一种电力巡检机器人巡检系统及图像识别方法
本发明属于巡检设备数据采集分析,具体涉及一种电力巡检机器人巡检系统及图像识别方法。
背景技术:
1、随着巡检机器人的发展,在通信、变电站等领域中需要对机房、基站等场所进行巡检,从而及时发现设备隐患,成为当前维护设备安全运作不可或缺的手段。
2、目前,在智能机器人领域,巡检机器人执行巡检任务时,按照巡检路线运行到巡检目标位置,停下来后通过自带的拍摄单元拍摄目标物,然后继续向下一个巡检目标位置运动,运动过程中,机器人对之前拍摄的目标图片进行自动识别,读取并备份其中的表计数值、或开关位置信息。
3、目前图像识别技术和数据分析已经在电力行业中应用,如实现了对电能表图像中电能表型号、条码、表示数的智能识别,保证了表信息的准确,避免了业务处理过程中人为因素的参与。在变电巡检过程中,某些设备的运行参数也可通过图像识别技术自动读取,减少了手工录入可能造成的数据信息差错。但在电力机器人巡检过程中,产生的图片数据量巨大,图片信息复杂,图像识别的处理速度和识别效率有待提高。
4、现有的图像识别方法不能精确的对图像信息进行分类处理,只能处理单一问题,例如图表设备的运行参数读取,无法对设备外的异常信息进行分析,导致图像识别的处理速度慢,识别效率低。
技术实现思路
1、本发明的目的在于避免现有技术中的不足之处,提供一种电力巡检机器人巡检系统及图像识别方法,对采集图片的信息进行分类处理,可同时进行设备数据和异常状况数据分析,有效提高识别效率同时降低安全隐患。
2、为达到上述目的,本发明采用如下技术方案:
3、一种电力巡检机器人巡检系统,包含数据库,数据采集模块,设备数据识别模块,云存储模块和数据传输模块;
4、所述数据库用于针对大量不同设备和异常状况的图片和音频数据,获取不同设备的识别参数信息,建立不同设备的数据模型,配置相对应的数据识别接口;
5、所述数据采集模块用于电力巡检机器人进行巡检任务时,利用可见光图像采集系统,红外图像采集系统和音频采集系统得到图片和音频信息;
6、所述设备数据识别模块用于根据图片和音频信息,调用相应的图像和音频识别接口,结合当前巡检点数据库,返回图片和音频各标定区域的识别结果;
7、所述云存储模块用于存储检测得到的电力巡检机器人目标图像音频数据、图像特征数据集以及设备识别信息生成相关配置文件;
8、所述数据传输模块用于将巡检端上传的巡检结果信息作为历史巡检信息上传到后台。
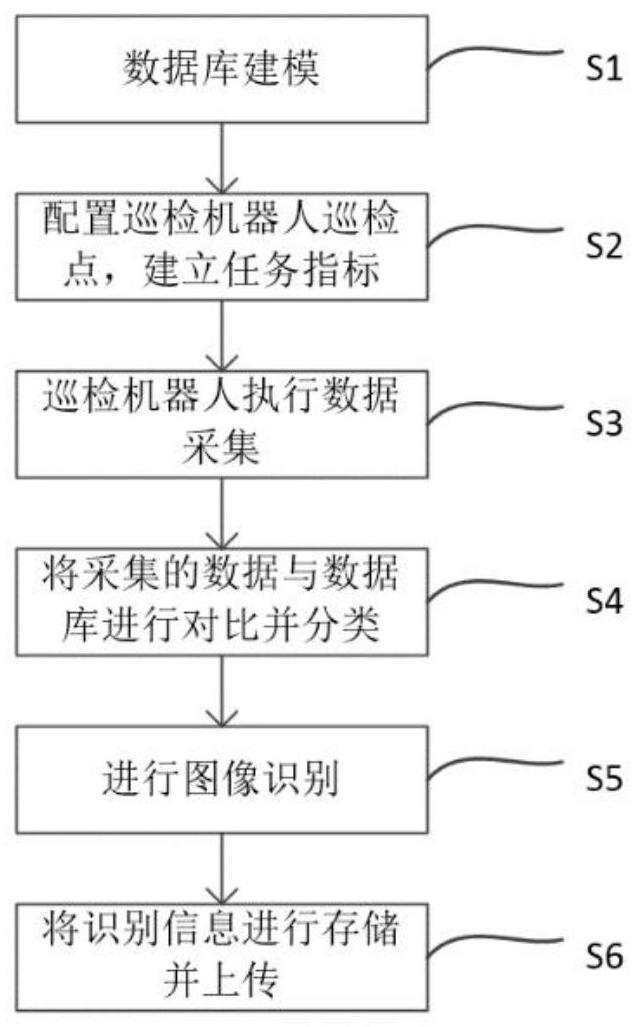
9、本发明还提供一种电力巡检机器人巡检系统的图像识别方法,包括以下步骤:
10、s1:电力巡检机器人数据库建模;
11、s2:配置巡检机器人巡检点,建立任务指标;
12、s3:巡检机器人执行数据采集;
13、s4:将采集的数据与数据库进行对比并分类;
14、s5:进行图像识别;
15、s6:实现识别信息存储并上传。
16、进一步地,所述s1中的数据库包含设备数据库和异常状况数据库;
17、所述设备数据库的建模过程包含获取大量不同设备的设备图片,获取不同设备的识别参数信息,建立不同设备的数据模型,配置图像识别接口;
18、所述异常状况数据库的建模过程包含获取大量包括异常火源,电火花,飞鸟在内的异常图像和常规检修人员人脸图像,以及包括指定仪器正常运行的电流声,震动声在内的常规音频,建立异常图像,人脸图像,常规音频的数据模型,配置数据识别接口。
19、进一步地,所述s2包括:利用巡检机器人的避障导航系统扫描巡检空间,记录包括设备、垃圾桶、栏杆在内的所有固定障碍物,生成全域地图;
20、将全域地图划分成n个巡检点,基于全域地图,规划每个巡检点的巡检路径,并规划每个巡检点的执行任务。
21、进一步地,所述s3包括:巡检机器人数据采集系统包含可见光图像采集系统,红外图像采集系统和音频采集系统;当巡检机器人运行到指定巡检点,通过可见光图像采集系统和红外图像采集系统进行拍照得到图片,通过音频采集系统进行收集音频信息。
22、进一步地,所述s4包括:将采集的图像数据进行设备识别,一张图片包括多个设备,对不同设备进行图片切割,调用图像识别接口,进入不同的设备数据识别模块;然后进行异常状况异常图像对比,检测出异常图像则报警,若没有则跳过;再进行异常状况人脸图像对比,检测出非常规人脸图像则报警,若检测出的是数据库内的人脸则跳过;
23、将采集的音频信息与异常状况数据库内的常规音频进行比对,若吻合则跳过,若不吻合则报警。
24、进一步地,所述s5中,设备数据库和设备数据识别模块包含指针式仪表,数字式仪表,刀闸,开关闭合器,可随时增加数据;
25、使用深度神经网络算法和加速稳健特征算法对指针式仪表进行识别获取指针的读数;使用数字区域定位模型和目标检测模型对数字式仪表进行数字读取;使用工程配置标定和视觉识别算法识别刀闸状态。
26、进一步地,所述s6包括:将设备识别信息生成相关配置文件通过云存储模块和数据传输模块实现信息存储和上传,上传到后台供工作人员调用及处理。
27、有益效果:
28、本发明可以利用完整的数据分类系统和图像识别方法实现有效提高识别效率同时降低安全隐患。本发明的关键点在于采用一套巡检系统和图像识别技术实现电力巡检机器人对相关数据信息的处理,并建立完整的数据分类系统,可同时处理图表设备的运行参数读取和设备外的异常信息分析,图像识别的处理速度快,识别效率高,还能对多种异常状况进行报警,降低安全隐患。
技术特征:
1.一种电力巡检机器人巡检系统,其特征在于:包含数据库,数据采集模块,设备数据识别模块,云存储模块和数据传输模块;
2.根据权利要求1所述的一种电力巡检机器人巡检系统的图像识别方法,其特征在于,包括以下步骤:
3.根据权利要求2所述的图像识别方法,其特征在于,所述s1中的数据库包含设备数据库和异常状况数据库;
4.根据权利要求3所述的图像识别方法,其特征在于,所述s2包括:利用巡检机器人的避障导航系统扫描巡检空间,记录包括设备、垃圾桶、栏杆在内的所有固定障碍物,生成全域地图;
5.根据权利要求4所述的图像识别方法,其特征在于,所述s3包括:巡检机器人数据采集系统包含可见光图像采集系统,红外图像采集系统和音频采集系统;当巡检机器人运行到指定巡检点,通过可见光图像采集系统和红外图像采集系统进行拍照得到图片,通过音频采集系统进行收集音频信息。
6.根据权利要求5所述的图像识别方法,其特征在于,所述s4包括:将采集的图像数据进行设备识别,一张图片包括多个设备,对不同设备进行图片切割,调用图像识别接口,进入不同的设备数据识别模块;然后进行异常状况异常图像对比,检测出异常图像则报警,若没有则跳过;再进行异常状况人脸图像对比,检测出非常规人脸图像则报警,若检测出的是数据库内的人脸则跳过;
7.根据权利要求6所述的图像识别方法,其特征在于,所述s5中,设备数据库和设备数据识别模块包含指针式仪表,数字式仪表,刀闸,开关闭合器,可随时增加数据;
8.根据权利要求7所述的图像识别方法,其特征在于,所述s6包括:将设备识别信息生成相关配置文件通过云存储模块和数据传输模块实现信息存储和上传,上传到后台供工作人员调用及处理。
技术总结
本发明提供一种电力巡检机器人巡检系统及图像识别方法,包括以下步骤:S1:电力巡检机器人数据库建模;S2:配置巡检机器人巡检点,建立任务指标;S3:巡检机器人执行数据采集;S4:将采集的数据与数据库进行对比并分类;S5:进行图像识别;S6:实现识别信息存储和上传。本发明可以利用完整的数据分类系统和图像识别方法实现有效提高识别效率同时降低安全隐患。
技术研发人员:王群京,韩琪玥,许家紫,刘国华,李国丽,文彦
受保护的技术使用者:安徽大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!