移动设备的基站定位方法、移动设备以及存储介质与流程
本发明涉及清洁,尤其涉及一种移动设备的基站定位方法、移动设备以及存储介质。
背景技术:
1、移动设备,通常是指具有驱动行进功能的设备,可以是具有驱动模组的机器人,也可以是智能汽车。一些移动设备配置有基站,供移动设备进行停放,或者清洗。例如,设定移动设备是清洁设备,则清洁设备对地面进行清扫过程中,可以返回基站进行清洗,自清洁,或者清洁设备对地面清扫结果后,返回基站停放、充电等。
2、移动设备工作时,需要先构建地图,而构建地图时,要求记录基站所在的位置,以便于移动设备返回基站。在使用过程中,申请人发现,建图时记录的基站位置后,移动设备返回基站时,都是以该基站位置作为参考。然而在建完图后,移动设备执行任务过程中,基站可能会发生移动。而基站移动后,地图上记录的基站位置与基站的实际位置存在偏差,移动设备返回基站时,则无法找到基站,进而进站失败。或者无法找到基站时,需要花大量的时间不断的扫描环境,寻找基站,或者因无法找到基站而停止运动,进行报错,种种原因导致基站返回基站的效率不高。
技术实现思路
1、本发明的主要目的在于提供一种移动设备的基站定位方法、移动设备以及存储介质,旨在通过在移动设备建图完成后,在执行任务过程中,对基站的实际位置进行更新,使得移动设备能够准确高效的返回基站,避免进站失败影响移动设备的工作效率。
2、为了实现上述目的,本发明提供一种移动设备的基站定位方法,所述移动设备的基站定位方法包括以下步骤:
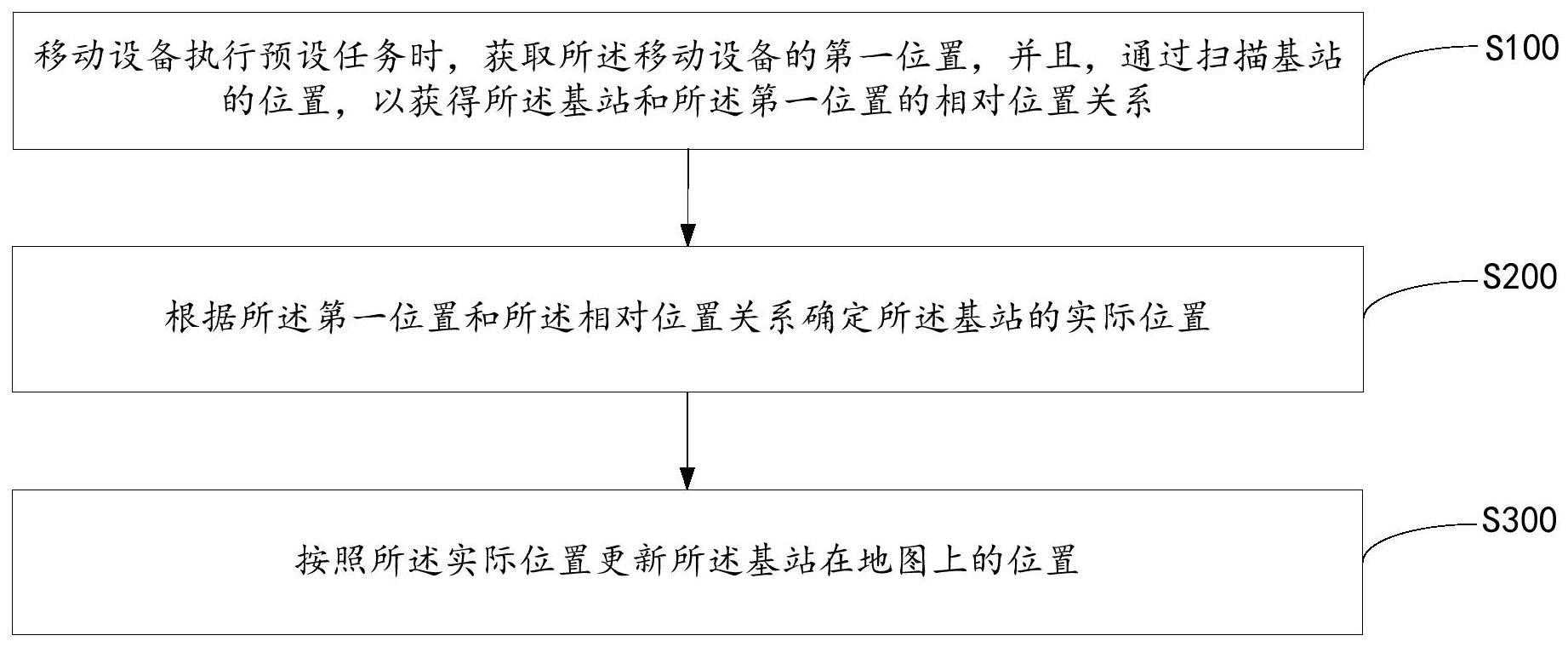
3、移动设备执行预设任务时,获取所述移动设备的第一位置,并且,通过扫描基站的位置,以获得所述基站和所述第一位置的相对位置关系;
4、根据所述第一位置和所述相对位置关系确定所述基站的实际位置;
5、按照所述实际位置更新所述基站在地图上的位置。
6、示例性的,所述预设任务包括移动设备执行的各个子任务中的至少一个;
7、示例性的,所述预设任务包括出基站、进入基站和沿所述基站边缘清扫中的至少一个。
8、示例性的,所述移动设备执行预设任务时,获取所述移动设备的第一位置,并且,通过扫描基站的位置,以获得所述基站和所述第一位置的相对位置关系的步骤包括:
9、所述移动设备执行出基站的任务时,控制所述移动设备移动到指定位置,并且,控制预设检测模块打开第二模式,扫描基站,以获得所述移动设备和所述基站的相对位置关系;
10、将所述预设检测模块的工作模式切换为第一模式,基于所述第一模式检测所述移动设备的第一位置。
11、示例性的,所述控制所述移动设备移动到指定位置的步骤之后,还包括:
12、判断所述移动设备是否保存有当前任务的地图;
13、若是,则执行所述控制预设检测模块打开第二模式,扫描基站,以获得所述移动设备和所述基站的相对位置关系的步骤;
14、若否,则以所述指定位置为起点建立所述当前任务的地图,并根据所述指定位置,以及预设的指定位置与基站的相对位置关系,确定所述基站的实际位置,在所述地图上记录所述基站的实际位置。
15、示例性的,所述移动设备执行预设任务时,获取所述移动设备的第一位置,并且,通过扫描基站的位置,以获得所述基站和所述第一位置的相对位置关系的步骤包括:
16、所述移动设备执行进入基站的任务时,将所述移动设备导航到基站口后获取所述移动设备的第一位置;
17、控制所述移动设备基于所述第一位置转动,扫描基站;
18、在扫描到所述基站时,获取所述移动设备的转动角度,以及获取所述基站与所述移动设备的第一相对位置关系;
19、根据所述第一相对位置关系以及所述转动角度,确定所述基站和所述第一位置的相对位置关系。
20、示例性的,所述控制所述移动设备基于所述第一位置转动,扫描基站的步骤包括:
21、将预设检测模块的工作模式从第一模式切换为第二模式;
22、控制所述移动设备基于所述第一位置转动,以采用第二模式扫描基站。
23、示例性的,所述移动设备执行预设任务时,获取所述移动设备的第一位置,并且,通过扫描基站的位置,以获得所述基站和所述第一位置的相对位置关系的步骤包括:
24、所述移动设备执行沿所述基站边缘清扫的任务时,获取所述移动设备处于基站口时的第一位置;
25、将预设检测模块的工作模式从第一模式切换为第二模式,扫描所述基站,并且,获取所述移动设备的移动信息;
26、在扫描到所述基站时,获取所述移动设备和所述基站的第二相对位置关系;
27、根据所述移动信息和所述第二相对位置关系确定所述基站和所述第一位置的相对位置关系。
28、示例性的,所述移动设备执行预设任务时,获取所述移动设备的第一位置,并且,通过扫描基站的位置,以获得所述基站和所述第一位置的相对位置关系的步骤包括:
29、所述移动设备执行沿所述基站边缘清扫的任务时,检测所述移动设备是否移动到基站口;
30、若是,则将预设检测模块的工作模式从第一模式切换为第二模式,扫描所述基站;
31、在扫描到所述基站时,控制所述移动设备停止,并计算所述基站和所述移动设备的第三相对位置关系;
32、将所述预设检测模块的工作模式切换为所述第一模式,基于所述第一模式检测所述移动设备的第一位置。
33、示例性的,所述预设检测模块的第一模式为普通模式,所述第二模式为光强模式。
34、本发明还提供一种移动设备的基站定位方法,所述移动设备的基站定位方法包括以下步骤:
35、移动设备执行进基站任务时,控制所述移动设备移动到基站口后获取所述移动设备的第一位置;
36、扫描基站的位置,以获得所述基站和所述第一位置的相对位置关系;
37、根据所述第一位置和所述相对位置关系确定所述基站的实际位置;
38、按照所述基站的实际位置,控制所述移动设备进站。
39、示例性的,所述扫描基站的位置,以获得所述基站和所述第一位置的相对位置关系的步骤包括:
40、控制所述移动设备基于所述第一位置转动,扫描基站;
41、在扫描到所述基站时,获取所述移动设备的转动角度,以及获取所述基站与所述移动设备的第一相对位置关系;
42、根据所述第一相对位置关系以及所述转动角度,确定所述基站和所述第一位置的相对位置关系。
43、示例性的,所述移动设备执行进站任务之前,所述基站定位方法还包括:
44、执行出基站的任务时,控制所述移动设备移动到指定位置,并且,控制预设检测模块打开第二模式,扫描基站,以获得所述移动设备和所述基站的相对位置关系;
45、将所述预设检测模块的工作模式切换为第一模式,基于所述第一模式检测所述移动设备的第一位置;
46、根据所述第一位置和所述相对位置关系确定基站的实际位置;
47、基于所述实际位置更新所述基站的位置。
48、示例性的,所述移动设备执行进站任务之前,所述基站定位方法还包括:
49、所述移动设备执行沿所述基站边缘清扫的任务时,获取所述移动设备处于基站口时的第一位置;
50、将预设检测模块的工作模式从第一模式切换为第二模式,扫描所述基站,并且,获取所述移动设备的移动信息;
51、在扫描到所述基站时,获取所述移动设备和所述基站的第二相对位置关系;
52、根据所述移动信息、所述第二相对位置关系以及所述第一位置确定所述基站的实际位置;
53、基于所述实际位置更新所述基站的位置。
54、示例性的,所述移动设备执行进站任务之前,所述基站定位方法还包括:
55、所述移动设备执行沿所述基站边缘清扫的任务时,检测所述移动设备是否移动到基站口;
56、若是,则将预设检测模块的工作模式从第一模式切换为第二模式,扫描所述基站;
57、在扫描到所述基站时,控制所述移动设备停止,并计算所述基站和所述移动设备的第三相对位置关系;
58、将所述预设检测模块的工作模式切换为所述第一模式,基于所述第一模式检测所述移动设备的第一位置;
59、根据所述第一位置和所述第三相对位置关系确定基站的实际位置,所述第三相对位置关系为所述第一位置和所述基站的相对位置关系;
60、基于所述实际位置更新所述基站的位置。
61、示例性的,所述按照所述基站的实际位置,控制所述移动设备进站的步骤包括:
62、按照所述实际位置更新所述基站在地图上的位置,并基于更新后的基站位置控制所述移动设备进站。
63、示例性的,本发明还一种移动设备,所述移动设备包括:存储器、处理器以及存储在所述存储器并可在所述处理器上运行的基站定位程序,所述基站定位程序被所述处理器执行时实现如上所述的移动设备的基站定位方法的步骤。
64、示例性的,本发明还提供一种存储介质,所述存储介质存储有基站定位程序,所述基站定位程序被处理器执行时实现如上所述的移动设备的基站定位方法的步骤。
65、为实现上述目的,本发明提供一种移动设备的基站定位方法、移动设备和存储介质,本实施例中,移动设备执行预设任务时,定位移动设备的自身位置,如第一位置,然后通过扫描基站,以获取基站和第一位置之间的相对位置关系,进而可以基于第一位置和所述相对位置关系计算基站的实际位置,进而更新基站在地图上的实际位置。如此,若基站被移动,则可及时在地图上更新基站移动后的位置,移动设备返回基站时,基于更新后的基站位置导航进站,使得移动设备能够准确高效的返回基站,避免进站失败而影响移动设备的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!