一种协方差矩阵重构自适应波束形成方法及系统
1.本发明涉及阵列信号处理领域,涉及一种协方差矩阵重构自适应波束形成方法及系统。
背景技术:
2.在传感器阵列的自适应波束形成技术在过去的几十年里,得到了迅速的发展,相关成果已经广泛应用于各个领域。作为最著名的自适应波束形成器,capon波束形成器能够在训练数据不含期望信号时,可以达到其理论性能的最优。然而,在实际的应用环境下,阵列的接收数据中往往存在期望信号,尤其是在信噪比较高时,会导致经典的自适应波束形成方法对期望信号导向矢量的失配更加敏感。
3.为了提高自适应波束形成器的稳健性,近年来国内外学者提出了许多稳健波束形成器,根据使用的协方差矩阵归纳起来有以下两类:
4.1)文献1“robust adaptive beamforming,”ieee transactions on acoustics speech and signal processing,vol.35,no.10,pp.1365
‑
1376,oct,1987.”和文献2“robust capon beamforming,”ieee signal processing letters,vol.10,no.6,pp.172
‑
175,jun,2003.”中公开的对角加载方法和不确定集约束方法能够较好的改善稳健性,但对角加载量和不确定集大小难以根据实际情况确定,难以实际使用。
5.2)文献3“robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation,ieee trans.signal process.,vol.60,no.7,pp.3881
‑
3885,jul.2012.”中公开的重构干扰加噪声协方差矩阵(interference
‑
plus
‑
noise covariance matrix,incm)算法能够有效地去除协方差矩阵中的期望信号分量,从而降低波束形成器对期望信号导向矢量误差的敏感性,但同时重构的incm中可能存在干扰的导向矢量误差,从而降低了干扰抑制能力。
6.综上所述,第1)类方法直接利用接收数据协方差矩阵(sample covariance matrix,scm),为了保证稳健性,对干扰抑制能力有极大地牺牲;第2)类方法能够有效保证稳健性,但当存在模型失配时,其干扰抑制能力会下降。这两类算法都基于阵元接收数据,其输出信干噪比与输入信噪比的差值,不会超过阵增益。
技术实现要素:
7.为了避免现有自适应波束形成的不足之处,本发明提出一种基于虚拟线列阵的协方差矩阵重构自适应波束形成方法,在所有入射信号方向未知的前提下,利用阵列接收数据和线性预测技术,拟合得到虚拟阵元的接收数据,从而提高自适应波束形成的自由度,最终提高自适应波束形成器对干扰和噪声的抑制能力。
8.为达到上述目的,本发明采用的技术方案为:一种协方差矩阵重构自适应波束形成方法,具体过程如下:
9.获取均匀线列阵接收时域数据,分别计算前向拟合系数和后向拟合系数,并采用
递推的方式依次对虚拟阵元所接收到的数据进行拟合,从而预测出各个虚拟阵元的快拍数据;
10.利用包含实际阵元和虚拟阵元的快拍数据计算更高维度的干扰加噪声协方差矩阵,并采用特征分解和提取较大特征值的方式剔除重构误差,最终引入理想的噪声协方差矩阵,得到虚拟阵列对应的改善干扰加噪声协方差矩阵;
11.采用与计算改善干扰加噪声协方差矩阵的同样的方式,重构虚拟阵列对应的期望信号协方差矩阵,并提取出期望信号协方差矩阵最大特征值对应的特征向量,作为期望信号的导向矢量,根据所述导向矢量计算虚拟阵列对应的波束形成器加权向量,进而根据所述加权向量和虚拟线列阵的接收数据矩阵得到波束输出。
12.获取均匀线列阵接收时域数据,分别计算前向和后向的线性预测系数,具体过程如下:
13.均匀线列阵接收来自空间的信号和噪声的时域快拍数据;
14.计算均匀线列阵中除第1个振元以外其余阵元数据所对应的前向样本协方差矩阵,再计算前向拟合的拟合向量;
15.根据前向拟合的拟合向量计算得到前向拟合系数;
16.计算均匀线列阵中除最后一个振元以外其余振元数据所对应的前向样本协方差矩阵,再计算前向拟合的拟合向量;
17.根据所述拟合向量计算得到后向拟合系数。
18.按照递推的方式依次对虚拟阵元位置处所接收到的数据进行拟合,从而预测出各个虚拟阵元的快拍数据过程如下:
19.取虚拟振列中除最后一个振元以外其他振元数据,计算0号振元的前向拟合数据,依次计算到第n个前向拟合数据;
20.取虚拟振列中除第一个振元以外其他振元数据,计算后向编号最大振元的数据,依次分别计算到第n个后向拟合数据。
21.利用包含实际阵元和虚拟阵元的快拍数据计算更高维度的干扰加噪声协方差矩阵,并采用特征分解和提取较大特征值的方式剔除重构误差,最终添加入理想的噪声协方差矩阵,得到虚拟阵列对应的改善干扰加噪声协方差矩阵和重构虚拟阵列对应的期望信号协方差矩阵,具体过程如下:
22.将前向拟合数据、原始阵元接收数据以及后向拟合数据组合在一起,得到虚拟线列阵的接收数据矩阵;
23.根据所述接收数据矩阵计算虚拟线列阵的样协方差矩阵;
24.根据虚拟线列阵的阵元编号,得到对应的角度的导向矢量,
25.基于所述导向矢量计算各个角度对应的对角加载capon空间谱;
26.根据所述capon空间谱,划分期望信号扇区,然后划定除期望扇区以外的干扰加噪声扇区;
27.在所述干扰加噪声扇区内初步计算干扰加噪声协方差矩阵;
28.对所述干扰加噪声协方差矩阵进行特征分解;
29.根据特征分解结果得到修正的干扰加噪声协方差矩阵;
30.在期望信号扇区内重构期望信号协方差矩阵。
31.获取均匀线列阵接收时域数据,分别计算前向和后向的线性预测系数,并按照递推的方式依次对虚拟阵元所接收到的数据进行拟合,预测各个虚拟阵元的快拍数据,具体包括以下步骤:
32.m个换能器组成的均匀线列阵接收来自空间的信号和噪声的时域快拍数据x(k)=[x1(k),x2(k),
…
,x
m
(k)]
t
,其中信号与噪声不相关,x
m
(k)表示第m个阵元接收到的时域数据,计算第2至m个阵元数据x
f
(k)=[x2(k),
…
,x
m
(k)]
t
所对应的前向样本协方差矩阵
[0033][0034]
计算前向拟合的拟合向量d
f
:
[0035][0036]
最后得到前向拟合系数α
f
:
[0037][0038]
计算第1至m
‑
1个阵元数据x
b
(k)=[x1(k),
…
,x
m
‑1(k)]
t
所对应的前向样本协方差矩阵,
[0039][0040]
再计算前向拟合的拟合向量d
b
:
[0041][0042]
最后得到后向拟合系数β:
[0043][0044]
取第1至m
‑
1个阵元数据x
temp
(k)=[x1(k),
…
,x
m
‑1(k)]
t
,计算0号阵元的前向拟合数据,
[0045][0046]
按照此规律,依次分别计算到第n个前向拟合数据:
[0047][0048]
取第2至m个阵元数据x
temp
(k)=[x2(k),
…
,x
m
(k)]
t
,计算后向m+1号阵元的数据,
[0049][0050]
按照此规律,依次分别计算到第n个后向拟合数据:
[0051][0052]
将前向拟合数据、原始阵元接收数据以及后向拟合数据组合在一起,得到虚拟线列阵的接收数据矩阵,
[0053]
x
lp
(k)=[x1‑
n
(k),
…
,x1(k),
…
,x
m
(k),
…
,x
m+n
(k)]
t
,
[0054]
接着,计算采样协方差矩阵,
[0055][0056]
利用包含实际阵元和虚拟阵元的快拍数据计算更高维度的干扰加噪声协方差矩阵,并采用特征分解和提取大特征值的方式剔除重构误差,最终结合理想的噪声协方差矩阵,得到虚拟阵列对应的改善干扰加噪声协方差矩阵;具体如下:
[0057]
根据虚拟线列阵的阵元编号,得到对应的θ角度的导向矢量a
lp
(θ),计算各个角度对应的对角加载capon空间谱p(θ),
[0058][0059]
其中i是单位对角矩阵,
[0060]
根据capon空间谱,划分期望信号扇区其中b为设置的区域宽度,然后划定除期望扇区以外的干扰加噪声扇区为θ的补集,在干扰加噪声扇区内初步计算干扰加噪声协方差矩阵
[0061][0062]
其中θ
l
是内的第l个离散角度,接着进行特征分解
[0063][0064]
其中:λ
m
(m=1,
…
,m)为按照从大到小顺序排列的特征值,v
m
是对应的特征向量;d
int
表示包含所有较大特征值的对角阵,v
int
包含了较大特征值对应的特征向量,r
e
表示由较小特征值和特征向量组成的误差协方差矩阵,所述较大特征值是根据估计干扰信号个数为q,加上1个信号数为q+1,q+1是使得上式成立的最小正整数;由大至小排
列的q个干扰信号个数加上1个信号数q+1组成较大特征值;此时,干扰加噪声协方差矩阵修正为:
[0065][0066]
其中是估计的噪声功率,为最小特征值,
[0067]
在期望信号扇区内,重构期望信号协方差矩阵
[0068][0069]
其中θ
l
是θ内的第l个离散角度,估计期望信号的导向矢量为,
[0070][0071]
其中,为矩阵的最大特征值对应的特征向量;
[0072]
计算虚拟阵列对应的波束形成器加权向量w
lp
:
[0073][0074]
根据该加权向量和虚拟线列阵的接收数据矩阵计算波束输出y(k):
[0075][0076]
一种协方差矩阵重构自适应波束形成系统,包括快拍数据获取模块、协方差矩阵计算模块、
[0077]
快拍数据获取模块用于获取均匀线列阵接收时域数据,分别计算前向和后向的线性预测系数,并采用递推的方式依次对虚拟阵元所接收到的数据进行拟合,从而预测出各个虚拟阵元的快拍数据;
[0078]
协方差矩阵计算模块用于根据包含实际阵元和虚拟阵元的快拍数据计算更高维度的干扰加噪声协方差矩阵,并采用特征分解和提取大特征值的方式剔除重构误差,引入理想的噪声协方差矩阵,得到虚拟阵列对应的改善干扰加噪声协方差矩阵;
[0079]
输出波束计算模块用于采用和计算改善干扰加噪声协方差矩阵同样的方式重构虚拟阵列对应的期望信号协方差矩阵,并提取出最大特征值对应的特征向量作为期望信号的导向矢量,根据所述导向矢量计算虚拟阵列对应的波束形成器加权向量,进而根据所述加权向量和虚拟线列阵的接收数据矩阵得到波束输出。
[0080]
一种计算机设备,包括处理器以及存储器,存储器用于存储计算机可执行程序,处理器从存储器中读取部分或全部所述计算机可执行程序并执行,处理器执行部分或全部计算可执行程序时能实现本发明所述协方差矩阵重构自适应波束形成方法。
[0081]
一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时,能实现本发明所述的协方差矩阵重构自适应波束形成方法。
[0082]
与现有技术相比,本发明至少具有以下有益效果:本发明将线性预测与协方差矩阵重构技术相结合,首先以线性预测拟合出前后向的虚拟阵元的接收数据,从而提升阵列的通道数。线性预测与协方差矩阵重构技术结合后,不仅能够提高自适应波束形成器的阵
增益,还能提高自适应波束形成器的复杂度,一方面使得波束形成器在阵列误差较小时能够在干扰方向形成更深的凹陷,另一方面也能够在阵列误差较大时通过较低的旁瓣抑制干扰,最终提高自适应波束形成器对干扰和噪声的抑制能力。
附图说明
[0083]
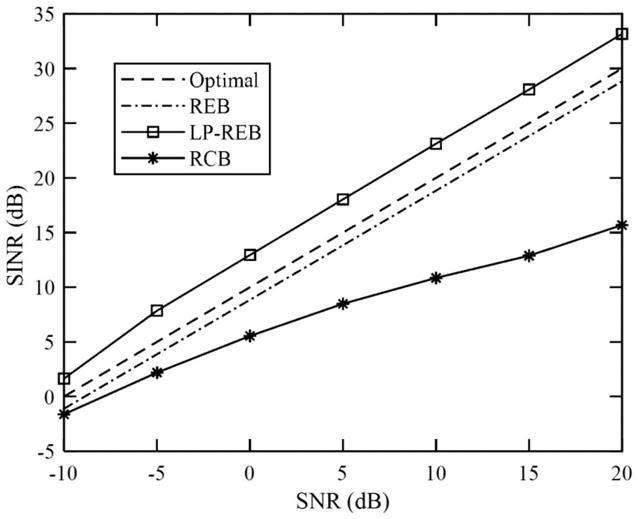
图1为所提虚拟阵列波束形成方法的输出sinr随输入snr的变化情况。
[0084]
图2为所提虚拟阵列波束形成方法的输出sinr随输入快拍数的变化情况。
[0085]
图3为所提虚拟阵列波束形成方法的输出sinr随前后向拟合数n的变化情况。
具体实施方式
[0086]
下面结合附图对本发明作进一步的描述。
[0087]
本发明利用已有的均匀线列阵接收数据,通过线性预测的方式拟合出虚拟阵元,从而构成虚拟阵列,从而提升阵列的通道数,提高自适应波束形成的性能。
[0088]
实施例
[0089]
仿真1:水下声速为1500m/s,考虑一个10元线列阵,假设的阵元间距为0.5m,期望信号假设位于15
°
,信噪比从
‑
10db到20db变化,干扰假设位于
‑
25
°
和35
°
,干噪比为20db,噪声为高斯均匀白噪声。期望信号和干扰信号均为中心频率为1500hz的窄带不相干信号。前后向均拟合n=5个虚拟阵元,快拍数为k=30个。
[0090]
为了阐述本方法的统计性能,共仿真200次,最终得到输出新干噪比随输入信噪比变化的统计结果。对于每次仿真,重复本方法的以下操作步骤以得到加权向量:
[0091]
步骤1:10个水听器组成的均匀线列阵接收来自空间的信号和噪声的时域快拍数据x(k)=[x1(k),x2(k),
…
,x
10
(k)]
t
,其中信号与噪声不相关,x
m
(k)表示第m个阵元接收到的时域数据。虚拟振元和实际振元共同组成虚拟线列阵,计算第2至10个阵元数据x
f
(k)=[x2(k),
…
,x
10
(k)]
t
所对应的前向样本协方差矩阵,
[0092][0093]
再计算前向拟合的拟合向量,
[0094][0095]
最后得到前向拟合系数
[0096]
接着,计算第1至9个阵元数据x
b
(k)=[x1(k),
…
,x9(k)]
t
所对应的前向样本协方差矩阵,
[0097][0098]
再计算前向拟合的拟合向量,
[0099]
[0100]
最后得到后向拟合系数
[0101]
步骤2:取第1至9个阵元数据x
temp
(k)=[x1(k),
…
,x9(k)]
t
,计算0号阵元的前向拟合数据,
[0102][0103]
按照此规律,依次分别计算到第5个前向拟合数据:
[0104][0105]
取第2至10个阵元数据x
temp
(k)=[x2(k),
…
,x
10
(k)]
t
,计算后向11号阵元的数据,
[0106][0107]
按照此规律,依次分别计算到第5个后向拟合数据:
[0108][0109]
步骤3:已经前向和后向均拟合了5个数据,将前向拟合数据、原始阵元接收数据以及后向拟合数据组合在一起,得到虚拟线列阵的接收数据矩阵,
[0110]
x
lp
(k)=[x
‑4(k),
…
,x1(k),
…
,x
10
(k),
…
,x
15
(k)]
t
,
[0111]
接着,计算采样协方差矩阵,
[0112][0113]
设定离散角度间隔为1
°
,那么[
‑
90
°
,90
°
]内共181个离散角度。根据虚拟线列阵的阵元编号,得到对应的θ角度的导向矢量a
lp
(θ),,其包含20个元素,计算各个角度对应的对角加载capon空间谱,
[0114][0115]
其中i是单位对角矩阵。
[0116]
步骤4:根据capon空间谱估计期望信号角度为设置的区域宽度为b=10,那么划分期望信号扇区θ=[10
°
,20
°
],然后划定除期望扇区以外的干扰加噪声扇区共有l=181
‑
11=170个离散角度。在干扰加噪声扇区内初步计算干扰加噪声协方差矩阵
[0117][0118]
其中θ
l
是内的第l个离散角度。接着进行特征分解,
[0119][0120]
其中:λ
m
(m=1,
…
,10)为按照从大到小顺序排列的特征值,v
m
是对应的特征向量;d
int
表示包含所有较大特征值的对角阵,v
int
包含了较大特征值对应的特征向量,r
e
表示由较小特征值和特征向量组成的误差协方差矩阵,所述较大特征值是根据估计干扰信号个数为q,加上1个信号数为q+1,q+1是使得上式成立的最小正整数;由大至小排列的q个干扰信号个数加上1个信号数q+1组成较大特征值;此时,干扰加噪声协方差矩阵可以修正为,
[0121][0122]
其中是估计的噪声功率,通常可以认为是最小特征值;
[0123]
步骤5:在期望信号扇区内共有11个离散角度,按照步骤4所述方式重构期望信号协方差矩阵,从而得到,
[0124][0125]
其中θ
l
是θ内的第l个离散角度,估计期望信号的导向矢量为,
[0126][0127]
所述为矩阵的最大特征值对应的特征向量;
[0128]
步骤6:计算虚拟阵列对应的波束形成器加权向量,
[0129][0130]
根据该加权向量和虚拟线列阵的接收数据矩阵计算波束输出,
[0131][0132]
图1给出了当快拍数为30时,所提出的lp
‑
reb与reb和rcb波束形成方法的对比,可以看出,rcb在高信噪比下性能较差,而reb由于重构误差的存在,失踪低于最优上限(optimal)。而lp
‑
reb由于使用了虚拟阵列,增加了总的阵元数(10个真实阵元,10个虚拟阵元),能够有效地提高输出信干噪比,甚至优于10元阵列时的最优上限。
[0133]
仿真2:输入信噪比在保持在10db,让快拍数k从10到100变化,间隔为10.其余的仿真条件与仿真1相同,进行200次蒙特卡洛实验,并得到输出信干噪比的平均值随快拍数的变化图。步骤与仿真1对应步骤相同。
[0134]
图2给出了各个波束形成器的输出信干噪比随快拍数变化的情况,可以看出,rcb算法由于样本协方差矩阵在低样本数时存在估计误差,所以性能逐渐增强,但依然远远低
于20db,reb和lp
‑
reb由于采用了重构的协方差矩阵,所以对快拍数不敏感。其中,lp
‑
reb由于采用了更多的虚拟阵元数据,其输出信干燥比远远高于reb。
[0135]
仿真3:输入信噪比固定为10db,快拍数固定为30,让前后向拟合数量n从0到9以1为间隔进行变化,其余的仿真条件与仿真1相同,进行200次蒙特卡洛实验,并得到输出信干噪比的平均值随前后向拟合数量n的变化图。
[0136]
图3给出了lp
‑
reb的sinr随前后向拟合数量的变化,可以看出,随着前后向拟合数的增大,虚拟阵元数也增大,从而有效地提高了虚拟阵列的增益,最终提高了sinr。
[0137]
本发明提供一种协方差矩阵重构自适应波束形成系统,包括快拍数据获取模块、协方差矩阵计算模块、
[0138]
快拍数据获取模块用于获取均匀线列阵接收时域数据,分别计算前向和后向的线性预测系数,并采用递推的方式依次对虚拟阵元所接收到的数据进行拟合,从而预测出各个虚拟阵元的快拍数据;
[0139]
协方差矩阵计算模块用于根据包含实际阵元和虚拟阵元的快拍数据计算更高维度的干扰加噪声协方差矩阵,并采用特征分解和提取大特征值的方式剔除重构误差,引入理想的噪声协方差矩阵,得到虚拟阵列对应的改善干扰加噪声协方差矩阵;
[0140]
输出波束计算模块用于采用和计算改善干扰加噪声协方差矩阵同样的方式重构虚拟阵列对应的期望信号协方差矩阵,并提取出最大特征值对应的特征向量作为期望信号的导向矢量,根据所述导向矢量计算虚拟阵列对应的波束形成器加权向量,进而根据所述加权向量和虚拟线列阵的接收数据矩阵得到波束输出。
[0141]
本发明还可以提供一种计算机设备,包括处理器以及存储器,存储器用于存储计算机可执行程序,处理器从存储器中读取部分或全部所述计算机可执行程序并执行,处理器执行部分或全部计算可执行程序时能实现本发明所述协方差矩阵重构自适应波束形成方法。
[0142]
另一方面,本发明提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时,能实现本发明所述的协方差矩阵重构自适应波束形成方法。
[0143]
所述计算机设备可以采用车载计算机、笔记本电脑、平板电脑、桌面型计算机、手机或工作站。
[0144]
处理器可以是中央处理器(cpu)、数字信号处理器(dsp)、专用集成电路(asic)或现成可编程门阵列(fpga)。
[0145]
对于本发明所述存储器,可以是车载计算机、笔记本电脑、平板电脑、桌面型计算机、手机或工作站的内部存储单元,如内存、硬盘;也可以采用外部存储单元,如移动硬盘、闪存卡。
[0146]
计算机可读存储介质可以包括计算机存储介质和通信介质。计算机存储介质包括以用于存储诸如计算机可读指令、数据结构、程序模块或其他数据等信息的任何方法或技术实现的易失性和非易失性、可移动和不可移动介质。计算机可读存储介质可以包括:只读存储器(rom,read only memory)、随机存取记忆体(ram,random access memory)、固态硬盘(ssd,solid state drives)或光盘等。其中,随机存取记忆体可以包括电阻式随机存取记忆体(reram,resistance random access memory)和动态随机存取存储器(dram,
dynamic random access memory)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1