一种用于电动底盘车驱动器的控制器复位电路的制作方法
本技术公开了一种控制器复位电路,属于电动底盘车驱动器,具体涉及一种用于电动底盘车驱动器的控制器复位电路。
背景技术:
1、电动底盘车控制器能实现对电动底盘车的控制和保护,具有远方和就地两种操作模式。控制器具有分段过流保护、摇入/摇出、远方遥控控制功能、故障报警输出、倒车时间设置等功能,分段过流保护根据断路器摇进特性设定不同的电流保护值;控制器可在电动底盘车驱动电机运转受阻(如安装不到位或摇入工作位置及摇出工作位出现机构卡死)达到保护条件时立即对电机制动,并逆向驱动电机解除闷车卡死状态,并且不影响底盘手动摇进工作位置;控制器具有点动操作的功能,通过摇入摇出键,实现点动操作电机缓慢旋转,解除闷车卡死状态。
2、在传统的控制器中每个控制器都需要配备复位模块,因为在系统上电时,需要功能单元可能处于混乱状态,从而导致系统的误动作。为此,上电复位电路常用来初始化这些功能单元,保证系统的正常启动;但现有的复位电路在缓慢上电时起拉电压较小,可能影响系统的正常复位。
技术实现思路
1、实用新型目的:提供一种用于电动底盘车驱动器的控制器复位电路,解决上述提到的问题。
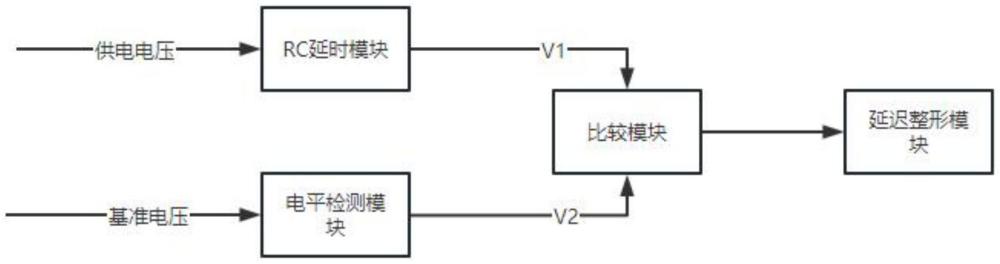
2、技术方案:一种用于电动底盘车驱动器的控制器复位电路,所述复位电路包括:rc延时模块、电平检测模块、比较模块和延迟整形模块;
3、所述rc延时模块用于对输入电压进行快速上电,并产生起拉电压;
4、所述电平检测模块用于为了保证复位信号的形成,使基准电压必须在供电电压稳定之前及时升起来;
5、比较模块,用于比对rc延时模块和电平检测模块并输出复位信号;
6、延迟整形模块对叠加后的复位信号进行毛刺处理和波形整理,最终输出复位信号。
7、在进一步的实施例中,所述rc延时模块和所述电平检测模块采用并联方式与所述比较模块的输入端连接,所述比较模块的输出端与所述延迟整形模块的输入端连接。
8、在进一步的实施例中,所述rc延时模块包括:mos管q1、mos管q2、mos管q8、mos管q9、mos管q10和反相器u1a;
9、所述mos管q1的源极输入供电电压,所述mos管q1的漏极和所述mos管q8的源极连接,所述mos管q1的栅极同时与所述mos管q8的栅极和漏极、所述mos管q10的栅极、所述mos管q9的栅极和源极和所述反相器u1a的输入端连接,所述mos管q9的漏极输入电压,所述mos管q10的源极和漏极接地,所述mos管q2的源极和漏极输入电压、栅极与所述反相器u1a的输出端连接且输出电压。
10、在进一步的实施例中,所述电平检测模块包括:mos管q3、mos管q4、mos管q5、mos管q6、mos管q11、mos管q13、mos管q14、电阻r1和电阻r2;
11、所述mos管q3的源极输入电压、漏极同时与所述mos管q11的漏极和所述mos管q4的栅极连接,所述mos管q3的栅极和所述mos管q11的栅极连接,所述mos管q11的源极接地,所述mos管q4的源极输入电压、漏极同时与所述mos管q5的源极和所述mos管q6的源极连接,所述mos管q5的栅极输入基准电压,所述mos管q5的漏极同时与所述mos管q13的漏极和栅极和所述mos管q14的栅极连接,所述mos管q13的源极接地,所述mos管q14的源极接地,所述mos管q6的漏极与所述mos管q14的源极连接且输出电压,所述mos管q6的栅极同时与所述电阻r1的一端和所述电阻r2的一端连接,所述电阻r1的一端输入电压,所述电阻r2的另一端接地。
12、在进一步的实施例中,所述比较模块包括反相器u1b、反相器u1c和与门u2a;
13、所述反相器u1别的输入端与所述rc延时模块的输出端连接,所述反相器u1c的输入端与所述电平检测模块的输出端连接,所述与门u2a的输入端分别与所述反相器u1b的输出端和所述反相器u1c的输出端连接。
14、在进一步的实施例中,所述延迟整形模块包括:反相器u1d、反相器u1e、反相器u1f反相器u3a、mos管q7和mos管q12;
15、所述反相器u1d输入端与所述比较模块的输出端连接,所述比较模块的输出端同时与所述反相器u1e的输入端和所述mos管q7的栅极连接,所述mos管q7的源极和漏极输入电压,所述反相器u1e的输出端同时与所述反相器u1f的输入端和所述mos管q12的栅极连接,所述mos管q12的源极和漏极接地,所述反相器u3a的输入端与所述反相器u1f的输出端连接,所述反相器u3a的输出端输出电压。
16、在进一步的实施例中,反相器的型号为74als04,与门型号为74ls08。
17、有益效果:本实用新型公开了一种控制器复位电路,属于电动底盘车驱动器技术领域,具体涉及一种用于电动底盘车驱动器的控制器复位电路,包括:rc延时模块、电平检测模块、比较模块和延迟整形模块;所述rc延时模块用于对输入电压进行快速上电,并产生起拉电压;所述电平检测模块用于为了保证复位信号的形成,使基准电压必须在供电电压稳定之前及时升起来;比较模块,用于比对rc延时模块和电平检测模块并输出复位信号;延迟整形模块对叠加后的复位信号进行毛刺处理和波形整理,最终输出复位信号,本实用新型本文同时使用基于rc延时和基于电平检测的上电复位模块,并对二者的输出电压进行操作,即复位信号叠加在一起,并利用延迟整形模块对叠加后的复位信号进行毛刺处理和波形整理,最终输出干净陡峭的复位信号。
技术特征:
1.一种用于电动底盘车驱动器的控制器复位电路,其特征在于,所述复位电路包括:rc延时模块、电平检测模块、比较模块和延迟整形模块;
2.根据权利要求1所述一种用于电动底盘车驱动器的控制器复位电路,其特征在于,所述rc延时模块和所述电平检测模块采用并联方式与所述比较模块的输入端连接,所述比较模块的输出端与所述延迟整形模块的输入端连接。
3.根据权利要求2所述一种用于电动底盘车驱动器的控制器复位电路,其特征在于,所述rc延时模块包括:mos管q1、mos管q2、mos管q8、mos管q9、mos管q10和反相器u1a;
4.根据权利要求2所述一种用于电动底盘车驱动器的控制器复位电路,其特征在于,所述电平检测模块包括:mos管q3、mos管q4、mos管q5、mos管q6、mos管q11、mos管q13、mos管q14、电阻r1和电阻r2;
5.根据权利要求2所述一种用于电动底盘车驱动器的控制器复位电路,其特征在于,所述比较模块包括反相器u1b、反相器u1c和与门u2a;
6.根据权利要求2所述一种用于电动底盘车驱动器的控制器复位电路,其特征在于,所述延迟整形模块包括:反相器u1d、反相器u1e、反相器u1f反相器u3a、mos管q7和mos管q12;
技术总结
本技术公开了一种控制器复位电路,属于电动底盘车驱动器技术领域,具体涉及一种用于电动底盘车驱动器的控制器复位电路,包括:RC延时模块、电平检测模块、比较模块和延迟整形模块;所述RC延时模块用于对输入电压进行快速上电,并产生起拉电压;所述电平检测模块用于为了保证复位信号的形成,使基准电压必须在供电电压稳定之前及时升起来;本技术本文同时使用基于RC延时和基于电平检测的上电复位模块,并对二者的输出电压进行操作,即复位信号叠加在一起,并利用延迟整形模块对叠加后的复位信号进行毛刺处理和波形整理,最终输出干净陡峭的复位信号。
技术研发人员:毕玉玺,刘松艳,林晓婕
受保护的技术使用者:无锡奕帆微电子有限公司
技术研发日:20230801
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!