基于多邻居状态转换的点云几何编解码方法及装置
本发明属于点云压缩编码,具体涉及一种基于多邻居状态转换的点云几何编解码方法及装置。
背景技术:
1、在点云g-pcc(geometry-based point cloud compression,基于几何的点云压缩编码)编码器框架中,点云的几何信息和属性信息是分开进行编码的。目前g-pcc的几何编解码可分为基于八叉树的几何编解码和基于预测树的几何编解码。
2、在基于八叉树的几何编码框架中,首先对几何信息进行坐标转换,使点云全都包含在一个bounding box(包围盒)中,然后再进行体素化处理,接着按照广度优先遍历的顺序不断对bounding box进行树划分,对划分产生的子节点,以一位bit来表示该节点在空间中对应的长方体块是否包含点,称为占位码。将包围盒依次划分得到子节点,对非空的(包含点云中的点)的子节点继续进行划分,直到划分得到的叶子节点为1x1x1的单位立方体时停止划分,最后对每个节点的占位码进行编码,同时对叶子节点中所包含的点数进行编码,以完成几何八叉树的编码,生成二进制码流。
3、在现有的八叉树编码框架中,对于占位码的编码,通常根据待编码符号(即待编码子节点的占位码)的状态信息确定具体的编码规则。这其中涉及到两个问题,一是待编码符号状态的生成,二是待编码符号状态与具体编码规则之间的对应关系。
4、对于第一个问题,在现有的八叉树编码中,主要采用以下五部分信息生成待编码符号的状态:一是待编码子节点位于当前节点的位置信息;二是当前节点的六个共面邻居节点的占据情况,也即六近邻状态;三是待编码子节点的已编码兄弟节点占据情况;四是待编码子节点的帧内预测状态;五是已编码的邻居子节点的占位情况。一般而言,进行八叉树划分的节点,会产生8个子节点,其索引值为0~7。在进行待编码符号的状态表征时,选用上述任一种情况下的信息进行状态表示。考虑子节点的索引不同、帧内预测状态以及邻居子节点状态,则对于任意子节点来说,其状态总数为10872个。
5、然而,上述方法仍存在不足之处。例如,六近邻状态和兄弟状态中,不同的子节点的取值范围差异过大;又如,在邻居子节点状态中,没有考虑到邻居子节点对不同子节点的影响,这使得选取的邻居节点与待编码子节点的相关性不高,从而影响待编码符号的状态表征,进而影响了编码效果。
6、对于第二个问题,公开号为us20210167795a1的专利文献提供了一种编码器映射方法,其将待编码子节点的占位码(也即待编码符号)的一系列离散状态映射到数量较少的二进制编码器集合中,并且在每次占位码编码完成之后,更新映射关系,从而实现占位码状态到不同编码器的映射。
7、然而,上述方法需要对输入的每个状态都进行编码器映射并且更新映射关系,计算过程较为复杂,且占用内存较多。例如,对于10872个状态,每个状态都要存储一个8bit的值用于记录其映射的二进制编码索引,则耗费内存为10872×8=86976bits,这使得算法开销较大,硬件实现难度较高。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于多邻居状态转换的点云几何编解码方法及装置。本发明要解决的技术问题通过以下技术方案实现:
2、第一方面,本发明提供了一种基于多邻居状态转换的点云几何编码方法,包括:
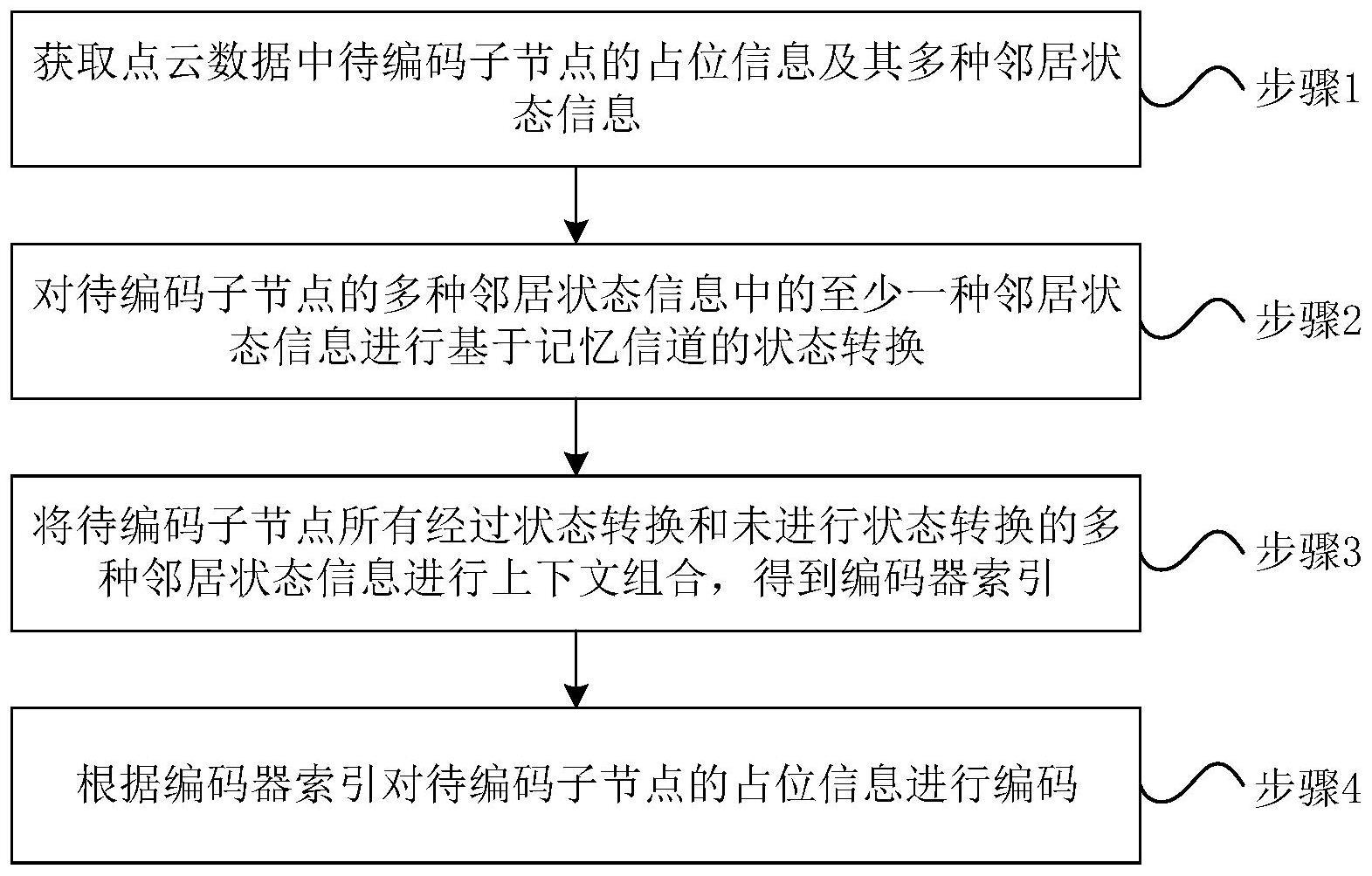
3、获取点云数据中待编码子节点的占位信息及其多种邻居状态信息;
4、对所述待编码子节点的多种邻居状态信息中的至少一种邻居状态信息进行基于记忆信道的状态转换;
5、将所述待编码子节点所有经过状态转换和未进行状态转换的多种邻居状态信息进行上下文组合,得到编码器索引;
6、根据所述编码器索引对所述待编码子节点的占位信息进行编码。
7、第二方面,本发明提供了一种基于多邻居状态转换的点云几何编码装置,包括:
8、第一数据获取模块,用于获取点云数据中待编码子节点的占位信息及其多种邻居状态信息;
9、第一状态转换模块,用于对所述待编码子节点的多种邻居状态信息中的至少一种邻居状态信息进行基于记忆信道的状态转换;
10、第一信息组合模块,用于将所述待编码子节点所有经过状态转换和未进行状态转换的多种邻居状态信息进行上下文组合,得到编码器索引;
11、编码模块,用于根据所述编码器索引对所述待编码子节点的占位信息进行编码。
12、第三方面,本发明提供了一种基于多邻居状态转换的点云几何解码方法,包括:
13、获取待解码子节点的码流及其多种邻居状态信息;
14、对所述待解码子节点的多种邻居状态信息中的至少一种邻居状态信息进行基于记忆信道的状态转换;
15、将所述待解码子节点所有经过状态转换和未进行状态转换的多种邻居状态信息进行上下文组合,得到解码器索引;
16、根据所述解码器索引对所述待解码子节点的码流进行解码。
17、第四方面,本发明提供了一种基于多邻居状态转换的点云几何解码装置,包括:
18、第二数据获取模块,用于获取待解码子节点的码流及其多种邻居状态信息;
19、第二状态转换模块,用于对所述待解码子节点的多种邻居状态信息中的至少一种邻居状态信息进行基于记忆信道的状态转换;
20、第二信息组合模块,用于将所述待解码子节点所有经过状态转换和未进行状态转换的多种邻居状态信息进行上下文组合,得到解码器索引;
21、解码模块,用于根据所述解码器索引对所述待解码子节点的码流进行解码。
22、本发明的有益效果:
23、本发明提供的基于多邻居状态转换的点云几何编解码方法一方面通过使用相关性更强的多种邻居状态信息,使得状态值的表征效果更好,进而提升了编码效果;另一方面通过对邻居状态进行基于记忆信道的状态转换,将具有占用内存较多的状态转换为另一种占用内存较少的状态,并将所有邻居状态转换进行上下文信息组合,以生成了待编码符号的状态,计算过程较为简单,大大降低了算法的内存消耗,进而降低了码率,提高了编码效率。
24、以下将结合附图及实施例对本发明做进一步详细说明。
技术特征:
1.一种基于多邻居状态转换的点云几何编码方法,其特征在于,包括:
2.根据权利要求1所述的基于多邻居状态转换的点云几何编码方法,其特征在于,所述待编码子节点的多种邻居状态信息至少包括第一邻居信息和第二邻居信息;其中,
3.根据权利要求2所述的基于多邻居状态转换的点云几何编码方法,其特征在于,所述第一邻居信息至少包括第一状态、第二状态以及第三状态中的一种;其中,
4.根据权利要求2所述的基于多邻居状态转换的点云几何编码方法,其特征在于,所述第二邻居信息至少包括第四状态和第五状态中的一种;其中,
5.根据权利要求1所述的基于多邻居状态转换的点云几何编码方法,其特征在于,对所述待编码子节点的多种邻居状态信息中的至少一种邻居状态信息进行基于记忆信道的状态转换,包括:
6.一种基于多邻居状态转换的点云几何编码装置,其特征在于,包括:
7.一种基于多邻居状态转换的点云几何解码方法,其特征在于,包括:
8.根据权利要求7所述的基于多邻居状态转换的点云几何解码方法,其特征在于,所述待解码子节点的多种邻居状态信息至少包括第三邻居信息和第四邻居信息;其中,
9.根据权利要求8所述的基于多邻居状态转换的点云几何解码方法,其特征在于,所述第三邻居信息至少包括第六状态、第七状态以及第八状态中的一种;其中,
10.根据权利要求8所述的基于多邻居状态转换的点云几何解码方法,其特征在于,所述第四邻居信息至少包括第九状态和第十状态中的一种;其中,
11.根据权利要求7所述的基于多邻居状态转换的点云几何解码方法,其特征在于,对所述待解码子节点的多种邻居状态信息中的至少一种邻居状态信息进行基于记忆信道的状态转换,包括:
12.一种基于多邻居状态转换的点云几何解码装置,其特征在于,包括:
技术总结
本发明公开了一种基于多邻居状态转换的点云几何编解码方法及装置,其中,编码方法包括:获取点云数据中待编码子节点的占位信息及其多种邻居状态信息;对待编码子节点的多种邻居状态信息中的至少一种邻居状态信息进行基于记忆信道的状态转换;将待编码子节点所有经过状态转换和未进行状态转换的多种邻居状态信息进行上下文组合,得到编码器索引;根据编码器索引对待编码子节点的占位信息进行编码。本发明通过使用相关性更强的多种邻居状态信息,并对其中的部分邻居状态信息进行基于记忆信道的状态转换,一方面提升了状态值的表征效果,降低了码率,提升了编码效果,另一方面大大降低了算法的内存消耗。
技术研发人员:杨付正,张伟,田腾亚
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!