感知时延的测试方法、装置、计算机设备和存储介质与流程
本申请涉及计算机,特别是涉及一种感知时延的测试方法、装置、计算机设备和存储介质。
背景技术:
1、在感知技术领域,感知处理过程需要一定的响应时间,因此基于感知数据感知到目标对象的时刻往往会晚于目标对象实际出现的时刻,两者之间的时间差即为感知所造成的感知时延。
2、感知时延直接影响感知的时效性,特别是在自动驾驶领域,车端实际行驶的道路场景复杂多变,若不能及时感知外界环境的变化,则会严重影响自动驾驶本身的安全性。
3、然而,传统技术中仅是对感知时延进行粗略的估计,所得到的感知时延的准确性较差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种感知时延的测试方法、装置、计算机设备和存储介质。
2、第一方面,本申请提供了一种感知时延的测试方法包括:
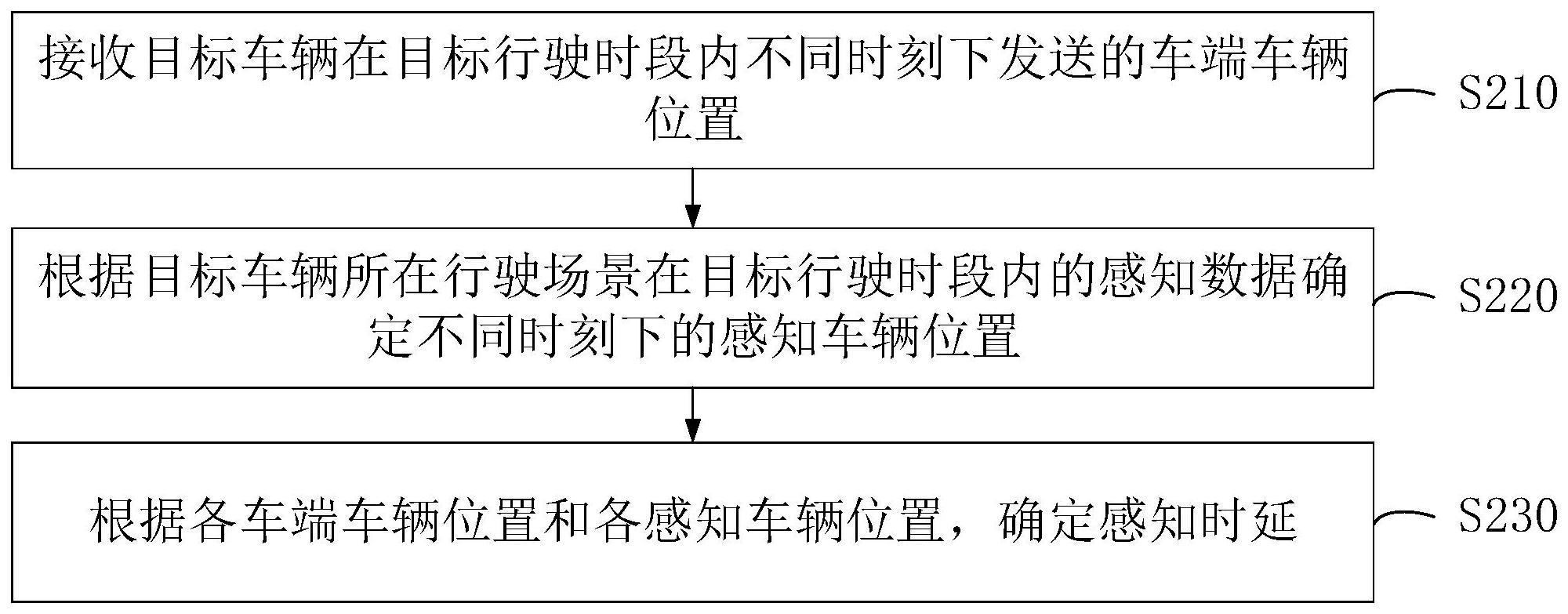
3、接收目标车辆在目标行驶时段内不同时刻下发送的车端车辆位置;
4、根据目标车辆所在行驶场景在目标行驶时段内的感知数据确定不同时刻下的感知车辆位置;
5、根据各车端车辆位置和各感知车辆位置,确定感知时延。
6、在其中一个实施例中,目标车辆单向曲线行驶,根据各车端车辆位置和各感知车辆位置,确定感知时延,包括:
7、根据各车端车辆位置确定车端拐点车辆位置;
8、根据各感知车辆位置确定感知拐点车辆位置;
9、根据车端拐点车辆位置和感知拐点车辆位置确定感知时延。
10、在其中一个实施例中,车端车辆位置为目标车辆的经纬度坐标;根据各车端车辆位置确定车端拐点车辆位置,包括:
11、根据预设的感知坐标系与经纬度坐标系之间的转换关系将各车端车辆位置转换至感知坐标系,得到对应的车端参考车辆位置;
12、根据各车端参考车辆位置拟合形成第一轨迹曲线;
13、获取第一轨迹曲线上极值点对应的车端参考车辆位置,作为车端拐点车辆位置。
14、在其中一个实施例中,感知车辆位置为感知坐标系下的坐标;根据各感知车辆位置确定感知拐点车辆位置,包括:
15、根据各感知车辆位置拟合形成第二轨迹曲线;
16、获取第二轨迹曲线上极值点对应的感知车辆位置,作为感知拐点车辆位置。
17、在其中一个实施例中,根据车端拐点车辆位置和感知拐点车辆位置确定感知时延,包括:
18、将车端拐点车辆位置和感知拐点车辆位置进行匹配,确定相匹配的车端拐点车辆位置和感知拐点车辆位置;
19、根据相匹配的车端拐点车辆位置和感知拐点车辆位置之间的时间戳差值,确定感知时延。
20、在其中一个实施例中,将车端拐点车辆位置和感知拐点车辆位置进行匹配,确定相匹配的车端拐点车辆位置和感知拐点车辆位置,包括:
21、获取车端拐点车辆位置和感知拐点车辆位置之间的距离;
22、若距离小于预设距离,则确定车端拐点车辆位置和感知拐点车辆位置为相匹配的车端拐点车辆位置和感知拐点车辆位置。
23、第二方面,本申请还提供了一种感知时延的测试装置,包括:
24、数据接收模块,用于接收目标车辆在目标行驶时段内不同时刻下发送的车端车辆位置;
25、感知定位模块,用于根据目标车辆所在行驶场景在目标行驶时段内的感知数据确定不同时刻下的感知车辆位置;
26、时延确定模块,用于根据各车端车辆位置和各感知车辆位置,确定感知时延。
27、第三方面,本申请还提供了一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述任一项感知时延的测试方法的步骤。
28、第四方面,本申请还提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述任一项感知时延的测试方法的步骤。
29、第五方面,本申请还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一项感知时延的测试方法的步骤。
30、上述感知时延的测试方法、装置、计算机设备、存储介质和程序产品中,通过接收目标车辆在目标行驶时段内不同时刻下发送的车端车辆位置,并根据目标车辆所在行驶场景在目标行驶时段内的感知数据确定不同时刻下的感知车辆位置,进而根据各车端车辆位置和各感知车辆位置,确定感知时延。通过上述方法即可测量得到路侧设备进行感知处理所造成的感知时延,提高了所确定的感知时延的准确性。
技术特征:
1.一种感知时延的测试方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述目标车辆单向曲线行驶,所述根据各所述车端车辆位置和各所述感知车辆位置,确定感知时延,包括:
3.根据权利要求2所述的方法,其特征在于,所述车端车辆位置为所述目标车辆的经纬度坐标;所述根据各所述车端车辆位置确定车端拐点车辆位置,包括:
4.根据权利要求3所述的方法,其特征在于,所述感知车辆位置为所述感知坐标系下的坐标;所述根据各所述感知车辆位置确定感知拐点车辆位置,包括:
5.根据权利要求2至4中任意一项所述的方法,其特征在于,所述根据所述车端拐点车辆位置和所述感知拐点车辆位置确定所述感知时延,包括:
6.根据权利要求5所述的方法,其特征在于,所述将所述车端拐点车辆位置和所述感知拐点车辆位置进行匹配,确定相匹配的车端拐点车辆位置和感知拐点车辆位置,包括:
7.一种感知时延的测试装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种感知时延的测试方法、装置、计算机设备和存储介质,所述方法包括:接收目标车辆在目标行驶时段内不同时刻下发送的车端车辆位置,并根据目标车辆所在行驶场景在目标行驶时段内的感知数据确定不同时刻下的感知车辆位置,进而根据各车端车辆位置和各感知车辆位置,确定感知时延。通过上述方法即可测量得到路侧设备进行感知处理所造成的感知时延,提高了所确定的感知时延的准确性。
技术研发人员:田洋,马冰,陈国民,王烨,许涵宇,王邓江
受保护的技术使用者:苏州万集车联网技术有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!