一种基于时间同步优化配置的智能驾驶平台的制作方法
本发明涉及智能驾驶,尤其是涉及一种基于时间同步优化配置的智能驾驶平台。
背景技术:
1、现有智能驾驶系统和车路协同项目上的ros中间件通讯需要首先经过主节点集中式网络,存在风险,压力测试会有宕机,缺少错误冗余;主节点宕机时,本机内参数和服务的不定时交互会存在风险;主节点宕机时,多机间交互时会影响到整个网络。
2、ros架构的socket通信方式在单路传感器的消息经多路传感器订阅时,多传感器应用场景的数据吞吐量4xn倍初始数据、加大通信延时,且4次拷贝增加cpu占有率。通讯功能直接导致控制器层和应用层的设计实现。
3、ros的数据结构和回调函数必须统一,需要全部匹配才能正确收发,进行消息的回调处理;部分算法或通信系统升级时,如果消息新增部分数据结构,需要对原消息的所有代码和已有数据进行批量转化才能匹配,并且每次收发增加两次拷贝,否则无法匹配;但调试时仍无法进行实际信息的展示。
技术实现思路
1、鉴于以上问题,本发明提供了一种基于时间同步优化配置的智能驾驶平台,不仅实现了分布式通讯,避免了依靠主节点进行服务和消息的交互,以此来提供系统安全升级和实现错误冗余,而且集成线上/线下的开发、标定、调试、测试和部署工具,实现已有数据、实车数据和传感器算法的交互与调度,实现产品化升级。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
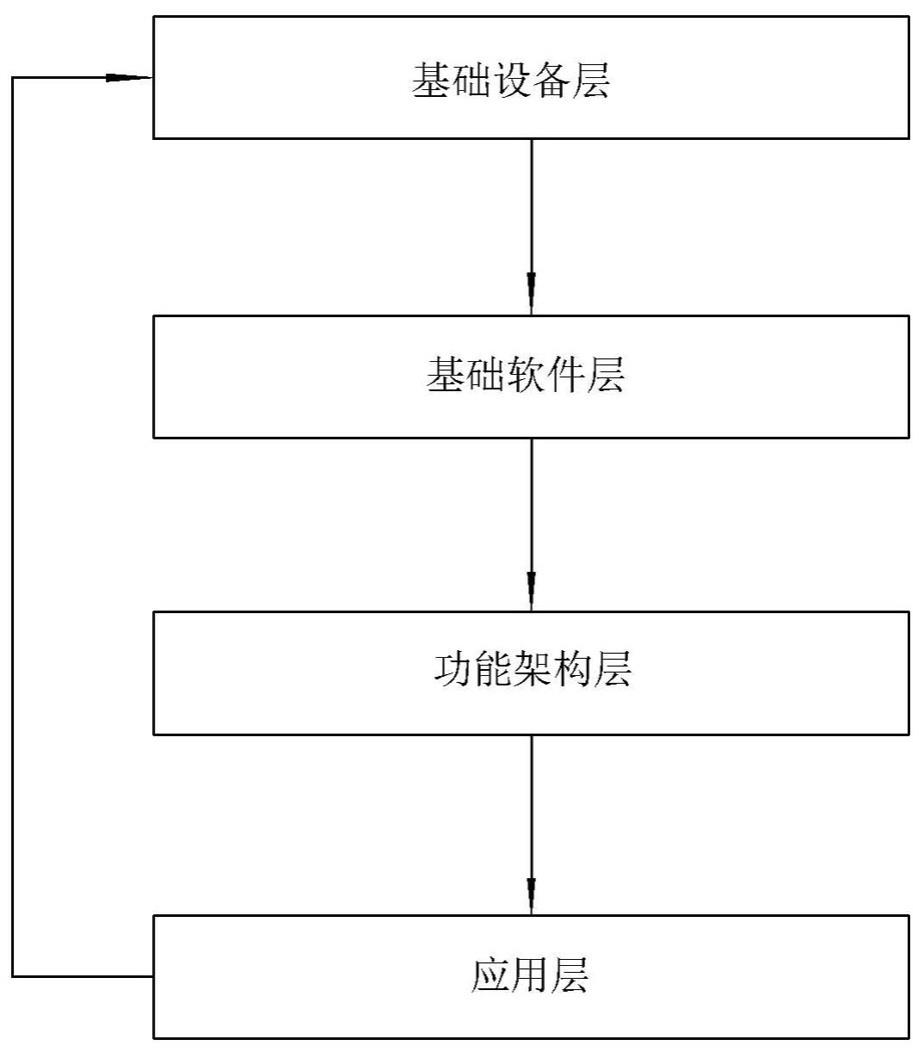
3、一种基于时间同步优化配置的智能驾驶平台,所述智能驾驶平台包括基础设备层、基础软件层、功能架构层和应用层,
4、所述基础设备层包括分布于目标区域的不同位置的m个智能驾驶车辆以及n个服务器终端,其中,m>n>1,m和n均为正整数;
5、所述基础设备层通过异步传输的方式与所述基础软件层通信,所述基础软件层包括dds模块、rmw模块、rcl模块和api接口模块,所述dds模块为所述智能驾驶平台提供基本的网络拓扑服务,所述rmw模块与所述dds模块连接,用于提供所述dds模块发布—订阅传输、服务配置,满足不同场景的通信需求,所述rcl模块封装ros cpp/ros py/other api,与所述rmw模块连接,为所述rmw模块提供名称管理、实时通信、lib初始化功能,所述api接口模块,用于为所述dds模块提供不同的数据接口;
6、所述功能架构层,与所述基础软件层连接,包括加速算子模块、感知算法处理模块、传感器抽象模块和时间同步管理模块,用于接收所述基础软件层的数据信息且进行同步优化配置处理;
7、所述智能驾驶平台通过所述应用层实现数据开发、数据标定、诊断调试、数据仿真、数据可视化、图形界面和部署工具。
8、进一步的,所述感知算法处理模块包括改进的adas算法单元、ncut算法单元和cnnseg算法单元,所述感知算法模块与所述加速算子模块连接。
9、进一步的,所述adas算法单元包括:
10、r1.获取车辆传感器数据信息,结合2d感知向3d感知渗透,输出车辆的3d数据信息;
11、r2.基于所述车辆的3d数据信息,根据高精度地图数据信息和车辆实时定位数据信息,输出车辆轨迹数据信息。
12、进一步的,根据所述改进的adas算法单元、所述ncut算法单元和所述cnnseg算法单元输出的不同数据帧,所述加速算子模块根据不同数据帧流进行加速处理。
13、进一步的,所述基础软件层的数据信息包括智能驾驶车辆的传感器数据信息和服务器终端的更新数据信息,所述服务器终端的更新数据信息包括系统升级数据信息和算法升级数据信息。
14、进一步的,根据所述基础软件层的数据信息,所述传感器抽象模块与所述时间同步管理模块连接,用于同步处理接收的数据信息,输出同步优化参数,并根据所述同步优化参数进行相应的优化配置。
15、进一步的,所述传感器抽象模块包括传感器数据预处理和数据矩阵信息,所述数据矩阵信息为将传感器数据信息通过矩阵变换转化为相应的图像数据矩阵信息、点云数据矩阵信息和车辆位置矩阵数据信息,所述传感器数据预处理为将传感器数据信息进行滤波和降噪处理。
16、进一步的,所述dds模块包括fastrtps单元、cyclonedds单元和otherdds单元。
17、进一步的,所述fastrtps单元包括rtpscommon子单元、rtpsdomain子单元和rtpsreader子单元。
18、进一步的,所述rtpscommon子单元用于创建、管理和销毁底层的rtpsparticipants,所述rtpsreader子单元包括rtps读者的配置参数。
19、本发明具有以下积极效果:
20、1.本发明采取基于soa的分布式架构,实现了分布式通讯,避免了依靠主节点进行服务和消息的交互,以此来提供系统安全升级和实现错误冗余。
21、2.本发明以dds/fastrtps为底座、结合共享内存的通讯调用方式,能够将系统传输带宽降低至之前ros架构的一半以下,降低了数据传输时延;采用共享内存共享指针方式代替tcp调度,降低cpu占用率30%以上,采取基于proto的数据结构,能够实现现有数据结构的向后兼容。
22、3.本发明通过嵌入的传感器执行器抽象层、感知算法处理模块、加速算子模块和时间同步管理模块的插件接口,极大提高了智能驾驶的开发效率,减少了后续开发的“造轮子”工作,实现产品化的特色定制服务。
23、4.本发明通过插件式的智能驾驶功能工具链模块,提供集成线上/线下的开发、标定、调试、测试和部署工具,实现已有数据、实车数据和传感器算法的交互与调度,实现产品化升级。
技术特征:
1.一种基于时间同步优化配置的智能驾驶平台,所述智能驾驶平台包括基础设备层、基础软件层、功能架构层和应用层,其特征在于:
2.根据权利要求1所述的基于时间同步优化配置的智能驾驶平台,其特征在于:所述感知算法处理模块包括改进的adas算法单元、ncut算法单元和cnnseg算法单元,所述感知算法模块与所述加速算子模块连接。
3.根据权利要求2所述的基于时间同步优化配置的智能驾驶平台,其特征在于,所述adas算法单元包括:
4.根据权利要求2所述的基于时间同步优化配置的智能驾驶平台,其特征在于:根据所述改进的adas算法单元、所述ncut算法单元和所述cnnseg算法单元输出的不同数据帧,所述加速算子模块根据不同数据帧流进行加速处理。
5.根据权利要求1所述的基于时间同步优化配置的智能驾驶平台,其特征在于:所述基础软件层的数据信息包括智能驾驶车辆的传感器数据信息和服务器终端的更新数据信息,所述服务器终端的更新数据信息包括系统升级数据信息和算法升级数据信息。
6.根据权利要求1所述的基于时间同步优化配置的智能驾驶平台,其特征在于:根据所述基础软件层的数据信息,所述传感器抽象模块与所述时间同步管理模块连接,用于同步处理接收的数据信息,输出同步优化参数,并根据所述同步优化参数进行相应的优化配置。
7.根据权利要求6所述的基于时间同步优化配置的智能驾驶平台,其特征在于:所述传感器抽象模块包括传感器数据预处理和数据矩阵信息,所述数据矩阵信息为将传感器数据信息通过矩阵变换转化为相应的图像数据矩阵信息、点云数据矩阵信息和车辆位置矩阵数据信息,所述传感器数据预处理为将传感器数据信息进行滤波和降噪处理。
8.根据权利要求1所述的基于时间同步优化配置的智能驾驶平台,其特征在于:所述dds模块包括fastrtps单元、cyclonedds单元和otherdds单元。
9.根据权利要求8所述的基于时间同步优化配置的智能驾驶平台,其特征在于:所述fastrtps单元包括rtpscommon子单元、rtpsdomain子单元和rtpsreader子单元。
10.根据权利要求9所述的基于时间同步优化配置的智能驾驶平台,其特征在于:所述rtpscommon子单元用于创建、管理和销毁底层的rtpsparticipants,所述rtpsreader子单元包括rtps读者的配置参数。
技术总结
本发明涉及一种基于时间同步优化配置的智能驾驶平台,所述智能驾驶平台包括基础设备层、基础软件层、功能架构层和应用层,所述基础设备层包括分布于目标区域的不同位置的m个智能驾驶车辆以及n个服务器终端,其中,m>n>1,m和n均为正整数;所述基础设备层通过异步传输的方式与所述基础软件层通信,所述基础软件层包括DDS模块、RMW模块、RCL模块和API接口模块。本发明不仅实现了分布式通讯,避免了依靠主节点进行服务和消息的交互,以此来提供系统安全升级和实现错误冗余,而且集成线上/线下的开发、标定、调试、测试和部署工具,实现已有数据、实车数据和传感器算法的交互与调度,实现产品化升级。
技术研发人员:王瑞泰,陆鑫,蔡营,李施,胡子辉
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!