一种车辆远程驾驶视频传输方法及系统与流程
本发明属于车辆远程驾驶领域,具体涉及一种车辆远程驾驶视频传输方法及系统。
背景技术:
1、在某些复杂场景中,例如在矿区、港口等,远程驾驶代替自动驾驶车辆做出决策,可以提高自动驾驶的安全性和可靠性,减少交通事 故和人员伤亡;甚至在自动驾驶车辆出现问题时,驾驶员能及时接管,可以消除车辆异常,改变车辆失控状态,避免车辆伤害到行人和其他车辆。
2、远程驾驶主要依赖于车身周围的摄像头获取四周环境视频,通过无线通信传输到远程驾驶控制室,驾驶员根据视频信息判断路况及时控制车辆。
3、比如申请号:202021639323.2公开了一种5g远程驾驶系统,该文件涉及驾驶系统本体和辅助系统,该文件的驾驶系统本体包括座椅底盘、方向盘、高频振动座椅、画面显示屏、扬声器和控制模块,该文件的辅助系统包括5g基站、信息采集模块、信息接收模块、目标检测模块、目标识别模块、目标跟踪模块、语义分割模块、道路检测模块、道路线识别模块、道路面方程模块、测距模块和整合模块。该文件的5g远程驾驶系统,通过驾驶系统本体和座椅底盘的结构,用于接收车辆的车辆姿态信息,并模拟车辆姿态信息进行姿态转动,该文件通过方向盘和高频振动座椅的结构,用于模拟还原实车驾驶振动。
4、虽然上述文件实现了远程驾驶控制,但是在远程监控和驾驶的过程中,由于网络延时存在,可能出现远程驾驶员无法及时获取到清晰的视频信息的情况,从而导致无人驾驶设备存在安全隐患。所以,如何能够有效地提高视频传输的效率,则是一个亟待解决的问题。
技术实现思路
1、为了降低通信延迟问题,本发明提供一种车辆远程驾驶视频传输方法,方法通过ffmpeg将视频编码成h.265改善码流和编码质量,然后采用rtsp视频流和5g网实现视频实时传输,可提高视频清晰度、系统兼容性和传输速率稳定性。
2、方法包括:
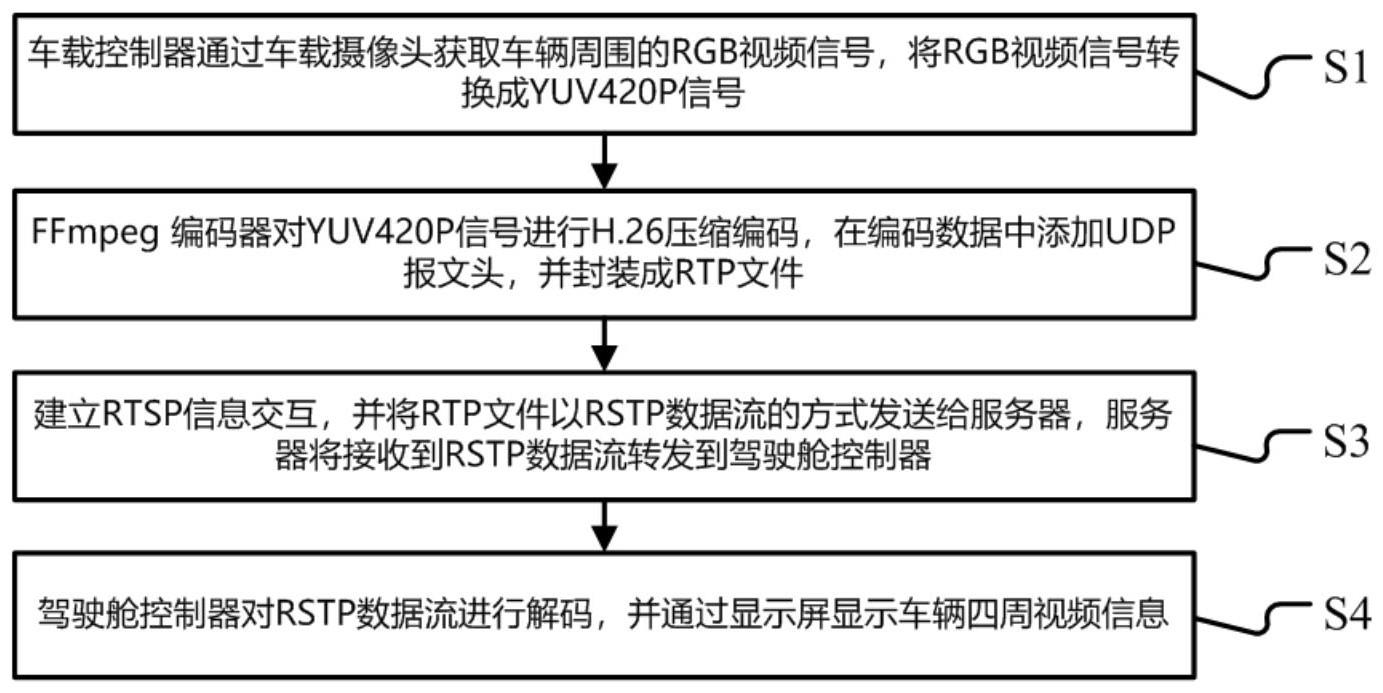
3、s1、车载控制器通过车载摄像头获取车辆周围的rgb视频信号,将rgb视频信号转换成yuv420p信号;
4、s2、ffmpeg 编码器对yuv420p信号进行h.26压缩编码,在编码数据中添加udp 报文头,并封装成rtp文件;
5、s3、建立rtsp信息交互,并将rtp文件以rstp数据流的方式发送给服务器,服务器将接收到rstp数据流转发到驾驶舱控制器;
6、s4、驾驶舱控制器对rstp数据流进行解码,并通过显示屏显示车辆四周视频信息。
7、进一步需要说明的是,步骤s1中还包括如下步骤:车载摄像头通过 gmsl2 四合一协议接口与车载控制器连接。
8、进一步需要说明的是,步骤s1中每一路车载摄像头输入信号进入车载控制器后,通过解串器解串成 mipi-csi2信号后输入到车载控制器的soc系统。
9、进一步需要说明的是,步骤s1中,soc系统通过ros开源元操作系统获取 rgb视频信号,并通过 opencv模块将 rgb 视频图像转换成 yuv420p 信号。
10、进一步需要说明的是,步骤s2还包括如下步骤:
11、在 soc 系统中安装 ffmpeg插件,并注册 ffmpeg所有编码器,初始化码流数据,设置编码的参数和格式,将 yuv420p 像素数据转换 到编码需要的 avframe 结构体中,并将 avframe 结构体中存储的 yuv像素数据编码成 h.265 格式的码流数据,将编码数据添加 udp 报文头,再分片打包成rtp文件。
12、进一步需要说明的是,步骤s3具体包括如下步骤:
13、建立服务器和驾驶舱控制器之间的请求,并响应rstp数据流连接,在5g专网下车载控制器首先通过 socket()函数初始化 socket 对象并设置参数,然后connect()函数连接指定ip地址的服务器;
14、将封装的rstp数据流通过 send()函数推送到远程的服务器;
15、服务器处于监听模式,当检测到接收端口信息后接收rtsp数据流并转发到驾驶舱控制器中。
16、进一步需要说明的是,s4 还包括如下步骤:
17、驾驶舱控制器接收到服务器转发的rstp数据流,通过vlc media player 拉流视频数据,解码压缩数据流数据并在驾驶舱显示屏展示车辆四周的实时视频。
18、本发明还提供一种车辆远程驾驶视频传输系统,系统包括:车载控制器、车载摄像头、编码器、服务器、驾驶舱控制器以及显示屏;
19、车载控制器通过车载摄像头获取车辆周围的rgb视频信号,将rgb视频信号转换成yuv420p信号;
20、编码器用于对yuv420p信号进行h.26压缩编码,在编码数据中添加udp 报文头,并封装成rtp文件;
21、车载控制器还用于建立rtsp信息交互,并将rtp文件以rstp数据流的方式发送给服务器,服务器将接收到rstp数据流转发到驾驶舱控制器;
22、驾驶舱控制器用于对rstp数据流进行解码,并通过显示屏显示车辆四周视频信息。
23、进一步需要说明的是,系统还包括:gmsl2 四合一协议接口以及储存器;车载摄像头采用四路车载摄像头相机;车载控制器配置有soc系统;储存器存储有soc系统、ros开源元操作系统、opencv模块以及ffmpeg插件;
24、四路车载摄像头相机通过 gmsl2 四合一协议接口连接车载控制器,每一路摄像头输入信号进入车载控制器后,通过解串器解串成 mipi-csi2 后输入到车载控制器的soc系统。
25、从以上技术方案可以看出,本发明具有以下优点:
26、本发明能够对车辆周围的视频信息及时处理并传输给驾驶舱控制器,进行实时显示,方便驾驶员和监控人员进行观看,有效的提升车辆驾驶的安全性。还能够对视频信号高效率地收集、存储,并进行传输,可以基于车辆行驶状态以及车辆周围环境状态实现实时观测,使用多维空间描述整个驾驶过程。及时发现在车辆行驶过程中的安全隐患,优选地可以进行预警,以提高车辆行驶过程的安全性,降低车辆驾驶风险,从而实现车辆驾驶全过程监督和控制的及时性和科学性。
技术特征:
1.一种车辆远程驾驶视频传输方法,其特征在于,方法包括:
2.根据权利要求1所述的车辆远程驾驶视频传输方法,其特征在于,步骤s1中还包括如下步骤:车载摄像头通过 gmsl2 四合一协议接口与车载控制器连接。
3.根据权利要求2所述的车辆远程驾驶视频传输方法,其特征在于,步骤s1中每一路车载摄像头输入信号进入车载控制器后,通过解串器解串成 mipi-csi2信号后输入到车载控制器的soc系统。
4.根据权利要求3所述的车辆远程驾驶视频传输方法,其特征在于,步骤s1中,soc系统通过ros开源元操作系统获取 rgb视频信号,并通过 opencv模块将 rgb 视频图像转换成yuv420p 信号。
5.根据权利要求3所述的车辆远程驾驶视频传输方法,其特征在于,步骤s2还包括如下步骤:
6.根据权利要求1所述的车辆远程驾驶视频传输方法,其特征在于,步骤s3具体包括如下步骤:
7.根据权利要求1所述的车辆远程驾驶视频传输方法,其特征在于,
8.一种车辆远程驾驶视频传输系统,其特征在于,系统采用如权利要求1至7任意一项所述的车辆远程驾驶视频传输方法;
9.根据权利要求8所述的车辆远程驾驶视频传输系统,其特征在于,
技术总结
本发明提供一种车辆远程驾驶视频传输方法及系统,属于车辆远程驾驶领域,车载控制器通过车载摄像头获取车辆周围的RGB视频信号,将RGB视频信号转换成YUV420P信号;FFmpeg编码器对YUV420P信号进行H.26压缩编码,在编码数据中添加UDP报文头,并封装成RTP文件;建立RTSP信息交互,并将RTP文件以RSTP数据流的方式发送给服务器,服务器将接收到RSTP数据流转发到驾驶舱控制器;驾驶舱控制器对RSTP数据流进行解码,并通过显示屏显示车辆四周视频信息。本发明可以实时观察车辆周围环境,保证远程驾驶车辆的安全行驶。
技术研发人员:张跃,田磊,杨孟,韩孝雷,赵玉超
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!