故障主重性判定方法、装置、设备及存储介质与流程
本发明涉及互联网通信,尤其涉及一种故障主重性判定方法、装置、设备及存储介质。
背景技术:
1、随着微服务架构系统的不断流行和普及,很多大型企业和数据中心等大型单位都对其应用系统进行了微服务架构的改造。微服务架构给应用系统的运行稳定性和功能健壮性带来便利的同时,也给系统运维定位故障根因带来了极大的挑战。
2、目前,基于人工智能算法对微服务架构下的故障根因定位的方法,虽然具有自动计算、快速发现和即时通知的特点,但是故障之间的多种关联性,包括时间上的相关性和拓扑结构上的相关性等,给根因定位带来了大量噪声,加大了故障根因定位的难度,降低了故障根因定位结果的准确性。
技术实现思路
1、本发明提供了一种故障主重性判定方法、装置、设备及存储介质,以降低多种故障并发带来的噪音,降低故障根因定位的难度,提高故障根因定位结果的准确性。
2、根据本发明的一方面,提供了一种故障主重性判定方法,包括:
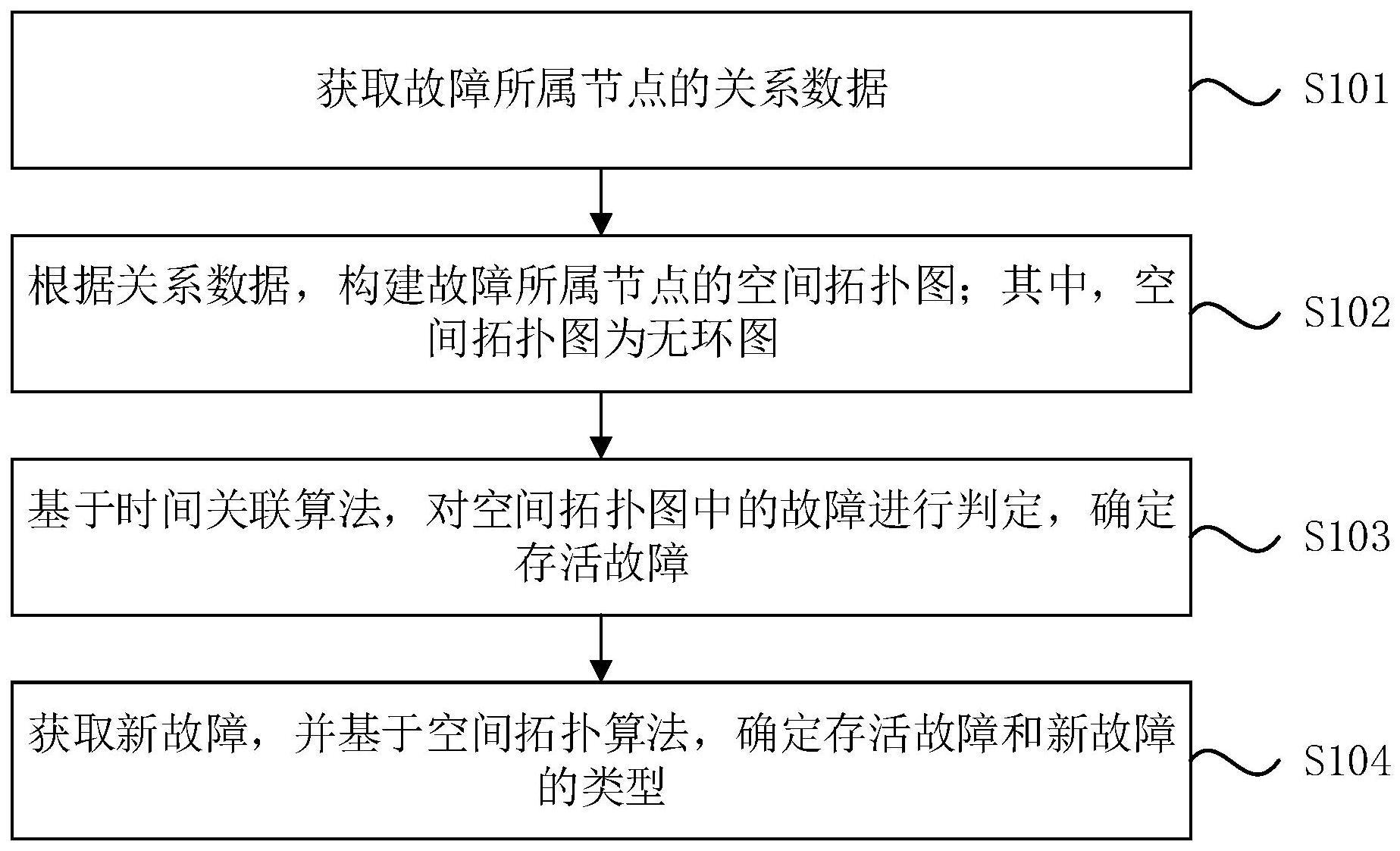
3、获取故障所属节点的关系数据;
4、根据关系数据,构建故障所属节点的空间拓扑图;其中,空间拓扑图为无环图;
5、基于时间关联算法,对空间拓扑图中的故障进行判定,确定存活故障;
6、获取新故障,并基于空间拓扑算法,确定存活故障和新故障的类型。
7、根据本发明的另一方面,提供了一种故障主重性判定装置,包括:
8、关系数据获取模块,用于获取故障所属节点的关系数据;
9、空间拓扑图构建模块,用于根据关系数据,构建故障所属节点的空间拓扑图;其中,空间拓扑图为无环图;
10、存活故障确定模块,用于基于时间关联算法,对空间拓扑图中的故障进行判定,确定存活故障;
11、故障类型确定模块,用于获取新故障,并基于空间拓扑算法,确定存活故障和新故障的类型。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与至少一个处理器通信连接的存储器;其中,
15、存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器能够执行本发明任一实施例的故障主重性判定方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,计算机指令用于使处理器执行时实现本发明任一实施例的故障主重性判定方法。
17、本发明实施例的技术方案,通过获取故障所属节点的关系数据;根据关系数据,构建故障所属节点的空间拓扑图;其中,空间拓扑图为无环图;基于时间关联算法,对空间拓扑图中的故障进行判定,确定存活故障;获取新故障,并基于空间拓扑算法,确定存活故障和新故障的类型。上述技术方案,利用获取的故障所属节点的关系数据构建空间拓扑图,并基于时间关联算法,确定空间拓扑图中的存活故障,减少了后续故障根因定位过程中故障的数量;同时,基于空间拓扑算法对新故障和存活故障的类型进行确定,进一步减少了故障根因定位过程中故障的数量,仅对主要故障进行分析,降低了多种故障并发带来的噪音,降低了故障根因定位的难度,提高了故障根因定位结果的准确性。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种故障主重性判定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于时间关联算法,对所述空间拓扑图中的故障进行判定,确定存活故障,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于时间关联算法,对所述空间拓扑图中的故障进行判定,确定存活故障,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于时间关联算法,对所述空间拓扑图中的故障进行判定,确定存活故障,包括:
5.根据权利要求1所述的方法,其特征在于,所述获取新故障,并基于空间拓扑算法,确定所述存活故障和所述新故障的类型,包括:
6.根据权利要求1所述的方法,其特征在于,所述获取新故障,并基于空间拓扑算法,确定所述存活故障和所述新故障的类型,包括:
7.根据权利要求1所述的方法,其特征在于,所述获取新故障,并基于空间拓扑算法,确定所述存活故障和所述新故障的类型,包括:
8.一种故障主重性判定装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的故障主重性判定方法。
技术总结
本发明公开了一种故障主重性判定方法、装置、设备及存储介质,所述方法包括:获取故障所属节点的关系数据;根据关系数据,构建故障所属节点的空间拓扑图;其中,空间拓扑图为无环图;基于时间关联算法,对空间拓扑图中的故障进行判定,确定存活故障;获取新故障,并基于空间拓扑算法,确定存活故障和新故障的类型。本发明实施例基于时间关联算法,确定空间拓扑图中的存活故障,减少了后续故障根因定位过程中故障的数量;同时,基于空间拓扑算法对新故障和存活故障的类型进行确定,进一步减少了故障根因定位过程中故障的数量,仅对主要故障进行分析,降低了多种故障并发带来的噪音,降低了故障根因定位的难度,提高了故障根因定位结果的准确性。
技术研发人员:程捷
受保护的技术使用者:北京博睿宏远数据科技股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!