一种3C行业视觉柔性的机器人的制作方法
本申请涉及机器视觉,特别涉及一种3c行业视觉柔性的机器人。
背景技术:
1、目前机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分cmos和ccd两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
2、相关技术中,一套完整的视觉检测系统主要包含图像采集部分和图像分析部分,而图像采集部分主要由工业相机、工业镜头以及机器视觉光源承担。在使用摄像装置进行拍摄的过程中,常需使用光源照亮加工件,使摄像装置在光亮足够的条件下拍摄得到清晰的加工件的影像以便通过算法计算获得加工件的三维图像,以便设备自行校准并进行加工。
3、但是,现有的光源通常相对加工件位置固定,光源光照角度固定,当加工件的曲面形状复杂时,光源不能变换位置以不同角度照射加工件,获取的影像单一且容易局部不清晰,导致通过摄像装置拍摄的影像计算获得加工件的三维图像准确度低,影响设备校准加工件和后续加工。
技术实现思路
1、本申请实施例提供一种3c行业视觉柔性的机器人,以解决相关技术中光源通常相对加工件位置固定,光源光照角度固定,当加工件的曲面形状复杂时,光源不能变换位置以不同角度照射加工件,获取的影像单一且容易不清晰,导致通过摄像装置拍摄的影像计算获得加工件的三维图像准确度低,影响设备校准加工件和后续加的问题。
2、本申请实施例提供了一种3c行业视觉柔性的机器人,包括:
3、工作台;
4、工件台,所述工作台上设置有工件台;
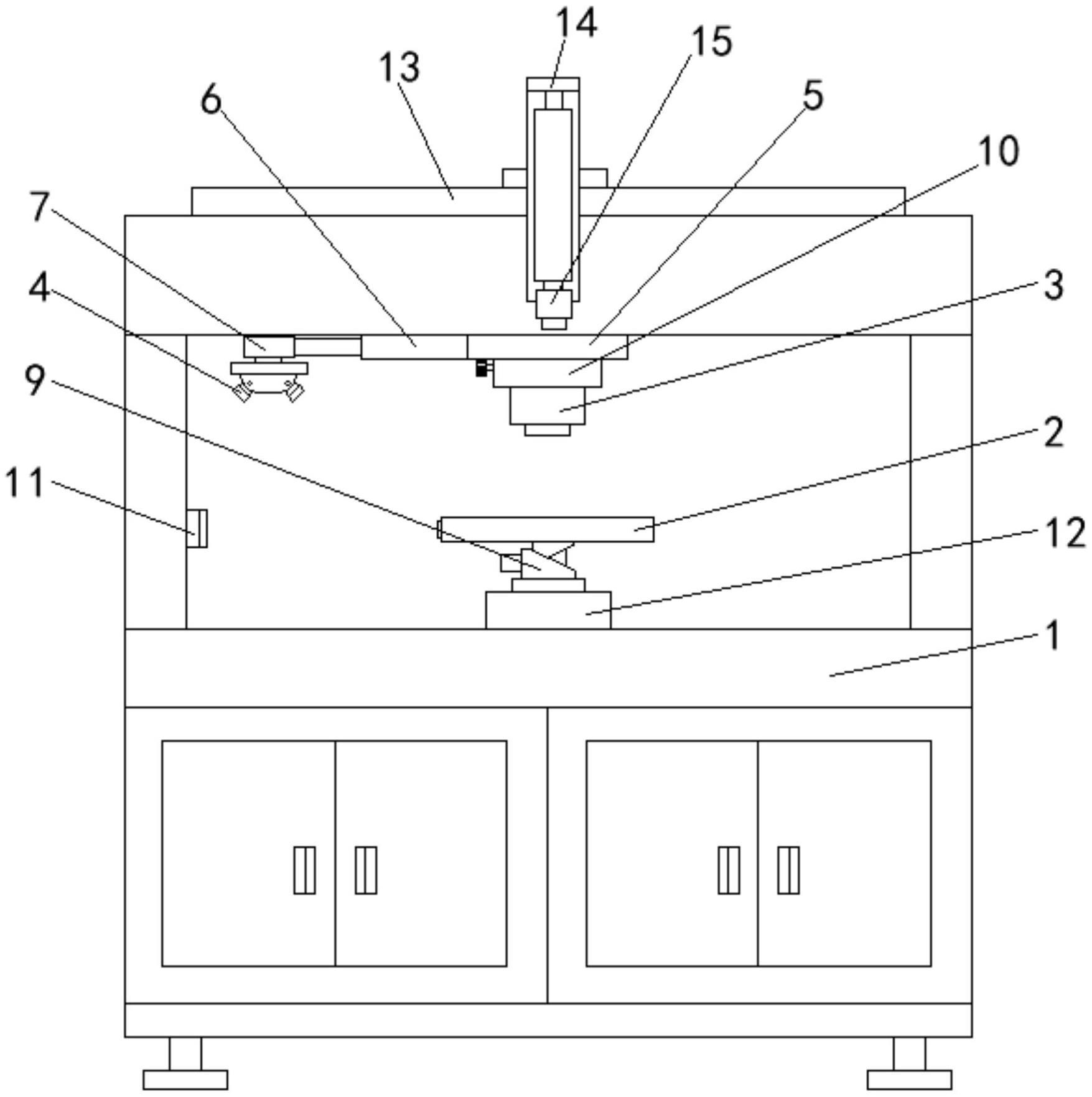
5、视觉系统,所述视觉系统包括位于工件台上方的摄像装置和避开摄像装置镜头前方的光源单元,所述摄像装置和光源单元之间设置有位移单元,所述位移单元用于带动光源单元沿工件台周向和径向移动并同时调节光源单元的照射角度以照明加工件。
6、一些实施例中,所述摄像装置通过连接座固定在工件台上方,所述连接座上同轴设置有第一旋转台,所述第一旋转台上设置有伸缩件,所述伸缩件远离第一旋转台的一端设置有角度调节组件,所述光源单元设置在角度调节组件上。
7、一些实施例中,所述角度调节组件包括与伸缩件远离第一旋转台的一端连接的第二旋转台,所述第二旋转台上设置有两个摆动座,所述光源单元设置在摆动座上。
8、一些实施例中,所述光源单元包括条形光源和线性光源,所述条形光源和线性光源分别设置在两个摆动座上。
9、一些实施例中,所述第一旋转台包括与连接座同轴转动连接环形齿轮以及设置在连接座上的第一电机,所述第一电机的输出端设置有带动环形齿轮转动的主动齿轮,所述伸缩件为电动缸。
10、一些实施例中,所述第二旋转台包括与伸缩件连接的第二电机以及与电机输出端连接的u形板,所述摆动座包括设置在u形板内侧的第三电机,所述第三电机的输出端连接有摆动块,所述光源单元设置在摆动块上。
11、一些实施例中,所述工作台上设置有用于带动工件台水平移动的纵向直线位移机构,所述纵向直线位移机构上设置有摆动台,所述工件台设置在所述摆动台上。
12、一些实施例中,所述摆动台包括连接在纵向直线位移机构移动端的固定座以及位于固定座一侧的活动座,所述固定座上设置有用于带动活动座俯仰运动的第四电机,所述活动座上设置有用于带动工件台转动的第五电机。
13、一些实施例中,所述工作台上设置有用于检测工件台位置的传感器。
14、一些实施例中,所述工作台上设置有位于工件台上方的水平移动的横向直线位移机构,所述横向直线位移机构的移动端设置有竖向直线位移机构,所述竖向直线位移机构的移动端设置有用于加工曲面零件的激光器。
15、本申请提供的技术方案带来的有益效果包括:
16、本申请实施例提供了一种3c行业视觉柔性的机器人,由于视觉系统包括位于工件台上方的摄像装置和避开摄像装置镜头前方的光源单元,摄像装置和光源单元之间设置有位移单元,位移单元用于带动光源单元沿工件台周向和径向移动并同时调节光源单元的照射角度以照明加工件,因此,当工件台上固定的加工件曲面形状复杂时,可以方便的通过位移单元改变光源单元对加工件的照射角度,配合摄像装置获取不同光照角度下的影像,使得通过摄像装置拍摄得的影像汇总计算后获得加工件的三维图像准确度高,一定程度上弥补影像局部不清晰的问题,保证设备校准加工件和后续加工的精确度。
技术特征:
1.一种3c行业视觉柔性的机器人,其特征在于,包括:
2.如权利要求1所述的一种3c行业视觉柔性的机器人,其特征在于:
3.如权利要求2所述的一种3c行业视觉柔性的机器人,其特征在于:
4.如权利要求3所述的一种3c行业视觉柔性的机器人,其特征在于:
5.如权利要求2至4任一项所述的一种3c行业视觉柔性的机器人,其特征在于:
6.如权利要求3至4任一项所述的一种3c行业视觉柔性的机器人,其特征在于:
7.如权利要求1所述的一种3c行业视觉柔性的机器人,其特征在于:
8.如权利要求7所述的一种3c行业视觉柔性的机器人,其特征在于:
9.如权利要求1所述的一种3c行业视觉柔性的机器人,其特征在于:
10.如权利要求1所述的一种3c行业视觉柔性的机器人,其特征在于:
技术总结
本申请涉及一种3C行业视觉柔性的机器人,属于机器视觉技术领域,该3C行业视觉柔性的机器人包括工作台;工件台,所述工作台上设置有工件台;视觉系统。由于视觉系统包括位于工件台上方的摄像装置和避开摄像装置镜头前方的光源单元,摄像装置和光源单元之间设置有位移单元,位移单元用于带动光源单元沿工件台周向和径向移动并同时调节光源单元的照射角度以照明加工件,因此,可以方便的通过位移单元改变光源单元对加工件的照射角度,配合摄像装置获取不同光照角度下的影像,使得通过摄像装置拍摄得的影像汇总计算后获得加工件的三维图像准确度高,一定程度上弥补影像局部不清晰的问题,保证设备校准加工件和后续加工的精确度。
技术研发人员:刘力,王曦,袁志纯,张娟,马晓俊,朱勇,宋峰,彭文佳
受保护的技术使用者:湖北省轻工业科学研究设计院有限公司
技术研发日:20221226
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!