一种基于LTE-V高精度定位的V2X设备空口测试方法与流程
本发明属于智能交通,具体涉及一种基于lte-v高精度定位的v2x设备空口测试方法。
背景技术:
1、智能路测rsu(road side unit)和智能车载obu(on-board unit)等v2x设备陆续出现,检验基于lte-v(long term evolution)通信的丢包率和时延方法成为突出问题,着重突出在v2x设备需要明确在一定通信丢包率情况下,有效的通信距离以及对应的时延。v2x空口通信,指的是设备之间利用lte-v通信技术进行信息交互过程。空口通信与相对距离、现场环境、传输字节数有较大关系。基于高精度定位的空口通信可更加准确测算出在不同环境、不同通信包大小下距离-丢包率、距离-时延之间的关系,为v2x设备提供更加准确的设计和调试方法。目前国内一些先导区进行大规模测试,主要测试单台设备对于大批量数据的处理能力,且测试环境较为理想,不利于在实际道路环境中测试。
技术实现思路
1、本发明的目的在于针对现有技术的不足之处,提供一种基于lte-v高精度定位的v2x设备空口测试方法,解决了v2x设备在不同环境下稳定性和实用性不高的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于lte-v高精度定位的v2x设备空口测试方法,包括如下步骤:
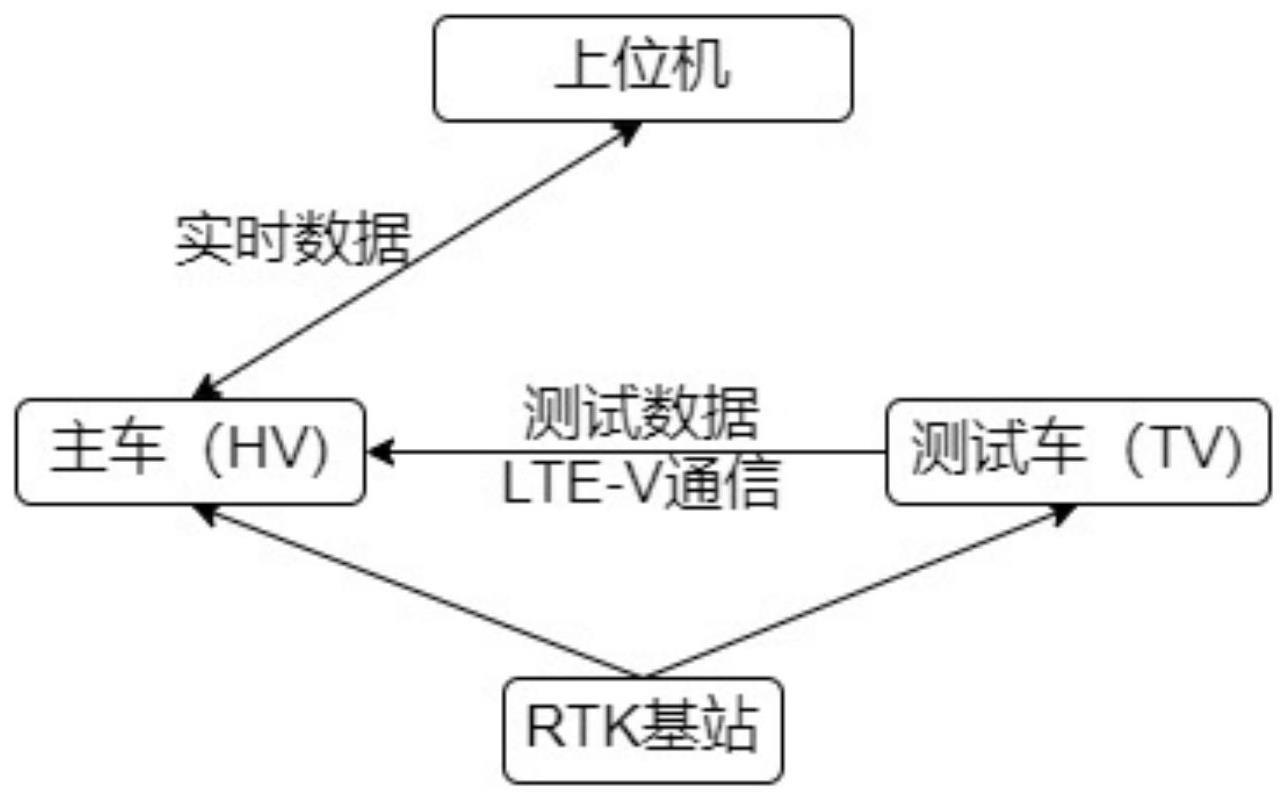
4、步骤1,主车和测试车搭载车用无线通信技术设备和实时动态高精度定位技术,主车和测试车同时接受来自卫星的gps信号,进行定位和授时;
5、步骤2,测试车实时按照10hz的频率发送自身位置信息、速度信息、发包时间戳、包序号数据;
6、步骤3,主车接收到测试车发送的实时数据,记录接收包时间戳,并实时计算发送包时间戳、瞬时时延、平均时延、相对距离、相对速度、丢包率、主车速度和测试车速度,按照与上位机通信格式组包上报至上位机;
7、步骤4,上位机实时解析数据包,并在上位机显示界面上显示原始报文、相对距离、主车速度、测试车速度、丢包率、瞬时时延、平均时延,并根据记录的相对距离、丢包率、瞬时时延生成距离-丢包率、距离-时延散点图。
8、进一步地,步骤1中,主车获取gps信号,主车进入厘米级定位状态,并获取实时位置、时间、速度和航向角信息。
9、进一步地,步骤1中高精度定位技术流程包括如下步骤:
10、步骤1.1,测试车定位模组接收卫星的原始gps数据并传输至gps处理模块;
11、步骤1.2,gps处理模块将原始gga数据通过4g或5g发送至rtk服务器,经过内部算法进行收敛后将带rtcm的gga数据通过公网返回给gps处理模块,且gps处理模块将数据回传至定位模组;
12、步骤1.3,持续收敛一段时间后,定位模组向gps处理模块输出高精度gga数据;
13、步骤1.4,gps模块按照协议解析处理后,向应用程序输出高精度定位信息。
14、进一步地,步骤4中,所述上位机通信硬件采用wifi或网线直连方式,通信协议采用udp通信。
15、进一步地,步骤4中上位机工作流程包括如下步骤:
16、步骤4.1,上位机根据测试设备与上位机通信协议,分别读取初始化心跳包和上报数据udp通信,心跳包同时读取测试设备id,并组包循环下发开始测试命令;
17、步骤4.2,上报数据进程收到开始测试命令后,解析上报数据并开启两个线程,一个线程用于本地文件i/o关键数据格式化存储,另一线程用于界面实时显示数据;
18、步骤4.3,测试结束后,根据本地记录的数据,生成距离-丢包率和距离-时延散点图。
19、与现有技术相比,本发明提供的一种基于lte-v高精度定位的v2x设备空口测试方法有益效果如下:
20、目前国内一些先导区进行大规模测试,主要测试单台设备对于大批量数据的处理能力,且测试环境较为理想,不利于在实际道路环境中测试。本发明提供了v2x设备在不同环境使用和调试以及产品性能改进的测试方法,从而大大增加企业研发v2x产品的稳定性和实用性。
技术特征:
1.一种基于lte-v高精度定位的v2x设备空口测试方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于lte-v高精度定位的v2x设备空口测试方法,其特征在于:步骤1中,主车获取gps信号,主车进入厘米级定位状态,并获取实时位置、时间、速度和航向角信息。
3.根据权利要求1所述的一种基于lte-v高精度定位的v2x设备空口测试方法,其特征在于:步骤1中高精度定位技术流程包括如下步骤:
4.根据权利要求1所述的一种基于lte-v高精度定位的v2x设备空口测试方法,其特征在于:步骤4中,所述上位机通信硬件采用wifi或网线直连方式,通信协议采用udp通信。
5.根据权利要求1所述的一种基于lte-v高精度定位的v2x设备空口测试方法,其特征在于:步骤4中上位机工作流程包括如下步骤:
技术总结
本发明属于智能交通技术领域,具体涉及一种基于LTE‑V高精度定位的V2X设备空口测试方法,包括如下步骤:步骤1,主车和测试车搭载车用无线通信技术设备和实时动态高精度定位技术,主车和测试车同时接受来自卫星的GPS信号,进行定位和授时;步骤2,测试车实时按照10HZ发送自身位置信息、速度信息、发包时间戳、包序号数据;步骤3,主车接收到测试车发送的实时数据,记录接收包时间戳,按照与上位机通信格式组包上报至上位机;步骤4,上位机实时解析数据包,并根据记录的相对距离、丢包率、瞬时时延生成距离‑丢包率、距离‑时延散点图,解决了V2X设备在不同环境下稳定性和实用性不高的问题。
技术研发人员:马伟,李觐,史立东
受保护的技术使用者:成都通广网联科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!