HDR混合方案内的图像位置相关模糊控制的制作方法
本文中描述的方面总体上涉及像素混合技术,并且具体地涉及基于图像内的像素位置和采集图像的相机的位置来调节对不同曝光的像素加权的像素混合技术。
背景技术:
1、自主交通工具(autonomous vehicle,av)和高级驾驶员辅助系统(advanceddriver-assistance system,adas)用于标识包括人员、标志和光源的道路上的所有对象,以保持乘客和周围道路用户以及道路基础设施的安全。出于此目的,一个或多个相机可以被安装在交通工具内部和/或外部。然而,目前针对av和adas使用的相机具有缺陷,因为作为对象相对于交通工具的相对速度的结果,相机通常无法捕获高质量的图像。
技术实现思路
技术特征:
1.一种交通工具,包括:
2.如权利要求1所述的交通工具,其中,所述第一积分时间小于所述第二积分时间,使得所述第一曝光值与比所述第二曝光值更短的曝光值相对应。
3.如权利要求2所述的交通工具,其中,所述像素阵列包括像素的中心部分、像素的左部分和像素的右部分,并且
4.如权利要求1所述的交通工具,其中,所述第一曝光权重和所述第二曝光权重进一步基于所述交通工具的速度来确定。
5.如权利要求1所述的交通工具,其中,所述第一曝光权重和所述第二曝光权重进一步基于所述交通工具的偏航来确定。
6.如权利要求1所述的交通工具,其中,所述第一曝光权重和所述第二曝光权重是根据预定的位置相关加权图、基于所述图像传感器的所述像素阵列内的每个相应的像素的位置来确定的,所述预定的位置相关加权图基于所述图像传感器在所述交通工具上的位置。
7.如权利要求6所述的交通工具,其中,所述图像传感器来自所述交通工具上的多个图像传感器之中,并且
技术总结
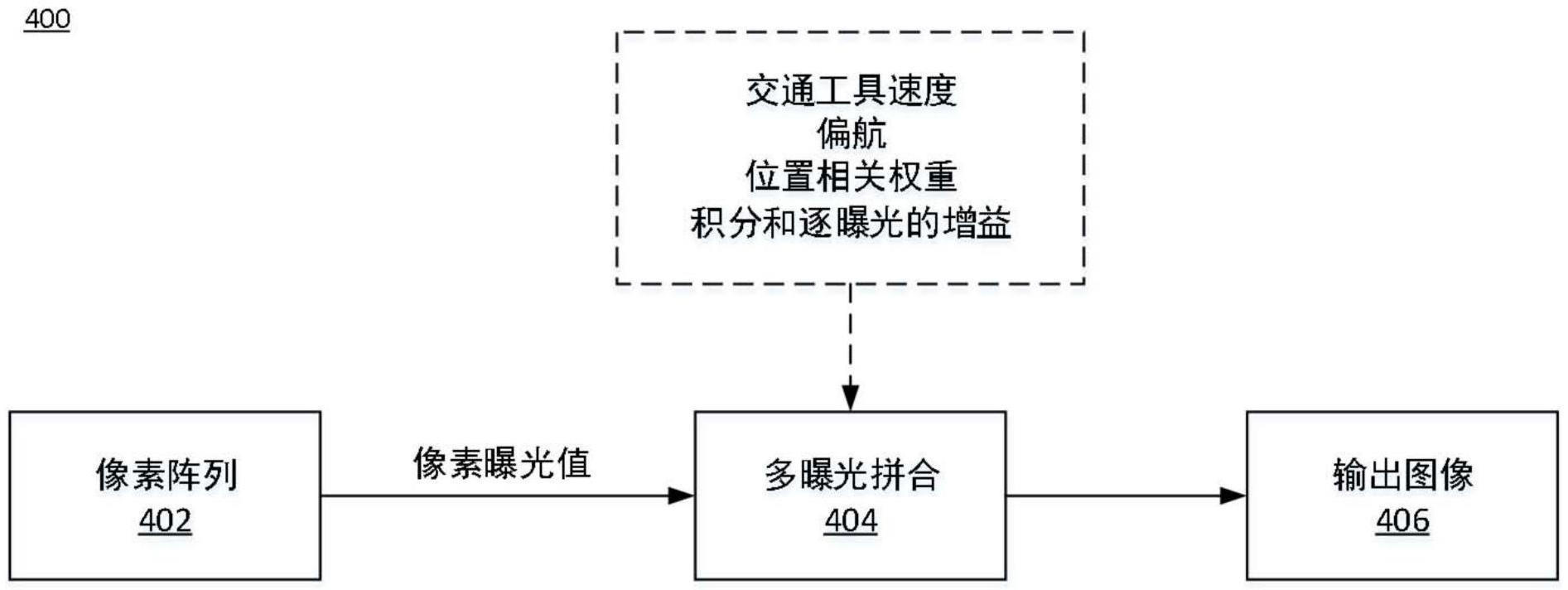
公开了用于改进对相对于交通工具相机具有不同相对角速度的对象的检测的技术。该技术用于对像素曝光值进行选择性地加权,以有利于像素阵列内的某些像素比其他像素有更长或更短的曝光时间。公开了一种选择性像素曝光加权系统,该系统用于基于像素阵列内的像素的位置以及诸如交通工具的移动和/或定向之类的其他因素而对在像素阵列内采集的像素的曝光值进行加权。该技术有利地使自主交通工具(AV)或高级驾驶员辅助系统(ADAS)能够更好地利用现有的相机并且消除运动模糊和其他伪像。
技术研发人员:G·鲍尔斯
受保护的技术使用者:移动眼视觉科技有限公司
技术研发日:
技术公布日:2024/1/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1