智能巡检机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及智能巡检机器人领域。
背景技术:
2.近年来,因基础建设的快速发展,公路铁路隧道、城市综合管廊的存量持续增加。有数据表明截至2018年底,中国公路隧道为17738 处,总长17236.1km,其中包括港珠澳大桥海底隧道等世界著名的海底隧道,这些隧道的沉降及变形问题是隧道及管廊维护养护的重点。
3.因管隧道地下水位的变化、土壤海底的自然沉降、附近施工会对原有管隧道结构产生影响,也会导致管隧道周围土体应力变化,从而引起管隧道结构产生位移,会对安全出行及管廊安全带来隐患。因此,对管隧道变形区的沉降及变形的监测和测量具有十分重要的意义。
4.目前管隧道沉降检测普遍采用人工利用水准仪测量的方法:在变形区域外的稳定区域两侧,各选取一个控制点作为日常工作基点,利用两个工作基点,与变形区域内各监测点构成附合水准路线,依次测得每个监测点的高程,通过比较两期对应监测点高程的差,即可得到监测点的垂直位移变化情况。
5.管隧道水平位移及三维变形测量一般采用人工利用全站仪进行的测量方法:在变形区域外的稳定区域选取稳定点作为控制点,在变形区域内等间隔设置若干水平位移监测点,在变形区域中间区域设置一系列的固定测量站点,用以测量各个监测点平面坐标。在测量过程中,仪器架设于观测点,利用至少3个以上控制点后方交会得出观测点坐标,然后以其中一个控制点定向,人工移动全站仪,依次测得各个监测点坐标,分别比较两期监测点坐标,即可得到监测点的水平位移变化情况。实际上,沉降检测中,会因仪器架站次数的增多,导致误差积累,从而影响最后的监测成果的质量;而变形检测在施测过程中会引入两部分误差,一是后方交会引起的误差,二是定向产生的误差。而经验表明,在精密工程测量领域,即使很小的误差也会导致错误的变形监测结果或者不可靠的变形监测结果。并且,沉降和变形测量分开施测无疑大大增加了测量外业工作量。
6.此外,人工检测具有耗时费力、工作量大、耗时长、效率低、占用线路周期长、存在安全隐患等弊端,监测数据易受人为因素影响,且无法达到快速获取变形数据的要求。
7.为了解决人工测量的种种弊端,有少部分企业和科研单位也在研究自动化监测的方法,包括静力水准、光纤传感器可以节省大量人工劳力。
8.如cn102661737a的专利中,记载了一种隧道结构沉降变形自动群测系统及其群测方法,在隧道测点位置分别布置多个激光组件,来观测隧道沉降变形。
9.如专利号为201822083293.0的专利中,记载了一种隧道变形实时监测装置,采用在隧道顶部设置的多个水准仪和激光测距仪的方法来观测沉降及变形。
10.同时目前也有采用在隧道内,连续部署多台全站仪的方法,进行自动化测量的方法,但是由于高精度全站仪价格昂贵,对于较长的隧道,成本过高而难以实施。上述方法,虽
然可以节省大量人工,但均采用大量布置测量仪器的方法,对隧道结构有一定影响,而且要对隧道进行大量施工,综合成本高。
11.这些不同的自动化监测手段都有其各自的优缺点,通常无法兼顾,监测范围有限,而且监测基准点往往随隧道的整体变形而产生变化,往往在实际应用中仍需采用人工监测的方法进行修正。
12.同时管隧道内也存在渗漏水、内部结构变形等病害,需要分别采用人工的方式进行测量。
技术实现要素:
13.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的智能巡检机器人。
14.本实用新型的实施例是这样实现的:
15.一种智能巡检机器人,包括:机器人本体及移动平台、定位导航装置、自动整平装置、测量仪器、图像采集装置、内置服务器、通讯装置组成;
16.所述的机器人本体及移动平台在底部设有驱动轮或履带、用于按预设的路线自动行驶,并自动在预设多个检测点停留作业;
17.所述的自动整平装置,安装在机器人本体及移动平台上方,用于为测量仪器提供严格水平的基准平台,带有横向调平电机、纵向调平电机及水平检测装置,并在自动调平后锁紧;所述的测量仪器安装在自动整平装置上。
18.可选地,测量仪器为数字全站仪或数字水准仪中的一种或两种组合,其中全站仪为带有自动目标识别与搜索功能的自动全站仪,用于测量管隧道的沉降及变形数据。
19.可选地,成像装置以及云台,成像装置通过云台设置于机器人本体及移动平台上,用于对检测目标进行图像采集。
20.可选地,巡检机器人还包括设置于机器人本体及移动平台上的定位导航装置,包括超宽带(uwb)定位装置、激光雷达、机器视觉景深摄像头等的一种或多种组合。定位导航装置与内置服务器信号连接,用于向内置服务器输入导航信息,为机器人进行定位导航。
21.可选地,图像采集装置包括云台、可见光相机和红外热成像相机,云台底部与机器人本体及移动平台连接,可见光相机和红外热成像仪分别安装于云台两侧,用于对检测目标进行光学图像采集和红外图像采集。
22.可选地,机器人本体及移动平台包括内置服务器,所述的内置服务器为多核人工智能服务器,用于控制机器人本体及移动平台的运动、操作机载检测设备、执行规定的检测动作序列、对测量仪器的检测数据进行计算及存储、对图像采集装置的图像进行存储及智能判断。
23.可选地,巡检机器人还包括设置于机器人本体及移动平台上的通讯装置,通讯装置与内置服务器信号连接。所述的通讯装置包括wifi、 4g装置以及5g装置中的任何一种或多种,实现信号传输功能。
24.可选地,巡检机器人还包括设置于机器人本体及移动平台上的急停按钮,急停按钮与内置服务器连接。
25.可选地,所述巡检机器人还包括充电触点,充电触点设置于机器人本体及移动平
台的侧面,用于与充电装置的充电触点快速电连接。
26.可选地,所述巡检机器人上安装有三维激光扫描装置,用于扫描获取管隧道的三维点云数据。
27.进一步的,本专利的另一方面,还公开了一种智能巡检机器人的巡检方法,包括上述任意一项的巡检机器人。包括在待检测的管隧道内还安装有棱镜,所述的棱镜用于布设在管隧道的监测区间内,用以将监测区间内的监测断面上布设的测点反射至全站仪,每个管节的顶部及两端部署不少于3个棱镜,相邻管节棱镜位置交错排列,避免互相遮挡。
28.包括如下步骤:
29.s1:机器人自检,判断是否自检成功,若为否,则继续自检并报警,若为是,则打开工程配置;
30.s2:打开工程配置后,判断是否有已知导航地图,若为否,则结束项目,若为是,则启动自动测量作业;
31.s3:启动自动测量作业后,机器人自动行驶到预设的第一检测点,到达第一检测点后,驱动自整平基座进行自我调平并锁紧;
32.s4:调平后执行初始校准动作序列,对校准控制点进行检测,并解算校准数据;
33.s5:判断校准数据是否正确,与已知的本检测位置的历史检测数据进行对比,若本次检测数据在预设定误差范围内,则继续执行检测作业,若超过误差,则调整相关参数,重新校准,直至校准数据正确;
34.s6:按预定路线自动行驶到下一检测点,调平自动整平装置,调用检测动作序列进行本检测点的检测作业,取得相应的检测数据;
35.s7:比对历史检测数据,判断本次检测数据是否在预设范围内,若为否,则记录异常数据并报警,并重新检测,若为是,则完成本检测点的检测作业;
36.s8:判断是否完成所有的检测作业,若为否,则按预定路径行驶到下一检测点,继续执行检测作业;若为是,则表示完成了所有检测作业,则对检测作业进行处理及整体解算,给出检测数据。
37.本实用新型具有如下有益效果:
38.1、利用智能巡检机器人携带测量仪器进行无人化检测的方式,具有精度高、自动化性能好等特点,完全可以弥补传统方法的漏洞,同时可以更好地运用于管隧道人工无法长时间作业的特殊环境,可以实现高效检测。无人化的检测方案能保证频繁的定期检测,及时发现严重病害,精确定位病害,保证隧道维护工作的顺利开展,也是后期自动化病害修补的基础,为病害图像数据提供位置信息也有助于病害成因的研究。使得在维养过程中能够及时发现问题消除隐患,提高维养的自动化智能化水平。
39.2、利用智能巡检机器人自动沿着预定检测线路进行移动检测,通过多角度定位检测能够有效提升检测效率、提高检测精度,同时检测范围不易发生遗漏,保证了检测的全面性。
40.3、利用智能巡检机器人携带的调平装置和全站仪,将管道沉降、垂直位移、水平位移巡、变形、三维姿态变化的测量整合为一,既能够继承全站仪的精度,又实现了无人化自动测量,减少了作业时间,大大提高了劳动效率,避免了常规的人工检测操作的费时费力,可以提升检测频率,能够进行频繁的定期检测。
vehicle)等。当然,本领域技术人员还可以根据实际需求设置该移动平台100,其可以是地面移动车辆,也可以是以吊轨方式运动的多种移动平台,或者是采用麦克纳姆轮、全向轮,或四足方式运动的移动平台,在本实用新型实施例中对于移动平台100的具体设置不做限制,只要能够承载设置在其上的多种装置进行移动即可。
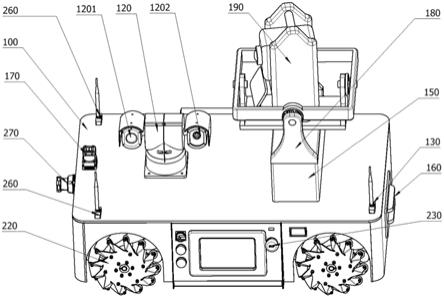
55.如图1所示,自动整平装置180安装在机器人本体及移动平台 100上方,并与内置服务器150连接,用于为测量仪器190提供严格水平的测量基准。
56.如图1所示,所述测量仪器190,安装在自动整平装置180的上面,为数字全站仪或水准仪中的一种或两种,其中实施例中为带有自动目标识别与搜索功能的自动全站仪,如徕卡ts60等,用于测量管隧道的沉降及管道变形数据;
57.如图1所示,所述的定位导航装置,包括超宽带(uwb)定位装置260、导航雷达170、机器视觉景深摄像头等的一种或多种组合,导航雷达170、超宽带(uwb)定位装置260与内置服务器150连接,用于定位导航,其中导航雷达170可以是激光雷达、太赫兹雷达等任意具有环境扫描感知能力的导航雷达,此处不做具体限制。
58.如图1所示,所述的图像采集装置包括云台120、可见光相机1201 或红外热像相机1202,用于对巡检目标进行红外或者图像采集。
59.如图1所示,所述的内置服务器150,安装在机器人本体及移动平台100的上部,为多核人工智能服务器,用于控制机器人本体及移动平台100的运动、操作机载检测设备、执行规定的检测动作序列、对全站仪的检测数据存储及计算,还用于将图像采集装置1201及 1202采集到的图像数据进行存储和分析处理。
60.如图1所示,所述的通讯装置130,安装在机器人本体及移动平台100的上部,通讯装置130与内置服务器150连接,通讯装置130 可以是wifi通讯装置、蓝牙通讯装置、4g装置以及5g装置等,此处不做具体限制,只要能够实现信号传输的功能即可,用于将数据传输至远端的中心数据库。
61.如图1所示,所述的三维激光扫描装置270,安装在机器人本体及移动平台100的前方,用于扫描获取管隧道的三维点云数据。
62.如图1所示,巡检机器人还包括设置于机器人本体及移动平台上的急停按钮230,急停按钮与内置服务器150连接。
63.如图1所示,所述巡检机器人还包括所述的充电接触器160,充电接触器160设置于机器人本体及移动平台的侧面,用于与充电装置的充电接触点的电连接。
64.检测工作流程及工作原理,如图2所示:在使用智能巡检机器人时,通过通讯装置130的设置可以使机器人本体及移动平台100与远程控制进行对接,能够传递实时数据,当收到自动巡检命令后,内置服务器150启动驱动轮220移动;内置服务器通过导航雷达170与超宽带(uwb)定位装置260可以获得环境导航数据,计算后引导机器人按照预定的路线进行巡检,并且引导机器人在预设的第n检测点进行停留执行检测作业。本实施例中,内置服务器中采用业内普遍使用的ros机器人定位导航系统,该系统为开源的系统,为公知技术,可以实现管隧道内的定位导航。
65.所述的检测分为测量作业和检测作业两种情况,其中测量作业需要使用自助整平设备180。
66.在到达预定的检测点,需要机器人执行测量作业时:内置服务器 150发出整平指
令,操作自动整平装置180,将自动整平装置180的底座调整水平,测量仪器190与自动整平装置180的底座相连接,整平后自动整平装置180自动锁紧,同时为测量仪器190,提供了严格水平的测量基础保障。内置服务器150发出测量动作序列指令,操作测量仪器190,进行一系列的测量作业。本实施例中,测量仪器为带有自动目标识别与搜索功能的自动全站仪,可以是数字水准仪,此处不做限制,本实施例以全站仪为例,内置服务器150操作全站仪对管隧道内部部署的棱镜进行一系列测量工作。
67.得到检测数据后,将测量得到的数据进行存储和平差计算,从而得到最终的测量数据。其中全站仪的测量、数据处理、平差算法等,均为业内公知技术。
68.在执行检测作业时:内置服务器150发出检测指令,操作检测设备120,进行相关的测量作业,本实施例中,检测设备120为云台,其两侧分别连接有可见光相机1201、红外热像相机1202。
69.本实施例中隧道内的渗漏水病害检测方法:内置服务器150发出检测指令,操作检测设备云台120带动红外热像相机1202对隧道进行扫描,根据红外热像相机1202获得的温度图像,通过内置服务器 150的计算,可以发现管隧道的渗漏水病害。渗漏水红外检测的原理是,当管隧道表面有渗漏水情况出现时,渗漏水部位由于水份蒸发而导致温度较周围温度降低,在红外热像相机的图像上呈现出与周围正常区域不同的颜色,从而发现渗漏水病害。经实验,红外热像相机需要选择灵敏度高于为0.3c
°
的红外热像相机,可以准确的识别渗漏水。
70.本实施例中隧道内裂缝、灯具损坏等其他病害检测的方法:内置服务器150发出检测指令,操作检测设备云台120带动可见光相机 1201对隧道进行扫描,获取图像后,存储到内置服务器150中,同时内置服务器150预置相应的算法,对图像进行识别计算,可实现隧道表面的裂缝识别,灯具损坏识别等检测项目。其中图像识别的方法是,利用机器视觉技术结合人工智能的深度学习技术算法,由于图像识别技术为目前业内公知技术,有opencv、yolo等很多开源的算法,因此不再赘述。
71.如图3及图4所示,自动整平装置180,带有横向调平电机1803、纵向调平电机1806及水平检测装置1807,通过横向整平电机1803 与纵向整平电机1806可以分别调节横向支撑框1801与纵向支撑框 1804的水平状态,水平检测装置1807为陀螺仪,可以精确的检测整平后的数据,在自动整平后,内置服务器150操作横向整平电机1803 与纵向整平电机1806自动锁定,使得使测量仪器190在定位检测时能够保证严格水平的测量基准位置,并且电机锁定后,可以确保测量仪器190在测量过程中的底座不发生移动,以提高测量的精度。
72.该巡检系统还可以包括与巡检机器人对应的控制中心等终端,用于控制机器人的运动、导航、接收和处理成像装置120传输的图像信息、测量装置190传输的数据信息。当成像装置120采用具有无线传输功能的设备时,成像装置120与控制中心之间的数据传输可以通过无线传输进行,并且可以是实时传输也可以是周期性传输,或者巡检机器人结束巡检后一次性传输。
73.同时,当测量仪器190和成像装置120采用的设备不具有主动传输功能时,可以通过将测量仪器190和成像装置120的数据存储设备的数据导入到控制中心的方式,实现测量仪器190和成像装置120与控制中心之间的数据传输。当然,在实际应用中,成像装置120与控制中心之间的数据传输方式还有其他具体形式,此处不做具体限制。
74.本实施例中管隧道沉降及变形的检测方法:如图7所示,在进行管隧道沉降及变形检测时,60、70、80分别为隧道的不同管节,在隧道一端的稳定区安装基准点棱镜61、62、63,在隧道另外一端的稳定区按照基准点棱镜64、65、66。在管节60的一端,安装棱镜601、602、603,在管节60的另外一端,分别安装棱镜604、605、606,在管节70的一端分别安装棱镜701、702、703,以此类推,所述的棱镜布设在管隧道的监测区间内,用以将监测区间内的监测断面上布设的测点反射至全站仪,每个管节的顶部及两端部署分别不少于3个棱镜,相邻管节棱镜位置交错排列,避免互相遮挡。机器人81按照预设的路线,行驶在隧道内,在预设的检测点停止后,操作全站仪对各个棱镜,进行识别,并且分别测量,将测量结果存储在机器人的内置服务器内。
75.由于管道隧道内gps及北斗等卫星导航信号被遮挡,本实施例中,采用沿途部署超宽带(uwb)装置,构建导航系统的方式,为机器人提供定位导航,该导航方式采用业内普遍使用的dw1000芯片为核心方案,为公知技术。
76.本实施例智能巡检作业的流程图,如图5所示,进一步的,本专利还公开了一种智能巡检机器人的巡检方法,包括如下步骤:
77.s1:机器人自检,判断是否自检成功,若为否,则继续自检并报警,若为是,则打开工程配置;
78.s2:打开工程配置后,判断是否有已知导航地图,若为否,则结束项目,若为是,则启动自动测量作业;
79.s3:启动自动测量作业后,机器人自动行驶到预设的第一检测点,到达第一检测点后,驱动自整平基座进行自我调平并锁紧;
80.s4:调平后执行初始校准动作序列,对校准控制点进行检测,并解算校准数据;
81.s5:判断校准数据是否正确,与已知的本检测位置的历史检测数据进行对比,若本次检测数据在预设定误差范围内,则继续执行检测作业,若超过误差,则调整相关参数,重新校准,直至校准数据正确;
82.s6:按预定路线自动行驶到下一检测点,调平自动整平装置,调用检测动作序列进行本检测点的检测作业,取得相应的检测数据;
83.s7:比对历史检测数据,判断本次检测数据是否在预设范围内,若为否,则记录异常数据并报警,并重新检测,若为是,则完成本检测点的检测作业;
84.s8:判断是否完成所有的检测作业,若为否,则按预定路径行驶到下一检测点,继续执行检测作业;若为是,则表示完成了所有检测作业,则对检测作业进行处理及整体解算,给出检测数据。
85.本实施例中,每个检测点的沉降及变形检测流程图如图6所示。
86.s1:机器人达到预设的检测点后,微调机器人本体及移动平台在检测点位置,判断机器人所停止的检测点位置是否正常,若不正常,微调机器人本体及移动平台在检测点位置,重复该动作,直至机器人本体及移动平台在检测点的位置正常;
87.s2:内置服务器发出指令,对自动整平装置进行调平。若未调平则重复调平动作,若已调平,则锁紧并进行下一步;
88.s3:根据本检测点位的数据,执行检测动作序列,调用粗瞄坐标及指向数据;
89.s4:将粗瞄数据传输给全站仪,引导全站仪瞄准各个棱镜,按预设的顺序进行测
量;
90.s5:取得各个棱镜的测量结果数据,进行数据解算,其中数据解算方法参照全站仪的数据解算方法;
91.s6:与历史本检测的检测数据进行比对,判断数据是否在误差范围内,如果超过误差范围,则记录后报警,并启动智能抗干扰算法,调整粗瞄坐标,重复s3-s4步骤重新测量,如果在误差范围内,则认为检测正常,进行下一步;
92.s7:更新记录本检测点的相关数据,判断是否完成本次检测动作序列,如果未完成,则重复s1-s6步骤,直至所有检测动作完成,结束本检测点的检测动作。
93.本实施例中,新建工程的学习及设置方法流程如图8所示。
94.s1:操作机器人对需要行驶的路线进行学习及存储记录,包括路线上的各个检测点的位置,进行学习及存储记录;
95.s2:按顺序行驶到待检测点,对对应检测点的检测动作原语序列进行学习及存储记录;
96.s3:判断是否完成本检测点的检测动作原语序列,没有完成继续学习,是否完成所有检测的学习,没有完成继续学习;
97.s4:所有检测点及检测动作原语序列学习完成后,记录及存储巡检线路,完成新建工程工作。
98.全部测量工作完成后,需要对数据进行计算处理,利用全站仪测量并取得测量数据后,将各检测点(测站)以及转折参考点的空间位置信息数据的矩阵进行解算。得到沉降及变形数据的方法,以及在测量后通过隧道两端基准点对数据进行整体平差的算法,是行业内的常见算法,可直接利用开源的算法也可以对算法进行合理调整,此处不再赘述。
99.在测量完成后,利用不同定点测量位置的观测数据,进行整体平差算法,能够客观反映管隧道内各个监测点在基准坐标系下的沉降及管隧道三维变形数据。
100.通过对隧道进行三维建模,将测量及计算出的数据赋予三维模型,更新各个管节的位置姿态和各个三维模型的相对位置,与历史管节位姿进行比较,可以解算出管节不均匀沉降(竖向变形)、姿态变化、横向错位、扭转变形、纵向拉压错位、管节接头间隙变化等多种数据,用于判断隧道管节的沉降变形状态。
101.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1