驾驶结构化和轻量化升级等。
18、4.该自动驾驶agv域控制器采用双处理器运算平台,该平台具备冗余机制,在域控制器中设立两个独立的运算单元,其中一个单元进行决策处理,另一个单元进行备份;当一个单元失效时,另一个单元也会进行决策算法处理。
技术特征:
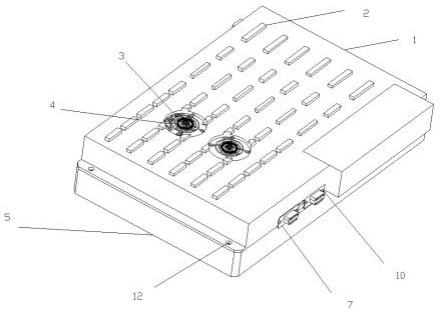
1.一种基于自动驾驶agv域控制器的总成,主要包括上壳体(1)、底板(5)、pcb电路板(6)、螺栓孔(12)和螺栓柱体(13),其特征在于:所述上壳体(1)通过四个螺栓孔(12)与底板(5)相互配合连接,并且在上壳体(1)和底板(5)之间夹持着pcb电路板(6),所述pcb电路板(6)通过两个螺栓柱体(13)固定在底板(5)上。
2.根据权利要求1所述一种基于自动驾驶agv域控制器的总成,其特征在于:所述上壳体(1)上有排列均匀的格栅(2),并且在上壳体(1)中有两个风扇(3),所述风扇(3)外侧分别安装两个防护罩(4)。
3.根据权利要求2所述一种基于自动驾驶agv域控制器的总成,其特征在于:所述上壳体(1)的侧边外端预留有can口(7)、usb口(8)、以太网接口(9)和rs232接口(10)。
4.根据权利要求1所述一种基于自动驾驶agv域控制器的总成,其特征在于:所述底板(5)底面平铺式结构,通过四个螺栓孔与上壳体(1)固定,pcb电路板(6)的下方平铺有抗震软垫(14),且抗震软垫(14)借助两个螺栓柱体(13)固定在pcb电路板(6)上。
5.根据权利要求1所述一种基于自动驾驶agv域控制器的总成,其特征在于:所述pcb电路板(6)搭载can口(7)、usb口(8)、以太网接口(9)、rs232接口(10),并且所述pcb电路板(6)由电源接口(11)进行供电。
6.根据权利要求1所述一种基于自动驾驶agv域控制器的总成,其特征在于:所述pcb电路板(6)搭载xavier双模处理器和英飞凌tc297处理器,双处理器构成异构计算平台,通过上壳体(1)预留的can口(7)、usb口(8)、以太网接口(9)、rs232接口(10)与5g、交换机进行通讯。
7.根据权利要求1所述一种基于自动驾驶agv域控制器的总成,其特征在于:所述域控制器总成实行ip67防护结构。
技术总结
本技术提出一种基于自动驾驶AGV域控制器的总成,具体部件主要有域控制器的上盖、PCB电路板、底板等。其中该域控制器的上盖和底板由铝合金工艺制成,它们通过4个螺栓与底板进行连接,便于该控制器安全高效应用于复杂环境下,上盖设有两处风扇与多处格栅用于域控制器的散热,底板平铺式设计更加贴合于安装环境,方便牢固装放在车体或台架,PCB电路板搭载Xavier双模处理器和英飞凌TC297处理器,双处理器构成异构计算平台,能够实现更高效的工作效率,加快传感器、处理器、执行器之间的运算交流,同时具备CAN、USB、以太网、RS232等丰富接口,集成多种通讯、5G、交换机、视频等模块,便于刷写无人驾驶程序,提供安全高效的自动驾驶功能。
技术研发人员:肖飞,闫在伟,孔维跃,刘威风,肖鹏
受保护的技术使用者:苏州云疆智能科技有限公司
技术研发日:20230314
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!