一种基于集员滤波的室内无人机混合定位方法及系统
本发明涉及室内定位领域,尤其涉及一种基于集员滤波的室内无人机混合定位方法及系统。
背景技术:
1、随着移动智能终端、无线通信技术及传感器网络技术的快速发展,对于提供目标位置信息的实时定位服务需求不断增长。现有定位技术包括gps卫星定位技术、红外线定位技术、蓝牙技术以及超宽带(uwb)技术等,被广泛应用于军事、商业、农业等领域,已实现了开阔户外环境下的高精度定位。
2、然而,对于室内环境,上述定位技术仍较大受限于室内环境复杂、建筑物阻挡gps信号、存在多障碍物等因素,难以实现室内移动目标的高精度实时定位。
3、与传统室内定位技术相比,uwb技术具有穿透力强、功耗低及定位精度高的优势,因此被广泛应用于室内无线通信定位场景中。
4、但是使用uwb技术进行定位的过程中,依然存在待定位目标位置信息突变,或受到墙壁等障碍物遮蔽,从而导致uwb定位精度较低的问题。
技术实现思路
1、有鉴于此,本发明的目的在于公开一种基于集员滤波的室内无人机混合定位方法及系统,解决如何提高利用uwb技术对室内无人机进行定位的精度的问题。
2、为了达到上述目的,本发明提供如下技术方案:
3、第一个方面,本发明提供了一种基于集员滤波的室内无人机混合定位方法,包括:
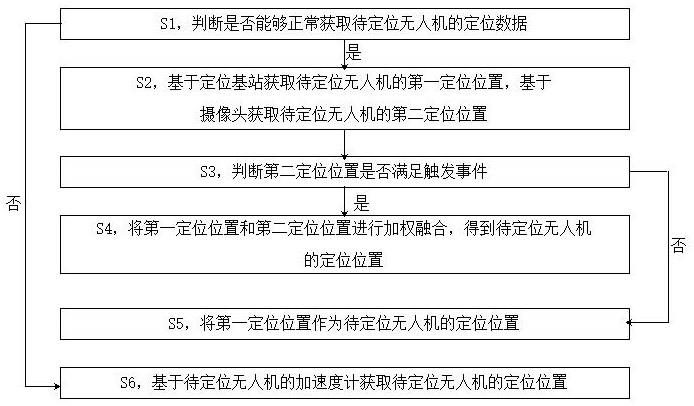
4、s1,判断是否能够正常获取待定位无人机的定位数据,若是,则进入s2,若否,则进入s6;
5、s2,基于定位基站获取待定位无人机的第一定位位置,基于摄像头获取待定位无人机的第二定位位置;
6、s3,判断第二定位位置是否满足触发事件,若是,则进入s4,若否,则进入s5;
7、s4,将第一定位位置和第二定位位置进行加权融合,得到待定位无人机的定位位置;
8、s5,将第一定位位置作为待定位无人机的定位位置;
9、s6,基于待定位无人机的加速度计获取待定位无人机的定位位置。
10、可选的,定位数据包括待定位无人机与定位基站之间的距离和包含待定位无人机的目标图像。
11、可选的,判断是否能够正常获取待定位无人机的定位数据,包括:
12、若无法获取待定位无人机的与定位基站之间的距离和/或无法获取包含待定位无人机的图像,则表示不能正常获取待定位无人机的定位数据。
13、可选的,基于定位基站获取待定位无人机的第一定位位置,包括:
14、通过多个定位基站对待定位无人机进行uwb测距,获得多个待定位无人机的与定位基站之间的距离;
15、基于多个待定位无人机的与定位基站之间的距离计算得到无人机的第一定位位置。
16、可选的,基于摄像头获取待定位无人机的第二定位位置,包括:
17、通过至少两个摄像头获取包含待定位无人机的目标图像;
18、基于目标图像计算待定位无人机的第二定位位置。
19、可选的,判断第二定位位置是否满足触发事件,包括:
20、计算当前时刻的第二定位位置与前一时刻的第二定位位置之间的距离;
21、若距离大于设定的触发事件阈值,则表示第二定位位置满足触发事件,若距离小于等于设定的触发事件阈值,则表示第二定位位置不满足触发事件。
22、可选的,将第一定位位置和第二定位位置进行加权融合,得到待定位无人机的定位位置,包括:
23、根据目标图像获得的室内障碍物的遮挡系数;
24、基于遮挡系数分别确定第一定位位置和第二定位位置的权重;
25、基于第一定位位置和第二定位位置的权重对第一定位位置和第二定位位置进行加权计算,得到待定位无人机的定位位置。
26、可选的,基于待定位无人机的加速度计获取待定位无人机的定位位置,包括:
27、用(, , )表示距离无法正常获取待定位无人机的定位数据的初始时刻最近的时刻的无人机的位置;
28、建立动力学模型;
29、获取无人机在从到定位时刻t之间的各个时刻的加速度;
30、将加速度输入到动力学模型中,得到无人机在定位时刻t的定位位置(, ,z)。
31、可选的,动力学模型如下:
32、
33、
34、
35、其中,,和是待定位无人机在时刻的三维速度,在时刻,待定位无人机初始速度为0,= = =0;, 和表示待定位无人机在时刻的三维加速度。
36、第二个方面,本发明提供了一种基于集员滤波的室内无人机混合定位系统,包括数据获取判断模块、初次定位模块、触发事件判断模块、二次定位模块和加速度定位模块;
37、数据获取判断模块用于判断是否能够正常获取待定位无人机的定位数据;
38、初次定位模块用于在能够正常获取待定位无人机的定位数据时,基于定位基站获取待定位无人机的第一定位位置,基于摄像头获取待定位无人机的第二定位位置;
39、触发事件判断模块用于判断第二定位位置是否满足触发事件;
40、二次定位模块用于在第二定位位置没有满足触发事件时,将第一定位位置作为待定位无人机的定位位置,以及用于在第二定位位置满足触发事件时,将第一定位位置和第二定位位置进行加权融合,得到待定位无人机的定位位置;
41、加速度定位模块用于在不能正常获取待定位无人机的定位数据时,基于待定位无人机的加速度计获取待定位无人机的定位位置。
42、本发明将uwb定位结果与摄像头测距技术所得位置信息加权融合,排除了在复杂室内环境下单纯采用uwb测距受墙壁等壁垒的影响,和单纯采用多摄像头定位时摄像头图像采集受到障碍物遮蔽的影响,提高了待定位无人机在复杂室内环境中的定位精度。在外设传感器数据丢失或不可靠情况下,通过机载传感器获取机身加速度数据,建立动力学模型估计位置信息,为室内无人机的实时定位提供保障。
技术特征:
1.一种基于集员滤波的室内无人机混合定位方法,其特征在于,包括:
2.根据权利要求1所述的一种基于集员滤波的室内无人机混合定位方法,其特征在于,定位数据包括待定位无人机与定位基站之间的距离和包含待定位无人机的目标图像。
3.根据权利要求2所述的一种基于集员滤波的室内无人机混合定位方法,其特征在于,判断是否能够正常获取待定位无人机的定位数据,包括:
4.根据权利要求1所述的一种基于集员滤波的室内无人机混合定位方法,其特征在于,基于摄像头获取待定位无人机的第二定位位置,包括:
5.根据权利要求1所述的一种基于集员滤波的室内无人机混合定位方法,其特征在于,判断第二定位位置是否满足触发事件,包括:
6.根据权利要求2所述的一种基于集员滤波的室内无人机混合定位方法,其特征在于,将第一定位位置和第二定位位置进行加权融合,得到待定位无人机的定位位置,包括:
7.根据权利要求1所述的一种基于集员滤波的室内无人机混合定位方法,其特征在于,基于待定位无人机的加速度计获取待定位无人机的定位位置,包括:
8.根据权利要求7所述的一种基于集员滤波的室内无人机混合定位方法,其特征在于,动力学模型如下:
9.一种基于集员滤波的室内无人机混合定位系统,其特征在于,包括数据获取判断模块、初次定位模块、触发事件判断模块、二次定位模块和加速度定位模块;
技术总结
本发明属于室内定位领域,公开了一种基于集员滤波的室内无人机混合定位方法及系统,方法包括:S1,判断是否能够正常获取待定位无人机的定位数据,若是,则进入S2,若否,则进入S6;S2,基于定位基站获取待定位无人机的第一定位位置,基于摄像头获取待定位无人机的第二定位位置;S3,判断第二定位位置是否满足触发事件,若是,则进入S4,若否,则进入S5;S4,将第一定位位置和第二定位位置进行加权融合,得到待定位无人机的定位位置;S5,将第一定位位置作为待定位无人机的定位位置;S6,基于待定位无人机的加速度计获取待定位无人机的定位位置。本发明提高了待定位无人机在复杂室内环境中的定位精度。
技术研发人员:鲁仁全,甘怡婷,徐雍,饶红霞,钟毅,赵曜
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!