一种抗传输时延的弹载传感器目标移动特性获取方法
本发明属于信息处理技术,具体涉及一种抗传输时延的弹载传感器目标移动特性获取方法。
背景技术:
1、随着科学技术的进一步发展,为实现对周边环境、被测目标信息的精确获取,控制系统对测量信息的精确度提出了跟高要求。多源数据融合技术的基本目的是将多传感器数据与系统估计数据通过相应的融合算法进行融合,获得比单一传感器更多为精确的数据信息。一般可以理解为对来自多传感器的原始信息加以智能化综合处理,实现有效地多信源数据处理,从而获得新的、有意义的信息,这种新获得的信息价值比单一传感器所获得的信息要高,更有利于系统的判决和状态感知。
2、根据现有的文献,数据融合滤波技术有两种方法。第一种方法是集中式滤波,将所有传感器的观测数据传输到融合中心,生成精度最高的状态估计。但是,由于数据处理中心需要处理大量数据,将产生严重的计算负担。同时,如果部分传感器出现故障,将直接影响最终的融合结果,导致融合精度和稳定性较差。此外,第二种方法是分布式滤波,该方法是首先在传感器端获得局部估计,再将局部估计根据一定的信息融合算法得到全局最优或次优估计结果。分布式滤波具有较低的复杂度和计算量,且抗传感器故障鲁棒性强于集中式滤波。
3、在过去的几十年中,kalman filtering(kf)在目标检测与跟踪、工业监控、信号处理等领域得到了广泛的研究。特别是distributedkalman filtering(dkf)方法,由于其在动态目标跟踪方面的优异性能,已经发展了很多年。针对多传感器网络控制的便利性,要求传感器网络的能够实现一致性,而一致性控制已广泛应用于无人机编队、集群卫星以及移动机器人的协调等领域。因此,将在本文研究过程中开展对传感器网络的一致性控制方法研究。
4、在参考文献(yang h,li h,xia y,et al.distributed kalman filtering oversensornetworks with transmissiondelays[j].ieee trans cybern,2020),利用时间戳技术设计了一种具有有限长度缓冲区的kf滤波算法,可实现存在传输时延的情况下对多传感器测量数据实现有效融合,然而该算法采用平均一致性控制策略。该策略存在以下缺点:首先,从理论上讲,需要无限次迭代才能达到收敛。其次,在实际应用中,一致性迭代停止策略尚不清楚。
5、在参考文献(wu z,fu m,xuy,et al.a distributed kalman filteringalgorithm with fast finite-time convergence for sensor networks[j].automatica,2018,95:63-72.)中,提出了一种分布式有限时间kf滤波算法,该算法可以利用部分有源部分空闲的传感器网络实现对线性离散动态系统的动态监测,但它未考虑传感器网络中存在时延时对信息融合精度的影响。在实际应用中,由于硬件差异与算法执行延时,通信网络上的信息传输延迟不可避免。由于传输延迟的存在,多传感器系统的滤波精度可能会降低,导致状态估计偏差过大。当误差积累到一定程度时,甚至会影响系统的稳定性,使的滤波算法无法使用。
6、因此结合上述情况,目前还没有文献同时考虑传感器网络的有限时间一致性、通信权值和抗传输延迟。但值得注意的是,若传感器系统存在不一致性和传输延迟将对传感器网络探测精度产生了负面影响,同时也将动态目标跟踪问题复杂化。为此,研究传感器网络的滤波方法具有重要的现实意义。根据上述描述,本发明利用有限时间控制技术与缓存器技术,提出了一种抗传输时延的弹载传感器目标移动特性获取方法。
技术实现思路
1、本发明的目的在于提供一种抗传输时延的弹载传感器目标移动特性获取方法,以便实现传感器网络中存在。
2、实现本发明的技术解决方案为:一种抗传输时延的弹载传感器目标移动特性获取方法,步骤如下:
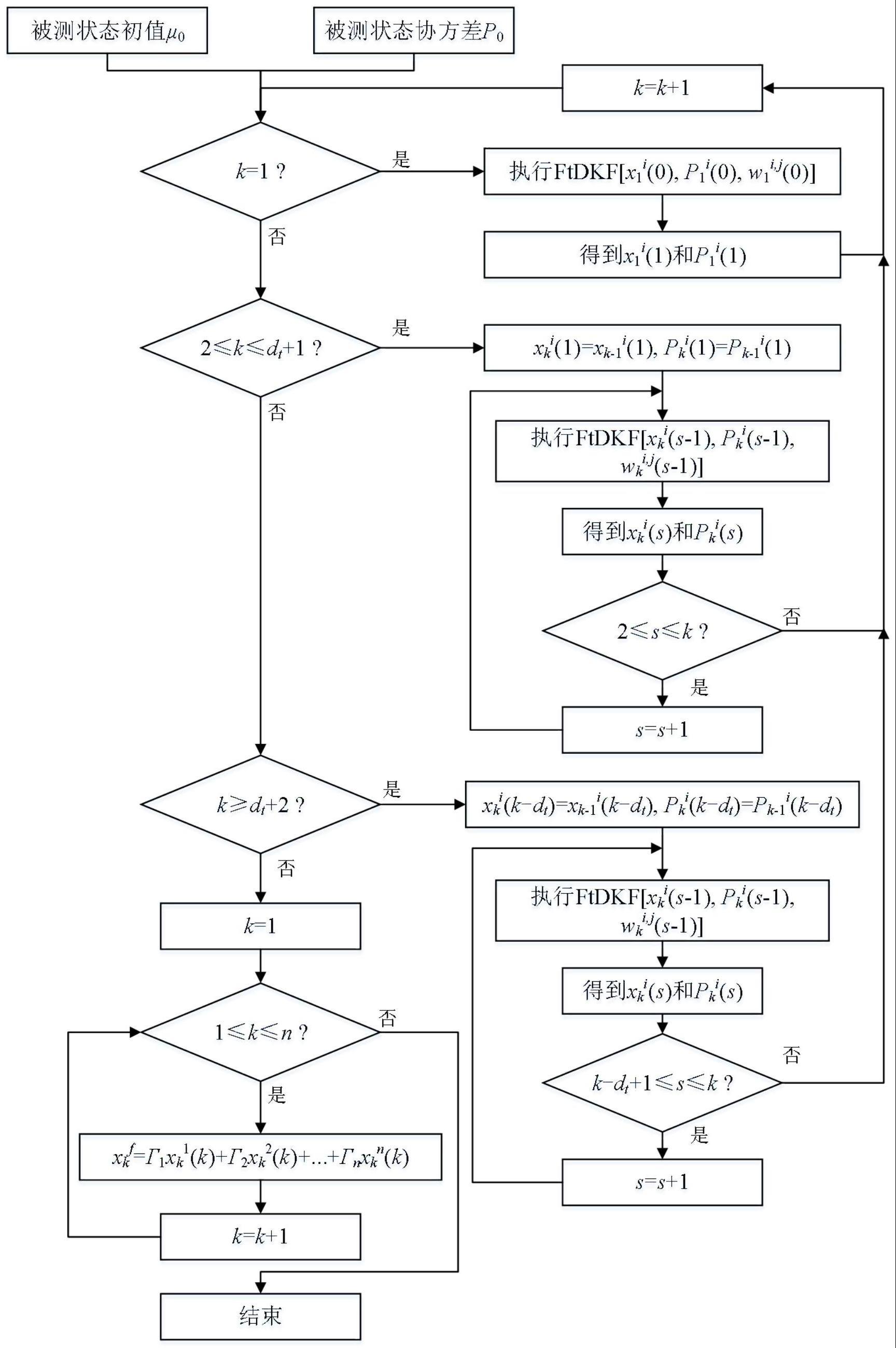
3、步骤1:利用移动目标系统模型估计目标移动特性初值,计算当前时刻k=1时的移动特性融合结果和移动特性协方差转入步骤2。
4、步骤2:对当前时刻k执行加1,判断当前时刻k是否满足2≤k≤dt+1,dt表示信息传输时延边界值,若满足,计算当前时刻k在[2,dt+1]范围内的移动特性融合结果和移动特性协方差转入步骤3;若不满足,转入步骤3。
5、步骤3:对当前时刻k执行加1,判断当前时刻k是否满足k≥dt+2;若满足计算当前时刻k在[dt+2,+∞]范围内的移动特性融合结果和移动特性协方差转入步骤4;若不满足,转入步骤4。
6、步骤4:将不同时刻移动特性进行融合,得到具有最小线性方差意义上的移动特性最优融合结果即获得精确的目标移动特性。
7、本发明与现有技术相比,其显著优点在于:
8、(1)本发明得到的估计误差可经过有限次迭代可实现收敛。
9、(2)本发明对时变传输时延具有良好的鲁棒性。
10、(3)本发明的融合结果具有线性方差最小意义上的最优估计。
11、(4)本发明实现结构简单,复杂度低,可在弱硬件设备下运行。
技术特征:
1.一种抗传输时延的弹载传感器目标移动特性获取方法,其特征在于,步骤如下:
2.根据权利要求1所述的一种抗传输时延的弹载传感器目标移动特性获取方法,其特征在于,步骤1中,利用移动目标系统模型估计初值,计算当前时刻k=1时的移动特性融合结果移动特性协方差具体如下:
3.根据权利要求1所述的一种抗传输时延的弹载传感器目标移动特性获取方法,其特征在于,步骤2中,对当前时刻k执行加1,判断当前时刻k是否满足2≤k≤dt+1,若满足计算当前时刻k在[2,dt+1]范围内的移动特性融合结果移动特性协方差若不满足,求转入步骤3,具体如下:
4.根据权利要求1所述的一种抗传输时延的弹载传感器目标移动特性获取方法,其特征在于,步骤3中,对当前时刻k执行加1,判断当前时刻k是否满足k≥dt+2;若满足计算当前时刻k在[dt+2,+∞]范围内的移动特性融合结果移动特性协方差若不满足,转入步骤4,进行线性方差意义上的最优融合,具体如下:
5.根据权利要求1所述的一种抗传输时延的弹载传感器目标移动特性获取方法,其特征在于,步骤4中,将不同时刻移动特性进行融合,得到具有最小线性方差意义上的最优移动特性融合结果具体如下:
技术总结
本发明公开了一种抗传输时延的弹载传感器目标移动特性获取方法,利用经典Kalman多源数据融合方法,可完成对多个弹载传感器测量数据的高精度融合。其中融合误差经过有限次迭代可实现快速收敛;并且通过采用缓存器技术可实现对时变传输时延具有良好的鲁棒性;最终的融合结果具有线性方差最小意义上的最优估计。不仅如此,该方法结构简单,复杂度低,可在弱硬件设备下运行。
技术研发人员:于航,戴可人,张合,李豪杰,朱杰,马翔
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!