一种基于可控LED阵列的距离感应控制方法与流程
本发明涉及led智能控制,具体涉及一种基于可控led阵列的距离感应控制方法。
背景技术:
1、测距是指通过各类传感器检测物体与物体之间的距离,常用的有超声波测距、毫米波测距、激光测距以及摄像头测距等,其中除摄像头测距外的几种测距方式都依赖于专用测距传感器,成本很高,如何使用摄像头的画面进行距离的测算一直是一个研发热点。
2、在车库内倒车时,由于车辆之间、车辆与其它物体之间的距离往往较近,需要时刻注意车辆距离,防止车辆的刮蹭。专用测距传感器的准确性较高,但是作用面很窄,需要设置多个传感器才能实现一个面(如车辆的正面、背面或者侧面)的测距,而摄像头具有拍摄面宽、成本低的特点,如何利用摄像头更准确地测量距离是需要解决的问题。
技术实现思路
1、为了克服现有技术中存在的缺点和不足,本发明的目的在于提供一种基于可控led阵列的距离感应控制方法,解决了汽车倒车测距需要多个距离传感器导致成本过高的问题。
2、本发明是通过以下技术方案实现的:
3、一种基于可控led阵列的距离感应控制方法,包括以下步骤:
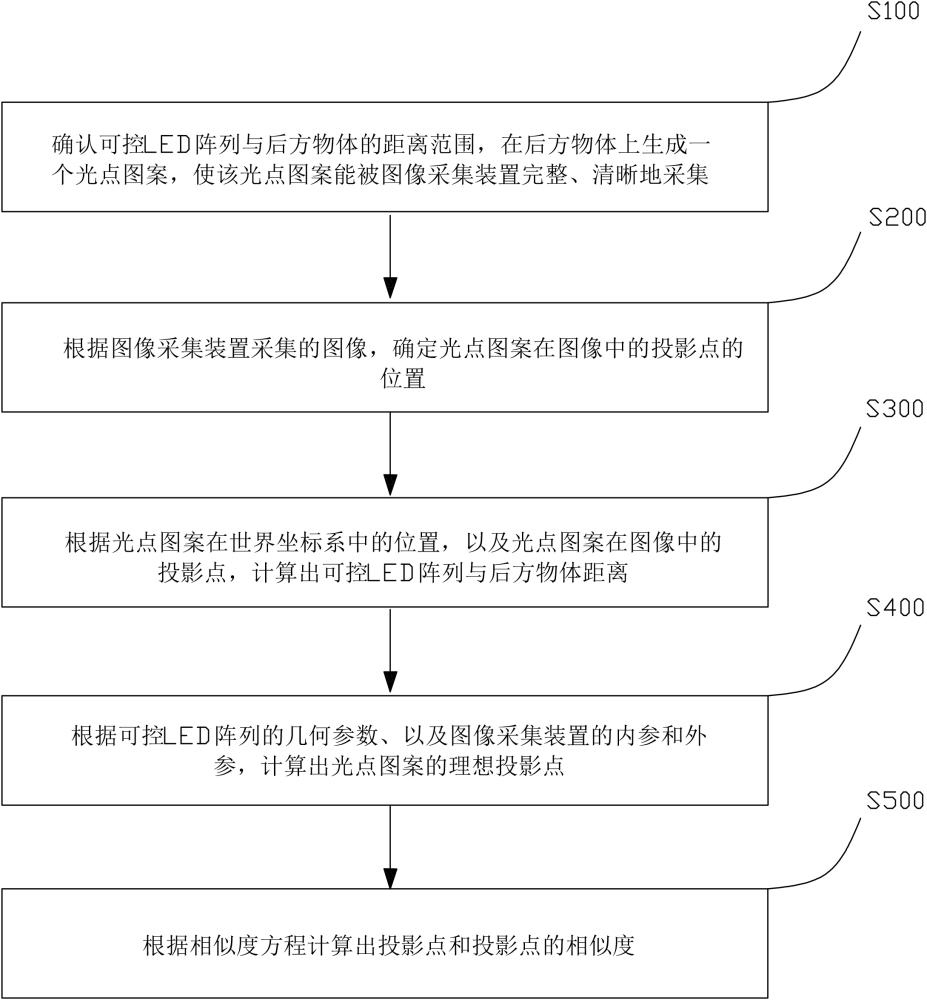
4、s100. 确认可控led阵列与后方物体的距离范围,在后方物体上生成一个光点图案,使该光点图案能被图像采集装置完整、清晰地采集;
5、s200. 根据图像采集装置采集的图像,确定光点图案在图像中的投影点的位置;
6、s300. 根据光点图案在世界坐标系中的位置,以及光点图案在图像中的投影点,计算出可控led阵列与后方物体的距离。
7、结合第一方面,进一步的,步骤s200包括:
8、s201. 将图像采集装置采集的图像的像素大小确认为可控led阵列的光点图案;
9、s202. 确认光点图案的齐次坐标,将该齐次坐标确认为投影点的坐标。
10、结合第一方面,进一步的,步骤s300包括:
11、s301. 将投影点的坐标转换为像素坐标;
12、s302. 将像素坐标转换为世界坐标。
13、结合第一方面,进一步的,在步骤s301中,像素坐标的计算方法为:
14、;
15、其中,和分别表示投影点在图像中的横坐标和纵坐标,、和 分别表示投影点的、和坐标。
16、结合第一方面,进一步的,在步骤s302中,世界坐标的计算方法为:
17、;
18、其中,是光点图案在世界坐标系中的位置,是摄像头的旋转矩阵,是摄像头的内参矩阵,是摄像头的平移向量,和分别表示投影点在图像中的横坐标和纵坐标。
19、结合第一方面,进一步的,在步骤s300中,将可控led阵列的中心点的坐标表示为齐次坐标,可控led阵列与后方物体的距离的计算方法为:
20、;
21、其中,是可控led阵列与后方物体的距离,是光点图案在世界坐标系中的位置,是可控led阵列的中心点的坐标,、和分别表示光点图案的、和坐标,,和分别表示可控led阵列的中心点的 、和坐标。
22、结合第一方面,进一步的,还包括步骤s400:根据可控led阵列的几何参数、以及图像采集装置的内参和外参,计算出光点图案的理想投影点,该计算方法为:
23、 ;
24、其中,是光点图案在图像中的理想投影点,是摄像头的内参矩阵,是摄像头的旋转矩阵,是可控led阵列的矩阵,是摄像头的平移向量。
25、结合第一方面,进一步的,还包括步骤s500:根据相似度方程计算出投影点和投影点的相似度,相似度方程的计算方法如下:
26、;
27、其中,是理想的投影点,是实际的投影点,表示点乘,表示范数。
28、第二方面,本发明提供了使用了上述控制方法的装置,其包括:
29、多个可独立控制、并具有多种颜色及亮度的可控led阵列;
30、图像采集装置,用于获取可控led阵列与后方物体反射或折射后的图像信息,以获取当前可控led阵列与后方物体的相对位置及距离信息;
31、辅助显示模块,用于根据图像采集装置采集的图像信息,计算出可控led阵列与后方物体的距离,并以数字、图形或者声音的方式输出该距离信息;
32、距离感应控制模块,根据可控led阵列与后方物体距离的大小,调整可控led阵列的亮灭状态。
33、第三方面,所述存储介质用于存储指令;
34、所述处理器用于根据所述指令进行操作以执行如上所述方法的步骤。
35、本发明的有益效果:
36、本发明的一种基于可控led阵列的距离感应控制方法,该方法可以通过可控led阵列的光点图案,提供一种人工标记,增强图像的特征,无需使用多个距离传感器即可提高图像的识别率和测距精度,相比于现有的测距方法以及专用测距传感器,具有成本低、安装方便、覆盖面广、准确性高等特点。
技术特征:
1.一种基于可控led阵列的距离感应控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于可控led阵列的距离感应控制方法,其特征在于,步骤s200包括:
3.根据权利要求2所述的一种基于可控led阵列的距离感应控制方法,其特征在于,步骤s300包括:
4.根据权利要求3所述的一种基于可控led阵列的距离感应控制方法,其特征在于,在步骤s301中,像素坐标的计算方法为:
5.根据权利要求4所述的一种基于可控led阵列的距离感应控制方法,其特征在于,在步骤s302中,世界坐标的计算方法为:
6.根据权利要求5所述的一种基于可控led阵列的距离感应控制方法,其特征在于,在步骤s300中,将可控led阵列的中心点的坐标表示为齐次坐标,可控led阵列与后方物体的距离的计算方法为:
7.根据权利要求5所述的一种基于可控led阵列的距离感应控制方法,其特征在于,还包括步骤s400:根据可控led阵列的几何参数、以及图像采集装置的内参和外参,计算出光点图案的理想投影点,该计算方法为:
8.根据权利要求7所述的一种基于可控led阵列的距离感应控制方法,其特征在于,还包括步骤s500:根据相似度方程计算出投影点和投影点的相似度,相似度方程的计算方法如下:
9.一种计算机设备,其特征在于,
技术总结
本发明涉及LED智能控制技术领域,具体涉及一种基于可控LED阵列的距离感应控制方法,该方法包括以下步骤:S100.确认可控LED阵列与后方物体的距离范围,在后方物体上生成一个光点图案,使该光点图案能被图像采集装置完整、清晰地采集;S200.根据图像采集装置采集的图像,确定光点图案在图像中的投影点的位置;S300.根据光点图案在世界坐标系中的位置,以及光点图案在图像中的投影点,计算出可控LED阵列与后方物体的距离。本发明的目的在于提供一种基于可控LED阵列的距离感应控制方法,解决了汽车倒车测距需要多个距离传感器导致成本过高的问题。
技术研发人员:林启程,邱国梁,曾剑峰,唐勇,谭琪琪
受保护的技术使用者:永林电子股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!