一种基于神经网络对拓扑结构控制方法
本发明属于神经网络学习控制领域,具体涉及一种基于神经网络对拓扑结构控制方法。
背景技术:
1、采用神经网络对拓扑结构进行优化。传感网络的生命周期是衡量传感网络性能优劣的重要指标,在传感网络的工作中,节点的能量的损耗会随着节点的工作次数的增加而增加,当节点能量消耗殆尽时,即我们将该节点判断为生命周期结束,当传感网络中超过半数以上的节点生命周期结束时,我们就可以将该传感网络判定为网络的生命周期结束。在传感网络的生命周期中,某些节点因为位置因素往往会成为多条路径的中间节点,我们将这类的节点称为热点。成为热点的节点能量损耗的速率会远高于其他节点,即热点的生命周期持续时间会更短。热点多的区域,我们称之为热区,热区中的节点生命周期会更快地结束,随着时间的推移,热区就容易形成空洞,即该区域内生命周期未结束的节点数极少,不足以完成该区域信息的采集与信息的传播。传感网络中存在空洞将会导致传感网络性能大幅度下降,亦或是传感网络的生命周期提前结束,因此延长热点的生命周期具有十分重要的意义。
技术实现思路
1、本发明的目的在于提供一种采用神经网络对拓扑结构控制方法,根据现有技术热点的生命周期持续时间短,不足以完成该区域信息的采集与信息的传播的问题,引用神经网络对拓扑结构进行优化,让热点的能耗速率降低,以避免热区出现空洞或使空洞出现的时间尽可能的接近于整个网络生命周期结束的时间。
2、为了达到上述目的,在本发明提供了一种基于神经网络对拓扑结构的控制方法,所述方法为:
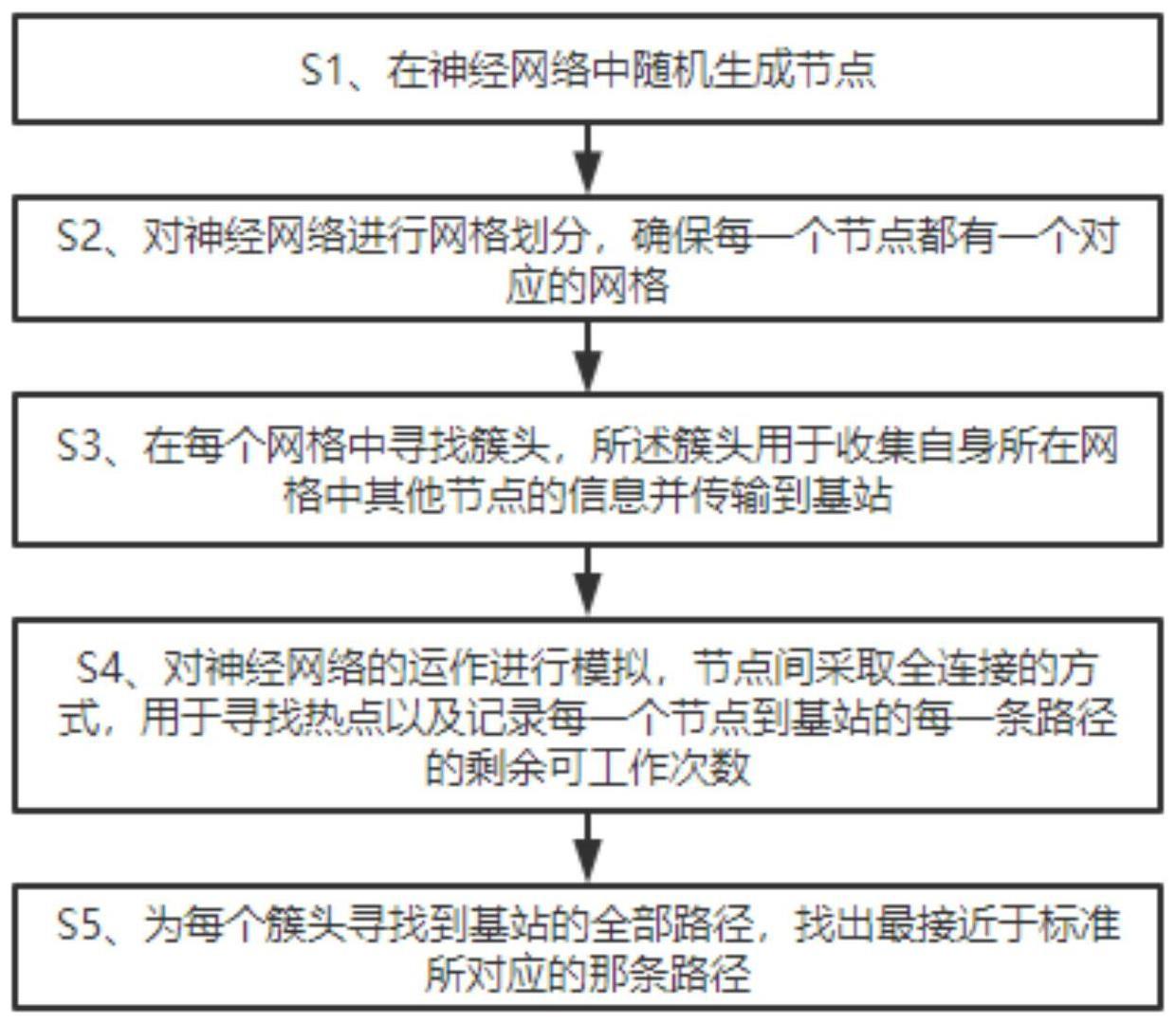
3、s1、在神经网络中随机生成节点;
4、s2、对神经网络进行网格划分,确保每一个节点都有一个对应的网格;
5、s3、在每个网格中寻找簇头,所述簇头用于收集自身所在网格中其他节点的信息并传输到基站;
6、s4、对神经网络的运作进行模拟,节点间采取全连接的方式,用于寻找热点以及记录每一个节点到基站的每一条路径的剩余可工作次数;
7、s5、为每个簇头寻找到基站的全部路径,找出最接近于标准所对应的那条路径。
8、进一步地,所述s3的具体步骤为:
9、s301、计算所述节点的权值;
10、s302、从所述节点中选取剩余能量最大或第二的节点成为簇头。
11、进一步地,所述权值k的表示方式如下所示:
12、
13、其中,权值k取值为0≤k≤1,es为节点的剩余能量,eo为节点的初始能量。
14、进一步地,所述每一条路径的剩余可工作次数为:
15、
16、其中,es(min)表示路径中剩余能量最小的节点的剩余能量,d表示在该路径上,该节点与下一跳节点间的距离。
17、进一步地,所述全部路径为一个路径的集合,所述单条路径要使簇头和基站间实现信息传输功能,且所述路径上的节点不能被重复经过。
18、进一步地,所述每一条路径的剩余可工作次数与全局路径剩余工作次数相比较,找出最接近于标准所对应的那条路径。
19、进一步地,全局路径剩余工作次数为神经网络训练后输出的结果。
20、进一步地,所述神经网络训练的步骤为:
21、构建神经网络,并初始化神经网络的参数;
22、生成训练样本。
23、进一步地,所述参数包括神经网络层数,各层神经元个数,各层神经元连接的权值,学习率和迭代次数;
24、所述神经网络层数包括输入层,隐含层,输出层;
25、所述神经元个数包括所述所述输入层2个,所述隐含层5个,所述输出层1个;
26、所述神经元连接的权值包括所述输入层与所述隐含层的权值为0.5,所述隐含层与所述输出层的权值为0.5;
27、所述学习率为0.01;
28、所述迭代次数包括10000次。
29、进一步地,所述是生成训练样本的步骤为:
30、生成n张随机节点分布图,每张节点图内均匀分布m个节点;
31、对每一张节点图进行拓扑,对每一个节点都进行寻找路径,并计算当前路径的剩余工作次数,求得拓扑图的平均剩余工作次数,将所述平均剩余工作次数做为训练集来训练神经网络;
32、神经网络做数据拟合,最后输出模型收敛的结果,即全局剩余工作次数。
33、本发明的有益技术效果至少在于以下几点:
34、(1)本发明引用神经网络对拓扑结构进行优化,让热点的能耗速率降低,以避免热区出现空洞或使空洞出现的时间尽可能的接近于整个网络生命周期结束的时间;
35、(2)本发明采用绕开热点的形式,以实现降低热点在同一段时间内作为信息传播路径的中间节点的次数,从而延长热点的生命周期,进而延长整个传感网络的生命周期。
技术特征:
1.一种基于神经网络对拓扑结构的控制方法,其特征在于,所述方法为:
2.根据权利要求1所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述s3的具体步骤为:
3.根据权利要求2所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述权值k的表示方式如下所示:
4.根据权利要求3所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述每一条路径的剩余可工作次数为:
5.根据权利要求4所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述全部路径为一个路径的集合,所述单条路径要使簇头和基站间实现信息传输功能,且所述路径上的节点不能被重复经过。
6.根据权利要求4所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述每一条路径的剩余可工作次数与全局路径剩余工作次数相比较,找出最接近于标准所对应的那条路径。
7.根据权利要求6所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,全局路径剩余工作次数为神经网络训练后输出的结果。
8.根据权利要求7所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述神经网络训练的步骤为:
9.根据权利要求8所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述参数包括神经网络层数,各层神经元个数,各层神经元连接的权值,学习率和迭代次数;
10.根据权利要求8所述的一种基于神经网络对拓扑结构的控制方法,其特征在于,所述是生成训练样本的步骤为:
技术总结
本发明提出了一种基于神经网络对拓扑结构的控制方法,方法包括:在神经网络中随机生成节点;对神经网络进行网格划分,确保每一个节点都有一个对应的网格;在每个网格中寻找簇头,所述簇头用于收集自身所在网格中其他节点的信息并传输到基站;对神经网络的运作进行模拟,节点间采取全连接的方式,用于寻找热点以及记录每一个节点到基站的每一条路径的剩余可工作次数;为每个簇头寻找到基站的全部路径,找出最接近于标准所对应的那条路径。本发明引用神经网络对拓扑结构进行优化,让热点的能耗速率降低,以避免热区出现空洞或使空洞出现的时间尽可能的接近于整个网络生命周期结束的时间。
技术研发人员:刘贵云,翟子郎,梁忠伟,钟晓静,程乐峰,刘晓初
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!