一种多视角环绕拍摄空间一致性的修正方法与流程
本发明涉及图像处理,具体涉及一种多视角环绕拍摄的修正方法。
背景技术:
1、在多视角环绕拍摄过程中,多个摄像机机位的空间一致性处理是其中的核心技术,摄像机拍摄视角没有矫正一致,会在最终的视频效果中产生抖动现象,现有技术在拍摄前的搭建阶段,需要安放矫正杆,抽取每个机位的静止画面,根据矫正杆在每个摄像机画面中的位置,来计算和获取每个机位的摄像机相对参考机位的位置和姿态偏差,以便在后续的拍摄中,对每个摄像机画面进行实时的修正和处理。
2、然而,随着拍摄的进行,初期获取的矫正文件参数,随着时间的延续,由于摄像机云台基础的震动、人为触碰、配重不稳等等原因,产生变化。使得矫正文件参数已经不适合当前的空间一致性要求,由于直播等原因,现场环境往往不允许重新竖立矫正杆,重新制作矫正文件,这就导致渲染后的效果视频仍会产生抖动,因此只能舍弃异常的机位,牺牲画面质量,来确保直播的正常进行。
技术实现思路
1、本发明的目的在于,提供一种多视角环绕拍摄空间一致性的修正方法,解决以上技术问题;
2、一种多视角环绕拍摄空间一致性的修正方法,包括,
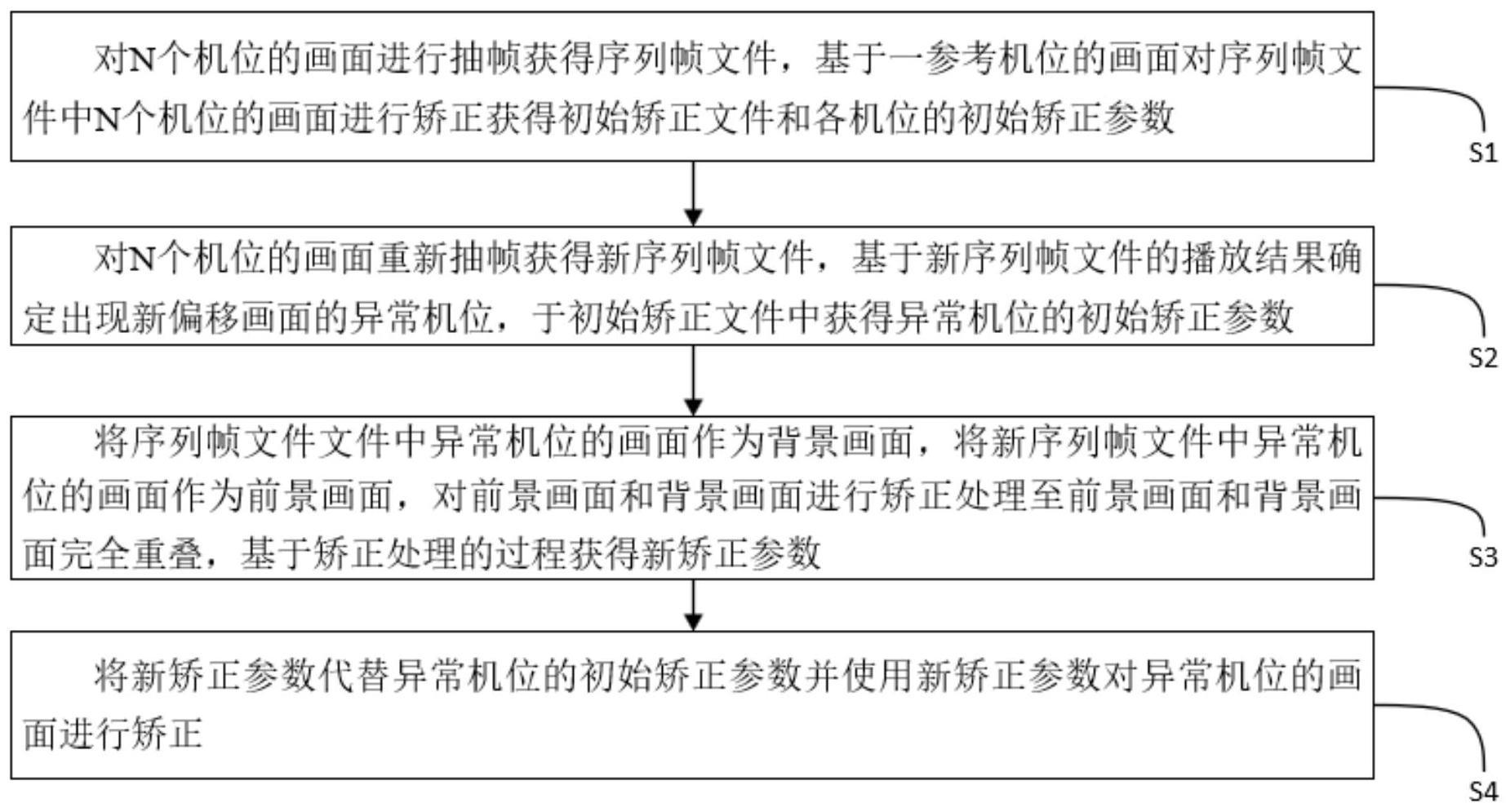
3、步骤s1,对n个机位的画面进行抽帧获得序列帧文件,基于一参考机位的画面对所述序列帧文件中n个所述机位的画面进行矫正获得初始矫正文件和各所述机位的初始矫正参数;
4、步骤s2,对n个所述机位的画面重新抽帧获得新序列帧文件,基于所述新序列帧文件的播放结果确定出现新偏移画面的异常机位,于所述初始矫正文件中获得所述异常机位的初始矫正参数;
5、步骤s3,将所述序列帧文件文件中所述异常机位的画面作为背景画面,将所述新序列帧文件中所述异常机位的画面作为前景画面,对所述前景画面和所述背景画面进行矫正处理至所述前景画面和所述背景画面完全重叠,基于矫正处理的过程获得新矫正参数;
6、步骤s4,将所述新矫正参数代替所述异常机位的所述初始矫正参数并使用所述新矫正参数对所述异常机位的画面进行矫正。
7、优选的,所述步骤s3包括,
8、步骤s31,建立一虚拟机位,将所述背景画面和前景画面导入至所述虚拟机位;
9、步骤s32,于所述背景画面上标记出第一标记点a(x1,y1)和第二标记点b(x2,y2),于所述前景画面上标记出第三标记点c(x3,y3)和第四标记点d(x4,y4);
10、步骤s33,通过一仿射变换矩阵对所述前景画面进行缩放、旋转、平移的矫正运算使所述第一标记点a(x1,y1)和所述第三标记点c(x3,y3)重合以及使所述第二标记点b(x2,y2)和所述第四标记点d(x4,y4)重合。
11、优选的,所述第一标记点a(x1,y1)和所述第三标记点c(x3,y3)位于所述背景画面的和所述前景画面的相同位置;所述第二标记点b(x2,y2)和所述第四标记点d(x4,y4)位于所述背景画面的和所述前景画面的相同位置。
12、优选的,将步骤s33中矫正运算过程中计算出的缩放参数、旋转参数、平移参数作为所述新矫正参数。
13、优选的,所述缩放参数的计算公式为,
14、
15、其中s为所述缩放参数,s0为所述原始矫正参数中的原始缩放参数,δs为缩放参数增量,a3为经所述缩放参数修正后的所述第三标记点c(x3,y3)和所述第四标记点d(x4,y4)之间连线的线段长度,a1为所述第一标记点a(x1,y1)和所述第二标记点b(x2,y2)之间连线的线段长度。
16、优选的,对所述前景画面缩放时多次增加所述缩放参数增量,并于每次增加所述缩放参数增量后判断a3是否等于a1,若相等则将当前缩放比例作为所述缩放参数,否则继续增加所述缩放参数增量直至a3和a1相等为止,缩放参数增量的计算公式为:
17、
18、其中a2为所述第三标记点c(x3,y3)和所述第四标记点d(x4,y4)之间连线的线段长度,a1为所述第一标记点a(x1,y1)和所述第二标记点b(x2,y2)之间连线的线段长度,l为缩放允许的精度误差比。
19、优选的,所述旋转参数的计算公式为,
20、θ=θ0+ω
21、其中θ为所述旋转参数,θ0为所述原始矫正参数中的原始旋转参数,ω为所述第一标记点a(x1,y1)和所述第二标记点b(x2,y2)之间连线的线段ab与所述第三标记点c(x3,y3)和所述第四标记点d(x4,y4)之间连线的线段cd之间的夹角。
22、优选的,所述线段ab和所述线段cd之间的夹角的计算公式为:
23、
24、优选的,所述平移参数包括沿x轴的平移参数c1和沿y轴的平移参数c2,所述沿x轴的平移参数c1的计算公式为,
25、c1=cx+δdi
26、其中cx为所述仿射变换矩阵中锚点坐标的横坐标,δdi为第i次迭代时的距离增量,沿x轴平移时,通过迭代方式使所述第三标记点c(x3,y3)和所述第四标记点d(x4,y4)每次在x轴方向上接近所述第一标记点a(x1,y1)和所述第二标记点b(x2,y2)一半的距离,经迭代后将所述第三标记点c(x3,y3)和所述第四标记点d(x4,y4)通过所述仿射变换矩阵,调节所述仿射变换矩阵中所述锚点坐标的位置,若经仿射变换后的所述第三标记点c(x3,y3)和所述第四标记点d(x4,y4)的坐标与所述第一标记点a(x1,y1)和所述第二标记点b(x2,y2)的坐标相等,将此时计算获得的c1作为所述平移参数中沿x轴的平移参数;
27、相对应的计算出所述平移参数中沿y轴的平移参数。
28、优选的,第i次迭代时的距离增量δdi的表达式为,
29、
30、本发明的有益效果:由于采用以上技术方案,本发明无需竖立矫正杆,通过画面比对和算法验证的方法获得新的矫正参数,从而达到视频渲染的要求。
技术特征:
1.一种多视角环绕拍摄空间一致性的修正方法,其特征在于,包括,
2.根据权利要求1所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,所述步骤s3包括,
3.根据权利要求2所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,所述第一标记点a(x1,y1)和所述第三标记点c(x3,y3)位于所述背景画面的和所述前景画面的相同位置;所述第二标记点b(x2,y2)和所述第四标记点d(x4,y4)位于所述背景画面的和所述前景画面的相同位置。
4.根据权利要求2所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,将步骤s33中矫正运算过程中计算出的缩放参数、旋转参数、平移参数作为所述新矫正参数。
5.根据权利要求4所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,所述缩放参数的计算公式为,
6.根据权利要求5所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,对所述前景画面缩放时多次增加所述缩放参数增量,并于每次增加所述缩放参数增量后判断a3是否等于a1,若相等则将当前缩放比例作为所述缩放参数,否则继续增加所述缩放参数增量直至a3和a1相等为止,缩放参数增量的计算公式为:
7.根据权利要求4所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,所述旋转参数的计算公式为,
8.根据权利要求7所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,所述线段ab和所述线段cd之间的夹角的计算公式为:
9.根据权利要求4所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,所述平移参数包括沿x轴的平移参数c1和沿y轴的平移参数c2,所述沿x轴的平移参数c1的计算公式为,
10.根据权利要求9所述的多视角环绕拍摄空间一致性的修正方法,其特征在于,第i次迭代时的距离增量δdi的表达式为,
技术总结
本发明涉及图像处理技术领域,具体涉及一种多视角环绕拍摄空间一致性的修正方法,包括,步骤S1,对N个机位的画面进行抽帧获得序列帧文件,并计算获得初始矫正文件和各机位的初始矫正参数;步骤S2,对N个机位的画面重新抽帧获得新序列帧文件,于初始矫正文件中获得异常机位的初始矫正参数;步骤S3,前景画面和背景画面进行矫正处理至前景画面和背景画面完全重叠,基于矫正处理的过程获得新矫正参数;步骤S4,将新矫正参数代替异常机位的初始矫正参数并使用新矫正参数对异常机位的画面进行矫正,本发明无需竖立矫正杆,通过画面比对和算法验证的方法获得新的矫正参数,从而达到视频渲染的要求。
技术研发人员:谈新
受保护的技术使用者:上海东方传媒技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!