一种自组织车联网的数据感知路由方法、系统、存储介质及设备
1.本发明涉及一种车辆自组织网络的路由方法,属于车联网通信技术领域。
背景技术:
2.随着无线移动通信技术和短距离无线通信技术的不断发展、无线通信设备及终端的普及,车联网(wireless vehicular networks)应运而生。通过车辆上安装的中短距离无线通信设备,如专用短距离无线通信(dsrc)、无线局域网ieee 802.11(wifi)等,在一定距离内车辆之间能够形成无线通信;在路侧安装无线基站后,车辆与路侧设施之间也能实现无线信息交互,车辆节点与路侧设施系统一起构成了一种新型的无线移动自组织网络,即车联网。车辆节点能承载多种感知设备,如gps位置及速度感知设备、路面震动感知设备、环境感知设备等,车联网也是一种感知能力强、覆盖范围极广的群智感知网络。
3.车联网的发展将孕育并支撑社会经济生活中的一批重要应用,包括行车警示与安全、移动监测、智能交通、网络接入、办公娱乐等。
4.行车安全应用:通过车辆间的实时无线信息交互,能够有效提升行车安全,例如在高速公路前方发生交通事故后,前方车辆可以通过无线通信方式将事故地点时间等相关信息通知附近的相关车辆,使它们注意降低行车速度,避让事故车辆。前后车辆之间通过信息交换,能够感知对方的实时位置,注意保持安全的行车间距。
5.移动城市监测:通过车辆上安装感知设备,如空气质量、温湿度、三维加速计等,能够实时感知城市的环境信息、道路维护状况等,能提高道路的养护水平,改善城市生活的环境质量。
6.智能交通应用:全球定位系统(gps)接收终端已经逐渐普及,通过在车上安装gps位置及速度感知设备,车辆能够实时获取当前的物理位置及行车速度,通过大量统计车辆的行车速度,城市运行管理部门能够及时掌握当前各道路的通行状况,在发生交通拥塞后,迅速采取应对措施。同时,通过长时间的统计分析,能够为市政建设的科学规划提供重要的数据参考依据。
7.网络接入应用:用过车辆节点间的多跳无线传输及车辆节点与路侧无线基站之间的无线通信,在车辆高速运行中,也能实现internet接入及多种互联网应用。
8.车联网在很多方面与传统的移动自组织网络(manet)有相似之处,如节点的移动性、中短距离无线通信、多跳数据传输等。但是,应该认识到车联网呈现出许多新的节点及网络特性,使车联网显著地区别于传统的移动自组织网络,意味着许多针对manet设计的已有方法不适用于车联网。
9.1)网络连通性差:manet系统中,网络的连通性好,任一节点与其他网络节点都是连通的。而在车联网中,节点的连通性很大程度上取决于车辆分布密度。在车辆集中的区域,节点能通信的邻居节点多,连通性较好;而在车辆不集中的区域,车辆通信的邻居节点数少,甚至只有该车辆本身。总之,在车辆网络中,不能假设整个网络是连通的。
10.2)网络拓扑结构变化快:车辆节点的移动性远大于manet节点,运动速度可达30m/s以上,导致车联网的拓扑结构变化迅速,网络拓扑特性稳定性差。
11.3)节点运动的随机性及受限性:车联网中的车辆节点受限于道路网络的拓扑结构,车辆只能在道路上行驶。同时,车辆节点的运动往往按照自己的意愿实施运动,节点的运动具有很大的随机性。
12.4)节点运动的规律性:基于节点运动的受限性,车辆运动不是完全随机毫无规律的。车辆节点通常沿道路直线行驶,只在交通路口改变行驶方向,并且车辆节点的运动区域也呈现一定的规律性。
13.5)动态与静态节点混合:在车联网中,不但有移动的车辆节点,还有安装于路侧的静态节点。车辆节点不但能与其他运动的车辆节点通信,还能与静态节点交换信息。而在manet中,节点一般都是移动的。
14.6)节点资源丰富:manet节点的资源如电能、存储空间等受限制,而在车辆节点上,节点资源较为丰富,特别是电力资源充沛,无需像manet系统的设计那样,必须考虑如何节省电能。
15.7)节点分布不均匀:在车联网内,节点的分布取决于车辆在实际道路网络中的分布,车辆的通常非均匀分布,跟地理位置及道路类型有较强相关性。在城市热点区域,车辆的密度高;在通行能力好的道路,如城市高架快速路,车辆的分布较为稀疏。
16.8)网络规模大:在车联网中,节点规模可能达到上千甚至上万,而在manet中,典型的节点数为几十或几百。车联网的节点规模远大于传统manet的节点规模。
技术实现要素:
17.本发明是为了解决目前的路由方法不能适用于车辆网络的问题,进而提出了一种自组织车联网的数据感知路由方法。
18.一种自组织车联网的数据感知路由方法,针对车联网网络,基于联合调度的车联网路由算法进行车联网中的数据路由;
19.所述的联合调度的车联网路由算法包括以下步骤:
20.车联网网络共需传输给定的一个数据包集,记为φ,每个数据包p的源节点记为δ(p)、目的节点记为ψ(p);不带下标的p用于表示数据包,带节点下标的p
i
(
·
)用于表示地理位置;
21.对于某个数据包p,把网络内所有该数据包的副本集合记为θ(p),称为数据包组;当该数据包发生一次无线传输时,该数据包组的大小增加1;
22.车联网网络整体的传输性能是单个数据包传输性能的函数,单个数据包的传输成功率ρ
p
:
23.ρ
p
=f
γ
(δ(p),ψ(p),{t
n
})
ꢀꢀꢀ
(4)
24.其中,{t
n
}表示所有节点的运动轨迹集合;f
γ
(
·
)表示传输成功率函数;
25.数据包p的传输时延σ
p
:
26.σ
p
(τ)=τ+γ
γ
(δ(p),ψ(p),{t
n
})
ꢀꢀꢀ
(5)
27.其中,γ
υ
(
·
)表示传输时延函数;
28.数据包p传输的代价为:
[0029][0030]
其中,|θ(p)|表示数据包组θ(p)容量;
[0031]
最优传输策略:最大化传输成功率、最小化传输时延和最小化网络代价:
[0032][0033][0034][0035]
其中表示期望;
[0036]
网络传输效率为:
[0037][0038]
用多阶马可夫链对车辆节点的位置变化过程进行建模,在给定前几个时刻位置的情况下,对未来下一时刻和若干个时刻进行预测估计;
[0039]
基于车辆节点的位置实际值和预测估计值,结合最优传输策略实现车联网中的数据路由。
[0040]
进一步地,所述车联网网络对应的车联网网络模型和群智感知模型如下:
[0041]
基于无向图构建车联网网络模型;针对车辆节点n在时间τ的地理位置表示为p
n
(τ),该节点从零时刻至τ时刻的运动轨迹进行离散化:
[0042]
t
n
=<p
n
(0),p
n
(1),...p
n
(τ)>
[0043]
其中,τ表示离散化后的时间;
[0044]
两个节点i和j之间在时间τ的距离距离表示为d
ij
(τ);当前车联网网络内所有可进行数据传输的链路表示为l(τ):
[0045][0046]
其中,l
i,j
表示节点i和j之间链路,r表示链路距离阈值;
[0047]
构建群智感知模型:车辆i得到的感知数据函数如下:
[0048]
δ(t,p
i
(t),i)
[0049]
其中,p
i
(t)表示车辆i在t时刻对应的地理位置。
[0050]
进一步地,所述车联网网络对应的车联网网络模型和群智感知模型如下:
[0051]
车联网网络模型的无向图g=(n,e),其中n是顶点集,每个顶点代表一个车辆节点,e是边的集合,e
n
′
=((i,j),c(t),d(t))是顶点i和j之间的一条边,表示两个节点之间的通信,c(t)表示节点i和j在c(t)时刻相遇,d(t)表示相遇持续时间。
[0052]
优选地,所述链路距离阈值r为400米。
[0053]
进一步地,用多阶马可夫链对车辆节点的位置变化过程进行建模的过程包括以下步骤:
[0054]
将车辆节点对应的整个位置空间分成q个网格,位置空间表示为s:
[0055][0056]
其中,s0,s1,..,s
q
‑1表示整个位置空间中的网格对应的位置空间,s
i
″
、s
j
″
分别表示
整个位置空间中的网格对应的位置空间;
[0057]
在某一时刻,一辆车i的位置取s中的某个值,记为s
i
;通过位置随机变量s
i
的信息熵和条件信息熵确定车辆运动的时空相关性:
[0058]
对于车辆i,假设观察l个时刻车辆i的位置,车辆的位置序列表示为:t
i
=<s0,s1,..,s
l
‑1>;假设车辆i在序列中位置s
j
″
出现o
j
″
次,s
i
的边际信息熵:
[0059][0060]
在给定前一时刻位置变量s
i
的条件信息熵如下:
[0061][0062]
其中联合位置随机变量的信息熵如下:
[0063][0064]
其中,o
j
″‑
1,j
″
表示车辆在序列中位置s
j
″‑1和s
j
″
出现次数;
[0065]
基于同样的方法,得到给定前k个时刻位置变量的条件信息熵:
[0066][0067]
基于多阶马可夫链对车辆节点的位置进行预测估计。
[0068]
优选地,将车辆节点对应的整个位置空间分成q个网格对应网格大小为200m
×
200m。
[0069]
一种自组织车联网的数据感知路由系统,所述系统用于执行所述的一种自组织车联网的数据感知路由方法方法。
[0070]
一种存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的一种自组织车联网的数据感知路由方法。
[0071]
一种设备,所述设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的一种自组织车联网的数据感知路由方法。
[0072]
有益效果:
[0073]
本发明可以不仅可以很好的解决车辆网络连通性差的问题,而且可以适应车联网网络拓扑结构变化快的特点,可以很好的解决数据包在车辆网络中的路由问题,实现车辆网络内的通信。
附图说明
[0074]
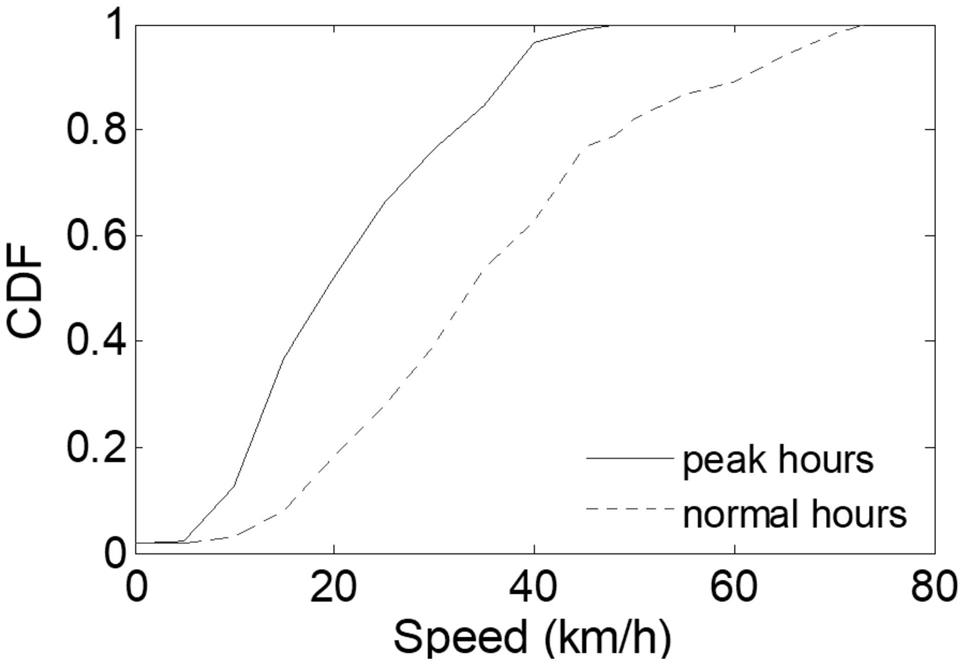
图1为车辆速度cdf分布图;
[0075]
图2为车辆相遇时间分布图;
[0076]
图3为车联网节点抽象模型示意图;
[0077]
图4为链路调度与数据包调度示意图。
具体实施方式
[0078]
具体实施方式一:
[0079]
本实施方式为一种自组织车联网的数据感知路由方法,包括以下步骤:
[0080]
s1、收集大规模真实车辆运行数据并构建网络与感知模型:
[0081]
本实施例使用的数据为深圳市10000余辆出租车及3000余辆公交车真实运行数据,即车辆细粒度位置跟踪数据和车辆实时方位及速度感知数据,时间015年1月至2016年12月。
[0082]
车辆节点安装gps位置及速度感知设备,实时获取节点位置信息、运行方向及瞬时运动速度,出租车辆节点还能获取车辆节点的载客情况(即空载或重载)。车辆节点的感知数据的数据结构描述如下:
[0083]
vehicle idlongitudelatitudespeedangletimestampstatus
[0084]
其中vehicle id是车辆的唯一标识、longitude和latitude分别是节点瞬时的经纬度信息、speed是车辆的瞬时速度、angle是车辆节点的瞬时运行方向、timestamp是感知数据记录的时刻、status表示车辆的状态信息,对于出租车来说表示车辆的载客情况。车辆节点的运行范围覆盖整个深圳市市区,覆盖性面积达400多平方公里。每10秒至几分钟车辆节点会产生一次感知数据并将感知数据通过gprs无线数据信道传回数据中心,具体的间隔时间因车辆不同而不同,具有较大的不均匀性。另外,由于无线数据信道的不可靠性,感知数据在传输过程中可能会丢失。由这些车辆贡献的真实运行数据规模巨大,压缩后的数据规模达112gb。
[0085]
在城市环境下,由于高楼大厦及高架桥等高大建筑物的影响,grs的定位数据可能会有较大的误差,误差从几米至几百米不等。根据深圳市电子地图的道路信息及车辆节点运动的连续性,将错位位置进行纠正(map
‑
matching)。
[0086]
通过对大规模深圳市车辆运行数据的分析,可以发现并证实车联网的许多独特性,包括网络连通性差、节点分布不均匀等,以及出租车的分布不均匀;网络的拓扑结构与节点的无线通信距离(r)和网络总节点数密切相关,在车辆节点数为1000,通信距离为200米的条件下,网络拓扑结构较离散,对于任意一对节点来说,基本上没有连通的路径;当通信距离增长到400米时,网络的连通性得到极大改善,并可以看到多个连通性较好的簇。
[0087]
在保持通信距离不变,增加网络总节点数时,网络的连通性也能得到改善,并且也能明显看到多个连通性较好的簇。不过,即使在网络节点数为2000、通信距离为400米的良好条件下,车辆网络内还是有许多不连通的子网,即在车辆网络中,网络的不连通性是一个常态。
[0088]
在车联网中,当前车辆与其他车辆的通信能力,与多个因素相关,包括车辆的速度、车辆分布密度及车辆相遇时间分布等,车辆分布密度及车辆相遇时间分布如图1和图2所示。通过对深圳市出租车数据的分析。选取2007年10月13日的两个时间段,分别为高峰时段早上8:00
‑
9:00,非高峰时段下午3:00
‑
4:00,在高峰时段95%车辆的运行速度在40km/h以下,在非高峰时段,65%车辆的速度在40km/h以下。在通信距离为100米的条件下,在非高峰时段,60%车辆间的相遇时间在10s以下,在高峰时段,65%车辆间的相遇时间在20s以下。
[0089]
首先建立车联网网络模型及群智感知模型,车联网网络模型及群智感知模型对车
联网及上层群智感知应用的设计与开发有至关重要的作用。
[0090]
车联网的网络连通性能界于manet和容迟网络(dtn)之间。通常认为manet网络的连通性良好,任意时刻两个节点之间存在一条连通的路径。而dtn网络中,网络连通性很差,绝大部分时间节点是隔离不连通的,节点之间偶尔会相遇(contact),形成无线通信的机会。
[0091]
基于这样的认识,本发明提出如下的车联网抽象模型:车联网在时间区间(0,t)内的网络抽象模型可以定义为一个无向图g=(n,e),其中n是顶点集,每个顶点代表一个车辆节点,e是边的集合,e
n
′
=((i,j),c(t),d(t))是顶点i和j之间的一条边,表示两个节点之间的通信,如图3所示,c(t)代表i和j在c(t)时刻相遇,相遇持续时间是d(t)。d(t)决定了节点i和j在本次相遇是能进行的通信能力,值越大说明本次相遇两节点的传输能力越大。
[0092]
单个车辆节点n在(0,t)时间内在城市路网内行驶。在简化情况下,其地理位置p
n
(t)是一个在二维平面上的连续曲线,p
n
(t)的可能取值是在二维平面上的道路及可能的停车地点。此反映了车辆节点的运动受限于道路网络,节点运动不具备任意性。
[0093]
当采用离散化时间,车辆节点n在时间τ表示为p
n
(τ)。该节点从零时刻至τ时刻的运动轨迹可以表示为:
[0094]
t
n
=<p
n
(0),p
n
(1),...p
n
(τ)>
ꢀꢀꢀ
(1)
[0095]
其中,τ表示离散化时间后的时间;
[0096]
两个节点i和j之间在时间τ的距离距离表示为d
ij
(τ)。当前车联网网络内所有可传输的链路表示为l(τ):
[0097][0098]
其中,l
i,j
表示节点i和j之间链路,r表示可传输的链路距离阈值;
[0099]
建立群智感知模型是进行高层群智感知应用优化设计的基础。本发明提出如下群智感知模型。车辆i得到的感知数据是一个函数,如下所示:
[0100]
δ(t,p
i
(t),i)
ꢀꢀꢀ
(3)
[0101]
其中,p
i
(t)表示车辆i在t时刻对应的地理位置;
[0102]
收集的感知数据与数据产生的时间相关、与节点的位置相关,也与车辆本身相关。
[0103]
s2、构建基于联合调度的车联网路由算法:
[0104]
在车联网中高效的路由算法起基础性作用,决定车辆节点之间的数据传输性能,路由性能指标包括传输成功率、传输时延、网络吞吐量及数据传输效率等。基于车联网的各种高层应用都建立在高效的路由方法之上,所以设计高效的路由算法对车联网的起关键性作用。
[0105]
不过,为车联网设计高效的路由算法面临众多的挑战。首先,不同于传统的移动自组织网络,车辆网络的连通性差,在某一时刻,源和目的节点之间可能不存在一条连通的路径。其次,由于车辆网络中节点分布的不均匀性,不同于容迟网络,车辆网络的拓扑虽然是不连通的,但是网络局部有较好的连通性,甚至存在多条相互竞争的无线链路。最后,车辆节点的移动速度快,可以达30m/s以上,而且节点运动存在很大随机性,节点未来运动的轨迹存在很大不确定性。
[0106]
为研究车联网的最优路由算法,可建立路由系统模型如下:
[0107]
车联网网络共需传输给定的一个数据包集,记为φ,每个数据包p的源节点记为δ(p)、目的节点记为ψ(p)。p和p
i
(
·
)为不同含义的参数,其中不带下标的p用于表示数据包,带节点下标的p
i
(
·
)等用于表示地理位置;
[0108]
当数据包在某条无线链路转发后,可以认为数据包从一个节点复制给另外一个节点(考虑到车辆节点的存储能力较大)。对于某个数据包p,把网络内所有该数据包的副本集合记为θ(p),称为该数据包组。当该数据包发生一次无线传输时,该数据包组的大小增加1。
[0109]
车联网网络整体的传输性能是单个数据包传输性能的函数,可以首先考察单个数据包的传输性能,再进而研究网络的传输性能。
[0110]
单个数据包的传输成功率ρ
p
是由多个因素决定的,包括路由策略和所有节点的运动轨迹:
[0111]
ρ
p
=f
γ
(δ(p),ψ(p),{t
n
})
ꢀꢀꢀ
(4)
[0112]
其中,{t
n
}表示所有节点的运动轨迹集合;f
γ
(
·
)表示传输成功率函数;
[0113]
当给定节点的运动轨迹和传输策略后,该成功率可以在一开始便可以确定。但是现实情况下,节点未来的运动轨迹是不可知的,所以传输成功率可以认为是一个随机变量。
[0114]
数据包p的传输时延σ
p
是所有网络内传输时间的总和,该时间可以分成两个部分,一部分是已经确定的,另一部分是未来需要使用且还未确定的。类似与传输成功率分析,可以得到:
[0115]
σ
p
(τ)=τ+γ
γ
(δ(p),ψ(p),{t
n
})
ꢀꢀꢀ
(5)
[0116]
其中,γ
γ
(
·
)表示传输时延函数;
[0117]
数据包p传输的代价为传输该数据包过程中产生的传输次数的总和。因每次传输包集合θ(p)的大小增加1,所以最终θ(p)的大小也是p的传输代价:
[0118][0119]
其中,|θ(p)|表示数据包组θ(p)容量;
[0120]
最优传输策略的设计目标如下,最大化传输成功率、最小化传输时延和最小化网络代价:
[0121][0122][0123][0124]
其中表示期望。
[0125]
网络传输效率为:
[0126][0127]
以最大化传输成功率为例,优化目标可以写成:
[0128][0129]
需要确定传输策略就需要确定所有节点的运动轨迹。
[0130]
在manet中,数据传输的核心问题是链路调度问题,即决定网络内哪些无线链路可
以进行无线通信,因为不同链路之间存在无线冲突问题,好的路由算法需减少冲突,实现网络内最大吞吐量的数据传输。在dtn网络中,节点与节点之间大部分时间是不连通的,只有在两节点相遇(contact)时,两节点才有机会实现数据通信。dtn数据传输的核心问题是数据包调度问题,即在节点资源受限的条件下,决定两个节点在相遇时交换哪些数据包。
[0131]
车联网内点到点数据传输和路由的核心问题是链路调度和数据包调度。链路调度与数据包调度示意图如图4所示,图4内虚线表示所有可能的无线链路,链路调度的结果是bc链路被激活并进行无线通信。此时,b节点上有多个待传输的数据包,数据包调度的任务是从待传输的数据包中选择数据包,放在链路bc上传输,因为b与c节点能进行通信的时间可能比较短暂,只能传输有限个数据包。
[0132]
本发明提出面向联合调度的最优化路由算法,联合考虑链路调度和数据包调度。在最优化联合调度设计中,节点的运动轨迹是优化设计的关键。可是在实际情况下,节点的未来轨迹是不可以预知的,这成为联合调度设计的难点。不过,经过对深圳市车辆大规模运行数据的分析,本发明发现城市环境下车辆运动的轨迹具有很强的规则性。基于该规则性,可以对车辆节点未来的运动轨迹做出较准确的预测,为联合调度及路由决策提供了重要支持。
[0133]
本发明对深圳市出租车的轨迹数据进行了分析,展示车辆节点的运动具有很强的时空相关性。为了简单起见,整个位置空间分成q个网格,所以位置空间可以表示为s:
[0134][0135]
其中,s0,s1,..,s
q
‑1表示整个位置空间中的网格对应的位置空间,s
i
″
、s
j
″
分别表示整个位置空间中的网格对应的位置空间;
[0136]
在某一时刻,一辆车i的位置取s中的某个值,记为s
i
;本发明通过分析位置随机变量s
i
的信息熵(entropy)和条件信息熵(conditional entropy),来认识车辆运动的时空相关性。
[0137]
对于车辆i,假设观察l个时刻车辆i的位置,该车的位置序列表示为:t
i
=<s0,s1,..,s
l
‑1>。假设车辆i在序列中位置s
j
″
出现o
j
″
次,那么s
i
的边际信息熵的计算方法如下:
[0138][0139]
在给定前一时刻位置变量s
i
的条件信息熵如下:
[0140][0141]
其中联合位置随机变量的信息熵如下:
[0142][0143]
其中,o
j
″‑
1,j
″
表示车辆在序列中位置s
j
″‑1和s
j
″
出现次数;
[0144]
基于同样的方法,还可以计算给定前k个时刻位置变量的条件信息熵:
[0145][0146]
确定车辆位置随机变量的边际信息熵和条件信息熵的cdf(累计分布),本实施方式中设置网格大小设置为200m
×
200m,节点数目控制为500。
[0147]
可以确定,条件信息熵比边际信息熵要小很多,意味着位置变量的不确定小,这说明在给定前一时刻位置的情况下,当前时刻的位置变量的不确定性大大降低了。还可以观察到,在多给定前几个时刻位置的情况下,条件信息熵进一步减小,说明给定前几个时刻能够减小当前时刻位置的不确定性。不过,也可以看到条件熵的减少趋势程度迅速变慢,说明给定前多个时刻的位置信息,对确定当前时刻的位置帮助不会太大。
[0148]
基于上述的分析,用多阶马可夫链(multi
‑
order markov chains)对车辆节点的位置变化过程进行建模,在给定前几个时刻位置的情况下,对未来下一时刻和若干个时刻进行预测估计。
[0149]
基于车辆节点的位置实际值和预测估计值,结合最优传输策略实现车联网中的数据路由。
[0150]
利用本发明的路由方法,可以实现部署在路侧的基站与车辆节点以及车辆节点之间的通信,进而可以对路况进行感知、预测交通路况。
[0151]
具体实施方式二:
[0152]
本实施方式为一种自组织车联网的数据感知路由系统,所述系统用于执行所述的一种自组织车联网的数据感知路由方法方法。
[0153]
具体实施方式三:
[0154]
本实施方式为一种存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的一种自组织车联网的数据感知路由方法。
[0155]
本实施方式所述的存储介质包括但不限于独立的存储器、设置在计算机内部的存储器等。
[0156]
具体实施方式四:
[0157]
本实施方式为一种设备,所述设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的一种自组织车联网的数据感知路由方法。
[0158]
本实施方式所述的设备包括但不限于pc机、服务器、移动设备以及专门开发的单片机等。
[0159]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1