一种车载智能反射表面辅助的反向散射通信系统
:
1.本发明是一种车载智能反射表面辅助的反向散射通信系统,属于无线通信网络技术领域。
背景技术:
:
2.随物联网技术的迅速发展,其所包含的传感器数量将呈几何倍数增长,如何保持大量能源受限的物联网传感器的存活状态成为主要挑战。低功耗和低复杂性的反向散射通信仅仅依赖入射射频(rf)波的无源反射和调制,故被用于应对这一挑战。
3.反向散射标签由射频能量供电,不需要任何有源射频元件。标签通过对射频(rf)信号进行被动调制进行通信,故而可省略主动射频传输链路。双基地反向散射体系结构由一个发射正弦信号的载波发射器(ce)和一个单独定位的接收机组成,其允许为放置在射频源附近的标签扩展通信范围,然而这通常需要载波发射器以高功率发射,或是部署在标签附近。
4.智能反射表面ris以其对无线信道的控制能力,低功耗,低成本等特性,被用于辅助低功耗、物联网型网络,以显著提高通信系统性能。智能反射表面由许多反射元件组成,每个反射元件都对入射信号施加一个可控的相移。相移可以联合优化,已在接收机处获得巨大收益。
5.智能反射表面已被证实可用于辅助反向散射通信,以来解决反向通信技术中存在的传输距离短、覆盖有限、数据传输速率低的瓶颈。然而现有文献考虑的固定智能表面的场景忽略了智能反射表面部署位置对反向散射通信系统的影响。
技术实现要素:
6.鉴于此,本发明提供一种车载智能反射表面辅助的反向散射通信系统,以接收机接收来自每个反向散射标签的标签信号的信干噪比要求为约束,以使射频源能量效率最大化为目标,确定车载智能反射表面的部署位置以及其中反射单元的相移。为实现上述技术的目的,本发明采用如下方案:
7.一种车载智能反射表面辅助的反向散射通信系统,该系统由一个射频源、一个接收机,一个车载智能反射表面和k个反向散射标签组成;其中,射频源向k个反向散射标签发送载频信号,载频信号可经智能反射表面到反向散射标签或直接由射频源发送至标签,k个反向散射标签分别向车载智能反射表面发送标签信号,标签信号可经车载智能反射表面反射后或直接被接收机接收,完成反向散射通信;
8.装载车载智能反射表面的车辆在指定路段上以车身长度为单位移动,使用 l表征车载智能反射表面的当前位置,length表征车身长度。
9.进一步地,以接收机接收来自每个反向散射标签的标签信号的信干噪比要求为约束,以使射频源能量效率最大化为目标,确定车载智能反射表面的部署位置以及其中反射单元的相移。
10.进一步地,k个反向散射标签的反向散射链路共享时频资源,存在相互干扰。
11.进一步地,该系统中反向散射标签与智能反射表面之间、射频源与反向散射标签之间、智能反射表面与接收机之间的链路的信道系数均服从莱斯衰落模型。
12.进一步地,接收机接收来自反向散射标签k的标签信号的信干噪比的表达式为:
[0013][0014]
其中,w表示由射频源发送给所有反向散射标签的载频信号在射频源处的线性预编码向量;表示接收机解码来自反向散射标签s、k处的标签信号所采用的线性预编码;为服从瑞利分布的噪声的功率;bs(t)、 bk(t)为反向散射标签s、k处的基带信号;αs∈[0,1]、αk∈[0,1]表示反向散射标签s、k处的分裂系数;表示车载智能反射表面处的反射系数矩阵,θn∈[0,2π]表示第n个反射单元的相移;∈[0,2π]表示第n个反射单元的相移;分别表示反向散射标签k与智能反射表面之间、反向散射标签k与接收机之间、射频源与反向散射标签k之间、智能反射表面与接收机之间、射频源与智能反射表面之间的信道系数矩阵;射表面与接收机之间、射频源与智能反射表面之间的信道系数矩阵;分别表示反向散射标签s与智能反射表面之间、反向散射标签s与接收机之间、射频源与反向散射标签s之间的信道系数矩阵;c表示射频源配备的天线数,n表示车载智能反射表面的反射单元数,m表示接收机配备的天线数。
[0015]
进一步地,射频源发送的载频信号中,分数αk的载频信号上加载反向散射标签自身信号后反射出去,分数1-αk的载频信号用于供电,进而得到反向散射标签k处电路约束的表达式为:
[0016][0017]
其中β∈[0,1]表示能量转换效率;ξk表示反向散射标签k处电路所需的能量。
[0018]
进一步地,射频源能量效率的表达式为:
[0019][0020]
其中,为射频源的发射功率。
[0021]
进一步地,以接收机接收来自每个反向散射标签的标签信号的信干噪比要求为约束,以使射频源能量效率最大化为目标,建立以下射频源能量效率最大化模型,以确定车载智能反射表面的部署位置以及其中反射单元的相移:
[0022][0023][0024]
[0025][0026][0027][0028]
其中,η
l
表示车载智能反射表面的位置为l时,射频源的能量效率;γ
k,l,th
表示车载智能反射表面的位置为l时,接收机接收来自反向散射标签k的标签信号的信干噪比的下限;
[0029]
将射频源能量效率最大化模型改写为:
[0030][0031]
其中,
[0032]
进一步,引入松弛变量{δk}表示标签k处的电路约束的可实现值与其要求值ξk之间的差异,使用mm算法将改写后的模型转换为如下问题:
[0033][0034][0035][0036][0037][0038][0039]
其中,其中,表示的主对角线元素为1,表示是半正定矩阵,是半正定矩阵,i是单位矩阵,l是lipschitz常数,
[0040]
进一步地,对任意位置l,求解对应的射频源能量效率最大化模型以及模型转换后的问题,得到任意位置l处的车载智能反射表面处的最优相移矩阵和最大射频源能量效率;在求得的所有位置对应的最大射频源能量效率中再取最大值,以此最大值对应的位置作为全路段车载智能反射表面的最佳部署位置。
[0041]
进一步地,求解对应的射频源能量效率最大化模型以及模型转换后的问题的具体步骤如下:
[0042]
s1.令外迭代数i=1,内迭代数j=1,以作为迭代的起始向量;初始化车载智能反射表面的当前位置l=0,全路段最大能量效率η
max
=0,车载智能反射表面最佳部署位置l
*
=0;
[0043]
s2.计算tk和uk;
[0044]
s3.使用cvx工具箱求解问题,获得的最佳值
[0045]
s4.对进行特征值分解,即其中λ是矩阵的特征向量组成的矩阵,d是对角线上的元素为特征值的对角矩阵;
[0046]
s5.初始化循环序数q=1,根据randa随机搜索技术,生成向量
[0047]
s6.计算中间变量删除的最后一个元素得到
[0048]
s7.若q≤ρ继续循环,则q=q+1,返回s5;若q>ρ,则结束循环,进入s8;其中,ρ为预先指定的随机循环次数;
[0049]
s8.将集合中使得使不等式约束左边超过右边最多的元素作为下一次迭代的起始向量,其中,
[0050]
s9.重复s2到s8,直至收敛,获得当前位置 l的最优相移和最大的能量效率
[0051]
s10.若则l
*
←
l;
[0052]
s11.更新车辆当前位置l=l+length,若l≤l
max
,则返回s2;若l>l
max
,输出得到任
意位置处的车载智能反射表面处的最优相移矩阵和最大射频源能量效率;其中,length表征车身长度。
[0053]
本发明提供了一种车载智能反射表面辅助的反向散射通信系统,考虑了智能反射表面的部署位置对通信系统性能的影响,以接收机接收来自每个反向散射标签的标签信号的信干噪比要求为约束,以使射频源能量效率最大化为目标,确定车载智能反射表面的部署位置以及其中反射单元的相移。
附图说明:
[0054]
图1为本发明实施例的车载智能反射表面辅助的反向散射通信系统示意图;
[0055]
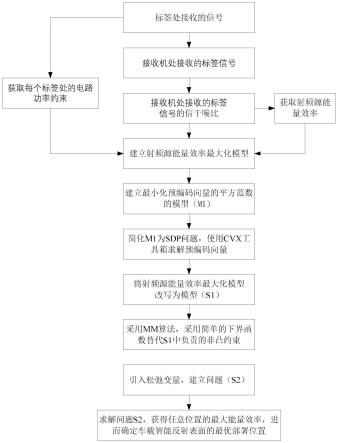
图2为车载智能反射表面辅助的反向散射通信系统能量效率最大化模型建立方法;
[0056]
图3为车载智能反射表面辅助的反向散射通信系统能量效率最大化模型求解方法。
[0057]
具体实施方法:
[0058]
为使本发明的目的和技术方案更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述。
[0059]
根据本发明实施例提供的一种车载智能反射表面辅助的反向散射通信系统,本例的系统模型如图1所示,该系统由一个射频源、一个接收机,一个车载智能反射表面和k个反向散射标签组成。其中射频源配备c根天线,智能反射表面配备n个反射单元,接收机配备m根天线。
[0060]
装载智能反射表面的车辆可在道路上移动,具备一定灵活性,以寻找使反向散射通信系统性能最优的部署位置;载具车辆在指定路段[0,l
max
]上以车身长度为单位向前移动,并使用l表征当前位置,length表征车身长度。本发明中分别使用f、t、i、r表示射频源、标签、智能反射表面和接收机。
[0061]
如图1所示,实线部分表示载频信号,虚线部分表示标签信号。图1展示了本发明所考虑的所有的传播路径,即本发明不考虑经过两次及以上反射的信号(由智能反射表面反射的除外)。射频源向k个反向散射标签发送载频信号,载频信号可经智能反射表面到反向散射标签或直接由射频源发送至标签,k个反向散射标签分别向车载智能反射表面发送标签信号,标签信号可经车载智能反射表面反射后或直接被接收机接收,完成反向散射通信。其中k个反向散射标签的反向散射链路共享时频资源,存在相互干扰。
[0062]
车载智能反射表面辅助的反向散射通信系统能量效率最大化模型建立方法,如图2所示,具体步骤如下:
[0063]
步骤201:考虑车辆处于位置l的固定场景,假设在射频源处使用线性预编码,即使用预编码向量w将信号s(t)发射到所有标签,则发射信号可写做 xc=ws(t)。因此,射频源发射功率p=||w||2。在标签k处接收的信号由射频源-标签视距链路和智能反射表面的转发链路组成,由以下公式给出:
[0064][0065]
因不执行信号处理操作,故不考虑噪声因素。其中表示智能
反射表面处的反射系数矩阵,θn∈[0,2π]表示第n个反射单元的相移;分别表示标签k 与智能反射表面irs、标签k与接收机、射频源与标签k、智能反射表面与接收机、射频源与智能反射表面之间的信道系数矩阵,此处假设所有信道系数均服从莱斯衰落模型。上述所有参数均会随位置l的变化而改变。
[0066]
步骤202:定义αk∈[0,1]表示标签k处的分裂系数,即标签要反射的入射信号的分数,剩下的1-αk信号能量用于为电路供电,则标签反射的信号部分由给出,其中bk(t)为标签的基带信号,剩余部分用于为电路供电,能量由给出,其中β∈[0,1]是能量转换效率。为了简单起见,β是一个常数,在所有标签中都相等。因此,电路功率约束的表达式如下:
[0067][0068]
其中ξk表示标签k处所需的能量。
[0069]
步骤203:车辆处于位置l时,接收机已知射频源的信号,可以进行直接解码消除,此时接收机处的接收信号可以表示为
[0070][0071]
其中nr=[n
r,1
,...,n
r,m
]
t
是接收机处的噪声向量,服从分布;表示接收机解码来自标签k处的信号所采用的线性预编码,gk的集合用表示。
[0072]
步骤204:接收机接收来自反向散射标签k的标签信号的信干噪比的表达式为:
[0073][0074]
l表征车载智能反射表面的当前位置;表示接收机解码来自反向散射标签s、k处的标签信号所采用的线性预编码;为服从瑞利分布的噪声的功率;bs(t)、bk(t)为反向散射标签s、k处的基带信号;αs∈[0,1]、αk∈[0,1]表示反向散射标签s、k处的分裂系数;处的分裂系数;分别表示反向散射标签s与智能反射表面之间、反向散射标签s与接收机之间、射频源与反向散射标签s之间的信道系数矩阵。
[0075]
步骤205:射频源能量效率定义为遍历可达速率与发射功率之比,即总数据速率与总能量消耗之比,具体的射频源的能量效率的表达式为:
[0076][0077]
其中,为射频源的发射功率。
[0078]
步骤206:根据本发明一个实施例的车载智能反射表面辅助反向散射通信系统,以
接收机接收来自每个反向散射标签的标签信号的信干噪比要求为约束,以使射频源能量效率最大化为目标,建立以下射频源能量效率最大化模型,以确定车载智能反射表面的部署位置以及其中反射单元的相移:
[0079][0080][0081][0082][0083][0084][0085]
其中,η
l
表示车载智能反射表面的位置为l时,射频源的能量效率,γ
k,l,th
表示车载智能反射表面的位置为l时,接收机接收来自反向散射标签k的标签信号的信干噪比的下限。
[0086]
步骤207:由射频源发送给所有反向散射标签的载频信号在射频源处的线性预编码向量w可以通过如下的最小化预编码向量的平方范数的模型求得:
[0087][0088][0089][0090]
步骤208:简化模型(m1),改写为:
[0091][0092][0093][0094][0095]
其中其中由于此处约束中的和 tr(wh
k,1
(θ))都仅与θ中的平方项有关,根据即其结果均为1,而无关其θn的具体值。故而该sdp问题模型,可以使用cvx工具箱求解,获得最优解w
sdr
,根据分解w
sdr
后即可得到最优的线性预编码向量w
sdr
,在后续求解中简记为w。
[0096]
步骤209:在求解出w以后,射频源能量效率最大化模型的目标函数仅与θ相关问题,故而可以对相移θ的优化采用可行性问题的形式,可以将射频源能量效率最大化模型
改写为:
[0097]
(s1):findθ
[0098][0099][0100][0101]
θ在中关于θ的四次函数使这个问题高度非凸。
[0102]
步骤210:使用最小化最大化mm算法来获得可行性θ,将上述问题转化为一个更易于处理的近似问题,在每次迭代中用一个更简单的最小化约束来近似每个四次约束。使用v和来表达中的平方级表达式,可展开如下:
[0103][0104]
其中其中
[0105]
寻找如下的下界函数替代
[0106][0107]
其中是f(x)和下界函数之间的交点,是梯度算子,l是lipschitz常数 (即f(x)的最大曲率)。
[0108]
将带入f(x)后可得不等式右侧的下界函数为那么可以将原约束改写为:
[0109][0110]
其中i是尺寸可变的单位矩阵,v0即原约束和下界函数之
间的交点,也即每次迭代选取的下界函数的参考点,
[0111]
此外,问题(s1)中的另一个约束,即电路约束同样可以改写为:
[0112][0113]
其中,
[0114]
通过这些变换,得到了中的一个可行性问题,其中且秩为1。然后,可以通过放松秩约束将问题转化为sdp。通过进一步将目标转化为显式优化形式,可以获得更有利的解。
[0115]
步骤211:引入松弛变量{δk}表示电路约束的可实现值与其要求值ξk之间的差异,这样可确保满足信干噪比约束的同时,优先考虑具有δk项的更具有限制性的电路约束,并获得问题如下:
[0116][0117]
步骤212:如图3所示,对每一位置l求解问题(s1)、(s2),即可得到任意位置处的最优相移和最大能量效率,进一步根据最大的能量效率得到全路段车载智能反射面的最优部署位置。具体求解方法如下所示:
[0118]
s1.初始化预编码向量w
(i+1)
,标签分裂系数α(i),组合向量gi,其中i为外迭代数,初始化为1;选择作为起点,其中j内迭代数,初始化为1;并初始化车载智能反射表面的当前位置l=0,全路段最大能量效率η
max
=0,车载智能反射表面最佳部署位置l
*
=0;
[0119]
s2.获取每个标签的tk和uk;
[0120]
s3.使用cvx工具箱求解问题(s2),获得的最佳值
[0121]
s4.对进行特征值分解,即其中λ是矩阵的特征向量组成的矩阵,d是一个对角矩阵,其对角线上的元素即是特征值;
[0122]
s5.初始化循环序数q=1,根据randa随机搜索技术,生成向量
[0123]
s6.计算根据删除向量的最后一个元素得到
[0124]
s7.重复s5到s6,循环次数由一随机数ρ指定,若q≤ρ继续循环,每循环一次q增加1,若q>ρ,则结束循环,记录每一个
[0125]
s8.将使不等式约束左边超过右边最多的作为下一次迭代的起始向量其中
[0126]
s9.重复s2到s8,直至收敛,j为迭代序数,每迭代一次j增加1,获得当前位置l的最优相移和最大的能量效率
[0127]
s10.若则l
*
←
l;
[0128]
s11.更新车辆当前位置l=l+length。若l≤l
max
,则返回s2;若l>l
max
,算法结束;length表征车身长度;
[0129]
s12.输出每一个位置的最优相移矩阵和最大的能量效率进一步得到车载智能反射表面在其移动范围内的最优部署位置l
*
和对应的最大能量效率η
max
。
[0130]
综上,本发明考虑了智能反射表面的移动性和部署位置对系统性能的影响,通过所提出的波束赋形方法,在信干噪比约束下最大化能量效率,提升通信系统性能。
[0131]
应当指出,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也在本技术权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1