基于5G的多台采集站精确同步采集系统同步方法与流程
本发明涉及同步采集,尤其涉及基于5g的多台采集站精确同步采集系统同步方法。
背景技术:
1、在工业现场,对于重要的关键机械设备,往往配备在线监测基站,以便获得设备的运行状态,做好预测性维护,杜绝设备重大安全隐患或停产事故的发生。每台在线监测基站之间的数据采集同步能力是一个非常重要的指标。数据采集的同步关乎到时钟的同步。
2、时间同步是指在对比时刻求得标准时钟与本地时钟的频率和相位偏移,并通过修正使本地时钟与参考时钟保持同步。时间同步包括两个操作:授时和守时。授时是指通过不定期的对表,将本地时钟与参考时钟进行相位同步;守时也就是频率同步,它用来保证在两次对表的时间段内,本地时钟与参考时钟的偏差不能太大。
3、目前实现时钟同步的方式有很多,传统的同步方式有:卫星时钟同步、1588v2同步等。但现有技术方案要么额外成本高,要么布线麻烦。
技术实现思路
1、为解决上述问题,本发明提出了基于5g的多台采集站精确同步采集系统同步方法。
2、基于5g的多台采集站精确同步采集系统同步方法,包括链路延迟和时钟偏差测量过程和通过补偿算法同步主从时钟过程,所述链路延迟和时钟偏差测量过程通过测量硬件层的时间抖动并进行测试分析;所述补偿算法在进行偏移补偿前减小抖动影响,还包括基于kalman和pi控制器的渐进补偿算法。
3、进一步,所述链路延迟和时钟偏差测量过程包括以下步骤:
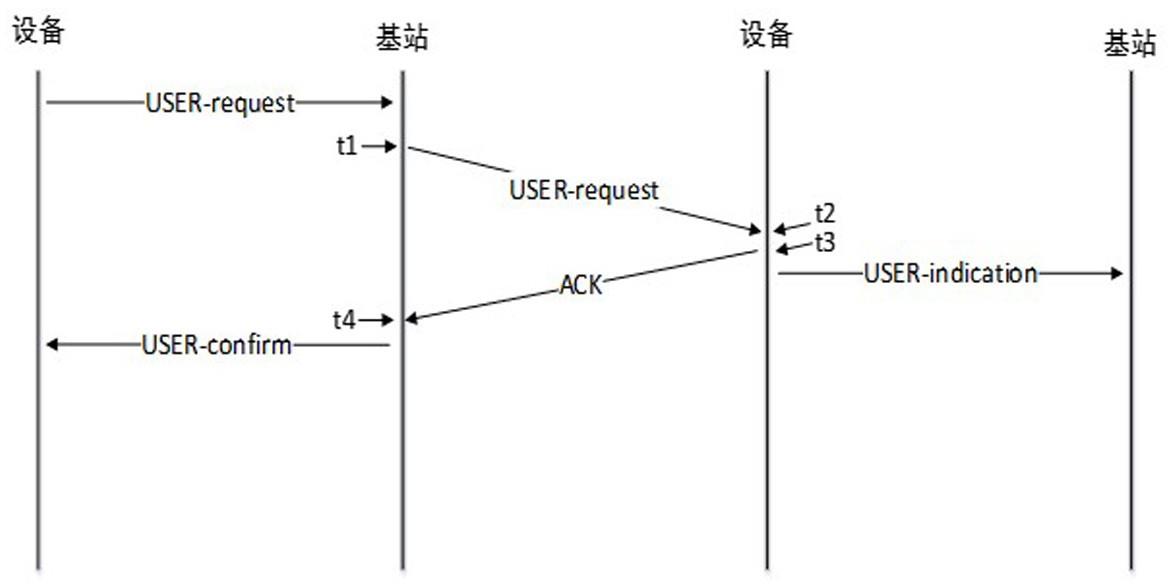
4、步骤a1:设备端发送request帧,基站核心网端收到request帧,发送一个ack控制帧给设备端,两个帧交互包括四个时间戳:发送request帧的时间t1,收到request帧的时间t2,发送ack控制帧的时间t3和收到ack控制帧的时间t4;
5、步骤a2:设备端初始化时间测量request帧,将前一次测量得到的t1和t4以及其他端到端同步信息传送给基站端;
6、步骤a3:报文交换完成时,设备端将收到的前一次t1和t4和上次记录的t2、t3构成一组进行处理;
7、步骤a4:设备端处理时间戳组,计算从时钟相对于主时钟的偏移和两节点间报文的平均传播时间。
8、进一步,所述步骤a2设备端初始化时间测量request帧时,每个request帧还包括一个用于标记本次测量过程的令牌和一个由设备端用来标记上一次测量的令牌。
9、进一步,所述步骤a4时间戳组处理计算从时钟相对于主时钟的偏移和两节点间报文的平均传播时间公式为:
10、tm2s=delaym2s+offset=t2-t1;
11、ts2m=delays2m-offset=t4-t3;
12、其中基站为主时钟端,设备为从时钟端,delaym2s表示从基站到设备的传输延时,而delays2m表示从设备到基站的传输延时,offset表示主从时钟偏差。
13、进一步,若设备和基站之间的传播路径对称,则平均链路延迟为:
14、
15、时钟相位偏移为:
16、
17、进一步,所述基于kalman和pi控制器的渐进补偿算法采用pi控制器和采用改进的抑制积分饱和的位置式控制算法同步主从时钟,算法公式为:
18、u(n)=kp·e(n)+in(n-1);
19、in(n)=in(n-1)+ki·e(n)+ksat·epi;
20、epi=us-u(n);
21、其中,当u(n)>>umax时,us=umax;当u(n)<<umin时,us=umin;否则us=u(n);us表示抑制积分饱和pi算法的输出,u(n)表示本次的pi调节器计算结果,kp表示比例调节系数,ki表示积分系数,ksat表示抗饱和系数,in(n)为本次积分累加和umax,umin分别表示pi调节器输出的最大值和最小值。
22、本发明的有益效果:本发明提出了基于5g的多台采集站精确同步采集系统同步方法,包括链路延迟和时钟偏差测量过程和通过补偿算法同步主从时钟过程,所述链路延迟和时钟偏差测量过程通过测量硬件层的时间抖动并进行测试分析;所述补偿算法在进行偏移补偿前减小抖动影响,还包括基于kalman和pi控制器的渐进补偿算法,通过本发明基于5g的多台采集站精确同步采集系统同步方法,在5g通信环境下通过软硬结合的方法,实现了采集站端的高精度的时间同步。
技术特征:
1.基于5g的多台采集站精确同步采集系统同步方法,其特征在于,包括链路延迟和时钟偏差测量过程和通过补偿算法同步主从时钟过程,所述链路延迟和时钟偏差测量过程通过测量硬件层的时间抖动并进行测试分析;所述补偿算法在进行偏移补偿前减小抖动影响,还包括基于kalman和pi控制器的渐进补偿算法。
2.根据权利要求1所述的基于5g的多台采集站精确同步采集系统同步方法,其特征在于,所述链路延迟和时钟偏差测量过程包括以下步骤:
3.根据权利要求2所述的基于5g的多台采集站精确同步采集系统同步方法,其特征在于,所述步骤a2设备端初始化时间测量request帧时,每个request帧还包括一个用于标记本次测量过程的令牌和一个由设备端用来标记上一次测量的令牌。
4.根据权利要求2所述的基于5g的多台采集站精确同步采集系统同步方法,其特征在于,所述步骤a4时间戳组处理计算从时钟相对于主时钟的偏移和两节点间报文的平均传播时间公式为:
5.根据权利要求1所述的基于5g的多台采集站精确同步采集系统同步方法,其特征在于,若设备和基站之间的传播路径对称,则平均链路延迟为:
6.根据权利要求1所述的基于5g的多台采集站精确同步采集系统同步方法,其特征在于,所述基于kalman和pi控制器的渐进补偿算法采用pi控制器和采用改进的抑制积分饱和的位置式控制算法同步主从时钟,算法公式为:
技术总结
本发明公开了基于5G的多台采集站精确同步采集系统同步方法,包括链路延迟和时钟偏差测量过程和通过补偿算法同步主从时钟过程,所述链路延迟和时钟偏差测量过程通过测量硬件层的时间抖动并进行测试分析;所述补偿算法在进行偏移补偿前减小抖动影响,还包括基于Kalman和PI控制器的渐进补偿算法,通过本发明基于5G的多台采集站精确同步采集系统同步方法,在5G通信环境下通过软硬结合的方法,实现了采集站端的高精度的时间同步。
技术研发人员:欧阳葆青,景世青,江开放
受保护的技术使用者:华润水泥投资有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!