一种自巡航人像抓拍AI监测系统的制作方法
本技术涉及一种自巡航人像抓拍ai监测系统,属于智能安防领域。
背景技术:
1、随着智慧交通技术和智能化安防技术的不断发展,微波传感器与摄像机已经成为市场主流的探测设备。其中微波传感器是利用微波技术对目标进行探测,通过探测到的信号可以实时检测目标的位置、速度等信息,并且设备在工作时,不易受到恶劣环境的影响,其具有较高的稳定性;球机(球型摄像机)则利用视频图像进行目标探测,其采集到的视频图像可以反映出目标对象的直观特征。微波传感器与球机联动检测,能够充分发挥雷达和球机各自的优势,实现更多的场景化应用。
2、cn202122147563公开的“一种海上浮标安全预警系统”,采用多个微波传感器构成单个方向上的阵列,通过微波传感器扇区编号、方位角度、距离和速度信息来驱动一个光学球机进行图片拍摄,能够实现有效准确的拍摄,但该装置微波传感器固定在单个方向安装,需要较远的通讯布线,无法实现立体的目标追踪,没考虑边缘和云端相结合的模式。
3、cn202210027297提供了“一种球机的标定方法、装置、设备及存储介质”通过雷达与球机的联动来实现对球机的精确控制,但其针对的是固定的标定点,而非运动目标的跟踪。
4、cn202111493527公开了“一种抓拍系统、方法、装置及设备”,意在通过雷达来辅助判定目标行为实现抓拍,但针对的是有固定参照系的场景而非运动的场景,方向单一。
5、cn202211047635公开了“基于球机联动的工地噪声定位、喊停智慧管控装置”,雷达模块用于获取监控区域移动物体,并生成移动物体坐标数据指导球机运动。
6、该领域的研究主要集中在微波传感器安装在固定位置,或者其他针对固定区域进行监控的情形,两者的联动无法高效的针对立体的环境。同时,目前的联动仅限于单个球机和微波传感器之间的联动,通常未考虑多个球机和微波传感器之间的响应联动。
技术实现思路
1、有鉴于此,本实用新型的目的是提出一种自巡航人像抓拍ai监测系统,意在解决立体空间的目标追踪识别,在结构上和计算架构上对球机监控系统进行改进,通过多个球机和微波传感器的相互联动,并利用边缘计算和并行计算的优势提高识别的效率。
2、为达到上述目的,本实用新型提供如下技术方案:
3、一种自巡航人像抓拍ai监测系统,由球机摄像机和云计算平台构成,所述的球机摄像机由机芯、云台和固定底座构成;所述的机芯利用旋转副安装在云台上,可在竖直方向上进行旋转运动;所述的云台利用旋转副安装在固定底座上,可在水平方向上进行旋转运动;其特征在于,所述的机芯包括由图像传感器、可变焦镜头、光圈、icr(integratedcoherent receiver)组成的成像系统以及球形外壳护罩;所述的球形外壳护罩上竖直方向上呈圆周阵列的安装了多个微波传感器1;所述的云台由水平、竖直两个方向的旋转机构和与之对应的驱动电路控制系统、防尘外壳构成,并在其防尘外壳的水平方向上呈圆周阵列的安装了多个微波传感器2;所述的固定底座为中空的带有散热片的盒子,中空盒中含有边缘计算装置构成的主控系统;所述的主控系统带有网络模块,且外接有电源,分别与成像系统、微波传感器1、驱动电路控制系统、和微波传感器2相连。
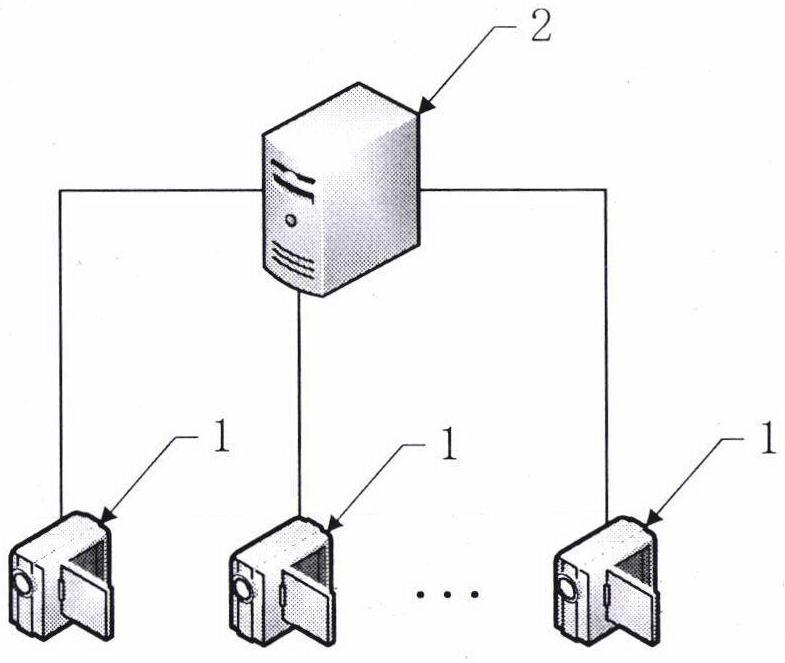
4、进一步,所述的球机摄像机数量可以大于等于1,采用网络与云计算平台相连,通过云计算平台实现对多个球机摄像机的联动控制。
5、进一步,所述的微波传感器1和微波传感器2可以为毫米波雷达、厘米波雷达或者激光雷达的一种或多种组合,根据具体的应用场景确定。
6、进一步,所述的微波传感器1和微波传感器2的数量大于等于2,可以根据具体应用场景的识别精度和成本进行确定。
7、进一步,所述的驱动电路控制系统为水平和竖直方向的两个含有pwm驱动控制器的电机驱动系统构成。
8、进一步,所述的主控系统由两个边缘计算装置串联构成;每个边缘计算装置具有独立的网络连接模块,与云计算平台相连,可通过云计算平台单独进行功能实现;其中,一个边缘计算装置与成像系统相连,内含深度学习卷积神经网络,如yolov5等ai算法,负责进行图像处理和识别,实现目标识别;另一个边缘计算装置与微波传感器1、驱动电路控制系统、和微波传感器2相连,采用如tracking-by-detection方式的ai算法,负责控制云台实现目标的追踪。
9、进一步,所述的边缘计算装置为带有内存和i/o接口的基于cpu或fpga且带有内存的微处理器。
10、进一步,所述的网络模块为蓝牙模块和无线网卡模块。可优选的,主控系统可以通过蓝牙模块与机芯和云台相连。
11、本实用新型的有益效果:本实用新型利用立体分布的相对于球机机芯位置固定的多个微波传感器实现对球机盲区运动目标的探测,进一步驱动球机对目标实现准确的追踪和识别;同时,由于相对机芯位置固定导致扇区精确,不受安装位置和环境的影响;边缘计算和云计算相结合的控制识别模式能够极大的发挥多球机的联动效率,以及单个球机图像识别和控制的效率。
技术特征:
1.一种自巡航人像抓拍ai监测系统,由球机摄像机(1)和云计算平台(2)构成,所述的球机摄像机(1)由机芯(11)、云台(12)和固定底座(13)构成;所述的机芯(11)利用旋转副安装在云台(12)上,可在竖直方向上进行旋转运动;所述的云台(12)利用旋转副安装在固定底座(13)上,可在水平方向上进行旋转运动;其特征在于,所述的机芯(11)包括由图像传感器、可变焦镜头、光圈、icr组成的成像系统(1101)以及球形外壳护罩(1102);所述的球形外壳护罩(1102)上竖直方向上呈圆周阵列的安装了多个微波传感器1(1103);所述的云台(12)由水平、竖直两个方向的旋转机构(1201)和与之对应的驱动电路控制系统(1202)、防尘外壳(1203)构成,并在其防尘外壳(1203)的水平方向上呈圆周阵列的安装了多个微波传感器2(1204);所述的固定底座(13)为中空的带有散热片(1301)的盒子,中空盒中含有边缘计算装置(1302)构成的主控系统(1303);所述的主控系统(1303)带有网络模块,且外接有电源,分别与成像系统(1101)、微波传感器1(1103)、驱动电路控制系统(1202)、和微波传感器2(1204)相连。
2.根据权利要求1所述的一种自巡航人像抓拍ai监测系统,其特征在于:所述的球机摄像机(1)数量可以大于等于1,采用网络与云计算平台(2)相连,通过云计算平台(2)实现对多个球机摄像机(1)的联动控制。
3.根据权利要求1所述的一种自巡航人像抓拍ai监测系统,其特征在于:所述的微波传感器1(1103)和微波传感器2(1204)可以为毫米波雷达、厘米波雷达或者激光雷达的一种或多种组合,根据具体的应用场景确定。
4.根据权利要求1所述的一种自巡航人像抓拍ai监测系统,其特征在于:所述的微波传感器1(1103)和微波传感器2(1204)的数量大于等于2,可以根据具体应用场景的识别精度和成本进行确定。
5.根据权利要求1所述的一种自巡航人像抓拍ai监测系统,其特征在于:所述的驱动电路控制系统(1202)为水平和竖直方向的两个含有pwm驱动控制器的电机驱动系统构成。
6.根据权利要求1所述的一种自巡航人像抓拍ai监测系统,其特征在于:所述的主控系统(1303)由两个边缘计算装置(1302)串联构成;每个边缘计算装置(1302)具有独立的网络连接模块,与云计算平台(2)相连,可通过云计算平台(2)单独进行功能实现;其中:一个边缘计算装置(1302)与成像系统(1101)相连,负责进行图像处理和识别,实现目标识别;另一个边缘计算装置(1302)与微波传感器1(1103)、驱动电路控制系统(1202)、和微波传感器2(1204)相连,负责控制云台实现目标的追踪。
技术总结
本技术公开了一种自巡航人像抓拍AI监测系统,属于智能安防领域。该系统由球机摄像机和云计算平台构成,所述的球机摄像机由机芯、云台和固定底座构成,分别在水平、竖直两个方向的分布安装多个微波传感器,利用立体分布的相对于球机机芯位置固定的多个微波传感器实现对球机盲区运动目标的探测,进一步驱动球机对目标实现准确的追踪和识别;同时,由于相对机芯位置固定导致扇区精确,不受安装位置和环境的影响;边缘计算和云计算相结合的控制识别模式能够极大的发挥多球机的联动效率,以及单个球机图像识别和控制的效率。
技术研发人员:李嘉旭,何川,涂文春,徐建华,陈松,罗家豪
受保护的技术使用者:李嘉旭
技术研发日:20221102
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!