多设备的角度定位和用户识别方法与流程
本发明涉及一种多设备的角度定位和用户识别方法,属于定位。
背景技术:
1、物联网(internet of things,简称iot)是指通过各种信息传感器、射频识别技术、全球定位系统、红外感应器、激光扫描器等各种装置与技术,实时采集任何需要监控、连接、互动的物体或过程,采集其声、光、热、电、力学、化学、生物、位置等各种需要的信息,通过各类可能的网络接入,实现物与物、物与人的泛在连接,实现对物品和过程的智能化感知、识别和管理。物联网是一个基于互联网、传统电信网等的信息承载体,它让所有能够被独立寻址的普通物理对象形成互联互通的网络。
2、而在物理网场景中,设备与设备、控制设备与场景设备之间的智能交互基于无线通讯连接实现,但无线通讯仅能实现基础的连接控制,不能完成许多个性化和智能化的操作,而上述操作都基于设备之间的位置感知,并结合无线通讯实现。目前,由于室内场景难以收到卫星定位信号,需要在室内采用其他的定位方式,鉴于超声波的低成本、高精度等优点,使用声波定位实现室内设备之间的位置感知,但是,当手持/佩戴移动设备与环境中的大量设备交互时,对于移动设备来说,同时收到了大量的定位信号,既难以识别定位信号的归属方,又难以归集同一信号对应不同接收端的数据,导致对相对位置的解算困难。
技术实现思路
1、本发明的目的是提供一种多设备的角度定位和用户识别方法,该方法解决了现有技术中多设备同步定位时,用户识别困难,不同接收端数据难以匹配,导致定位功能无法实现的问题。
2、为达到上述目的,本发明采用的技术方案是:一种多设备的角度定位和用户识别方法,所述方法包括:
3、信号设计:使用ofdm结构信号,将若干个用户分别搭载于约定的子载波上形成不同的定位信号;
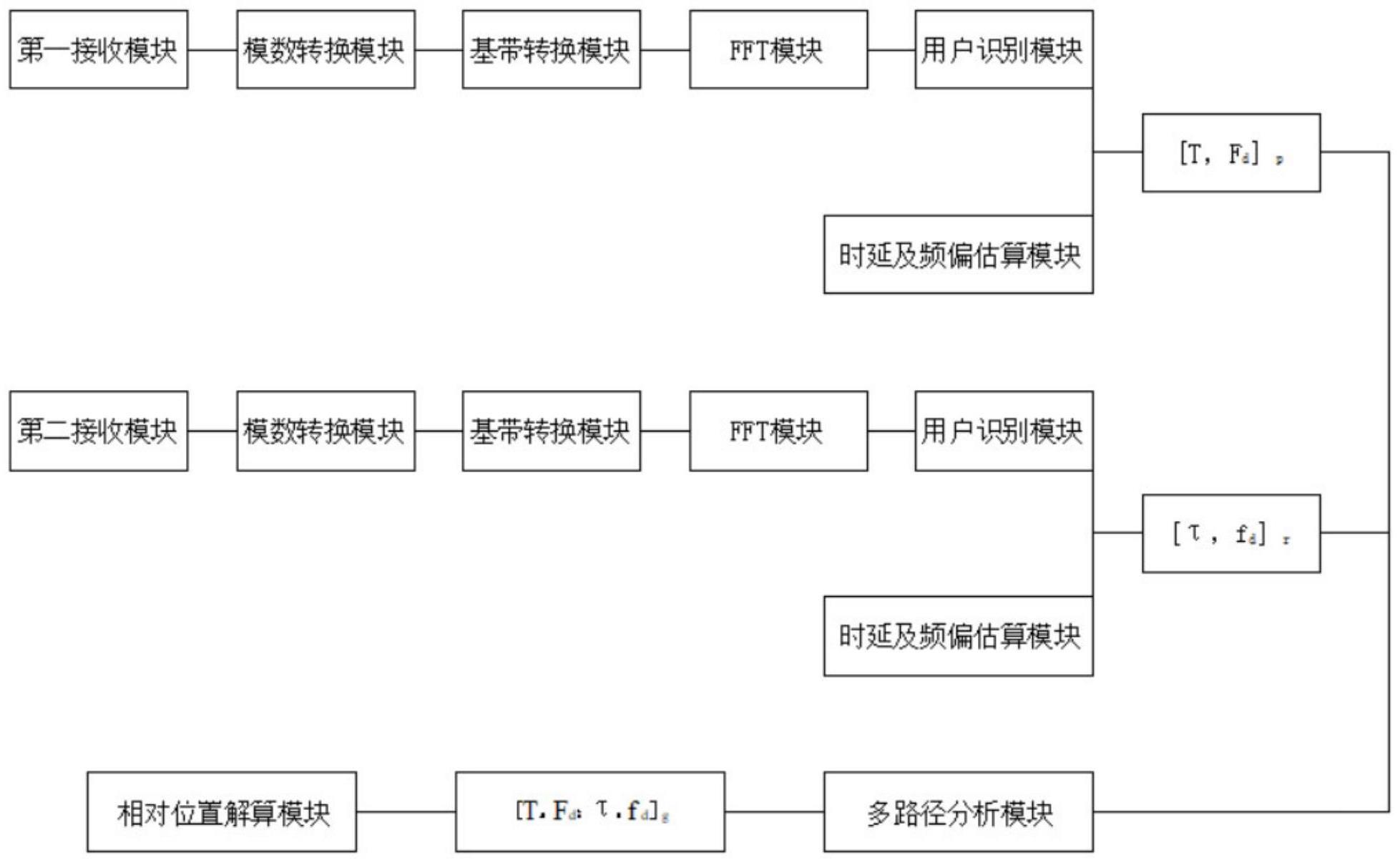
4、定位感知:用户发出定位信号,若干个定位信号分别被移动设备上安装的第一接收模块和第二接收模块收到,所述第一接收模块收到的信号为m1、m2、m3……,解算得到[t,fd]p组,其中,t为定位信号时延,fd为定位信号多普勒频移,所述第二接收模块收到的信号为m1、m2、m3……,解算得到[τ,fd]r组,其中,τ为定位信号时延,fd为定位信号多普勒频移,比对[t,fd]p和[τ,fd]r,找到同一定位信号的对应[t,fd:τ,fd]g组,识别用户并解算得到若干个用户相对移动设备的位置。
5、上述技术方案中进一步改进的方案如下:
6、1.上述方案中,所述定位信号为超声波定位信号。
7、2.上述方案中,所述用户为多个,所述移动设备为1个。
8、3.上述方案中,所述不同用户的子载波之间具有保护带宽。
9、4.上述方案中,判断[t,fd]p和[τ,fd]r属于同一定位信号的方法为:
10、第一步:找到与fd1最接近的fdh,h为1~r中的值;
11、第二步:若|t1-τh|·c≤d,即判断[t,fd]1和[τ,fd]h属于同一定位信号,并记录归集;
12、若|t1-τh|·c>d,则排除fdh,找到剩余数据中最接近fd1的fdo,o为1~r中的值;
13、若|t1-τo|·c≤d,即判断[t,fd]1和[τ,fd]o属于同一定位信号,并记录归集;
14、反之,则循环进行上述步骤,直至得到满足条件的对应组;
15、将所有[t,fd]代入上述步骤,直至得到所有[t,fd]p和[τ,fd]r的对应关系并记录存储;
16、其中,c为定位信号传播速度,d为移动设备上第一接收模块和第二接收模块的最短距离。
17、5.上述方案中,若有两个[τ,fd]满足任一[t,fd]的同组判断条件,选择相关峰能量更大的一个[τ,fd]。
18、6.上述方案中,所述用户相对移动设备的位置包括相对角度θ,
19、7.上述方案中,所述用户相对移动设备的位置包括距离,所述第一接收模块与用户的距离为l1=t·c,所述第二接收模块与用户的距离为l2=τ·c。
20、8.上述方案中,所述定位信号多普勒频移的估算方法为:
21、所述用户于第一时刻发出实值信号x(λ)后;
22、所述第二接收模块于第二时刻采集得到接收信号,记为y(λ),x(λ)、y(λ)均为基带时域信号;
23、通过配置的处理器得到:其中,τ′=第二时刻-第一时刻;
24、通过所述处理器对接收信号做快速傅里叶变换得到:y(n)=x(n-fd)ej2πτn,n=1,2……n;
25、建立新函数:y(1:n-1)·conj(y(2:n))=x((1:n-1)-fd)·x*((2:n)-fd)·ej2πv;筛除常数ej2πτ,输出x((1:n-1)-fd)·x*((2:n)-fd);
26、使用实值信号建立无频偏的新函数:x(1:n-1)·x*(2:n);
27、通过处理器将x(k-fd)·x*((k+1)-fd)及x(k)·x*(k+1)代入互相关函数,得到频偏fd=b-a,其中,原峰值点在a处,偏移后的峰值点在b处,输出频偏;
28、其中,k=1:n-1。
29、9.上述方案中,所述定位信号时延的修正方法为:
30、使用频偏修正y(λ),得到y(λ)new,将y(λ)new和x(λ)代入互相关函数,修正τ’得到τ。
31、由于上述技术方案的运用,本发明与现有技术相比具有下列优点:
32、1、本发明多设备的角度定位和用户识别方法,通过约定搭载子载波信号,将不同的用户放在同一信号结构的不同位置,便于移动设备通过约定协议识别用户,同时,利用移动设备尺寸远小于定位尺寸、运动速度远小于应用场景的约束特性,比对不同接收模块收到定位信号的时延和多普勒频偏,即可找到同一定位信号对应的两组时延和多普勒频偏数据,从而得到精确的用户相对移动设备的位置,超声定向抗干扰能力更强、且扩大了超声定位可容纳的用户量。
33、2、本发明多设备的角度定位和用户识别方法,通过在不同用户的子载波之间加入保护带宽,不同用户的子载波便不会相互干扰,而且在接收模块处可以很容易把不同用户的子载波再分割开来。
34、3、本发明多设备的角度定位和用户识别方法,通过构建满足互相关函数,得到多普勒频移,用以修正接收信号,再利用修正后的接收信号构建满足互相关函数,反向修正时延,消除误差,得到更为精确的时延值,提高定位精度。
技术特征:
1.一种多设备的角度定位和用户识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的多设备的角度定位和用户识别方法,其特征在于,所述定位信号为超声波定位信号。
3.根据权利要求1所述的多设备的角度定位和用户识别方法,其特征在于,所述用户为多个,所述移动设备为1个。
4.根据权利要求1所述的多设备的角度定位和用户识别方法,其特征在于,所述不同用户的子载波之间具有保护带宽。
5.根据权利要求1所述的多设备的角度定位和用户识别方法,其特征在于,判断[t,fd]p和[τ,fd]r属于同一定位信号的方法为:
6.根据权利要求5所述的多设备的角度定位和用户识别方法,其特征在于,若有两个[τ,fd]满足任一[t,fd]的同组判断条件,选择相关峰能量更大的一个[t,fd]。
7.根据权利要求5所述的多设备的角度定位和用户识别方法,其特征在于,所述用户相对移动设备的位置包括相对角度θ,
8.根据权利要求5所述的多设备的角度定位和用户识别方法,其特征在于,所述用户相对移动设备的位置包括距离,所述第一接收模块与用户的距离为l1=t·c,所述第二接收模块与用户的距离为l2=τ·c。
9.根据权利要求1所述的多设备的角度定位和用户识别方法,其特征在于,所述定位信号多普勒频移的估算方法为:
10.根据权利要求9所述的多设备的角度定位和用户识别方法,其特征在于,所述定位信号时延的修正方法为:
技术总结
本发明公开了一种多设备的角度定位和用户识别方法,所述方法包括:用户发出定位信号,所述第一接收模块收到的信号为M<subgt;1</subgt;、M<subgt;2</subgt;、M<subgt;3</subgt;……,解算得到[T,F<subgt;d</subgt;]<subgt;p</subgt;组,所述第二接收模块收到的信号为m<subgt;1</subgt;、m<subgt;2</subgt;、m<subgt;3</subgt;……,解算得到[τ,f<subgt;d</subgt;]<subgt;r</subgt;组,比对[T,F<subgt;d</subgt;]<subgt;p</subgt;和[τ,f<subgt;d</subgt;]<subgt;r</subgt;,找到同一定位信号的对应[T,F<subgt;d</subgt;:τ,f<subgt;d</subgt;]<subgt;g</subgt;组,识别用户并解算得到若干个用户相对移动设备的位置。本发明利用移动设备尺寸远小于定位尺寸、运动速度远小于应用场景的约束特性,比对不同接收模块收到定位信号的时延和多普勒频偏,找到同一定位信号对应的两组时延和多普勒频偏数据,从而得到精确的用户相对移动设备的位置。
技术研发人员:向玮晨
受保护的技术使用者:苏州触达信息技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!