基于干扰矢量和物理特征的无人机干扰源定位方法及系统与流程
本发明涉及轨道交通,具体涉及一种基于干扰矢量和物理特征的无人机干扰源定位方法及系统。
背景技术:
1、城市轨道交通多采用cbtc(基于通信的列车自动控制系统)作为列车运营控制系统。它的特点是用通信媒体来实现列车和地面设备的双向通信,其突出优点是可以实现车—地之间的双向通信,并且传输信息量大,传输速度快等等。
2、cbtc系统的列车和地面设备的通信由列车到轨旁的无线通信与轨旁到机房的有线通信组成。车地无线通信的畅通和安全是保证整个cbtc系统正常运行的重要环节,现在的车地无线通信是由终端通过wifi网络或者lte网络接入无线网络。轨道行业使用lte网络使用1.8ghz通信频段,该频段属于专网频段,机场、港口等行业均可以使用,存在覆盖范围超限导致对轨道运行环境造成干扰;wifi网络使用2.4ghz通信频段,2.4ghz ism(industryscience medicine)是全世界公开通用使用的无线频段,民间的私人无线电通信设备,工厂、广播电视等大功率无线电设备等都会对轨道运行环境造成干扰。上述情况均会影响轨道交通控制系统的正常通信,更可能对人民的财产安全造成一定程度的威胁。
3、由于各种无线通信干扰源分布区域较大,现有技术无法对干扰源进行精确定位,使得无法排除安全隐患。
技术实现思路
1、本发明的目的是为了提供一种基于干扰矢量和物理特征的无人机干扰源定位方法及系统。旨在解决由于各种无线通信干扰源分布区域较大,现有技术无法对干扰源进行精确定位,使得无法排除安全隐患的问题。
2、为达到上述目的,本发明通过以下技术方案实现:
3、一方面,本发明提供了一种基于干扰矢量和物理特征的无人机干扰源定位方法,包括:
4、地面控制中心获取无人机收集到的干扰源的物理特征,通过所述干扰源的物理特征,对所述干扰源进行若干次定位,建立矢量定位模型,以定位所述干扰源的实际位置。
5、优选的,所述的获取无人机收集到的干扰源的物理特征,其具体包括:
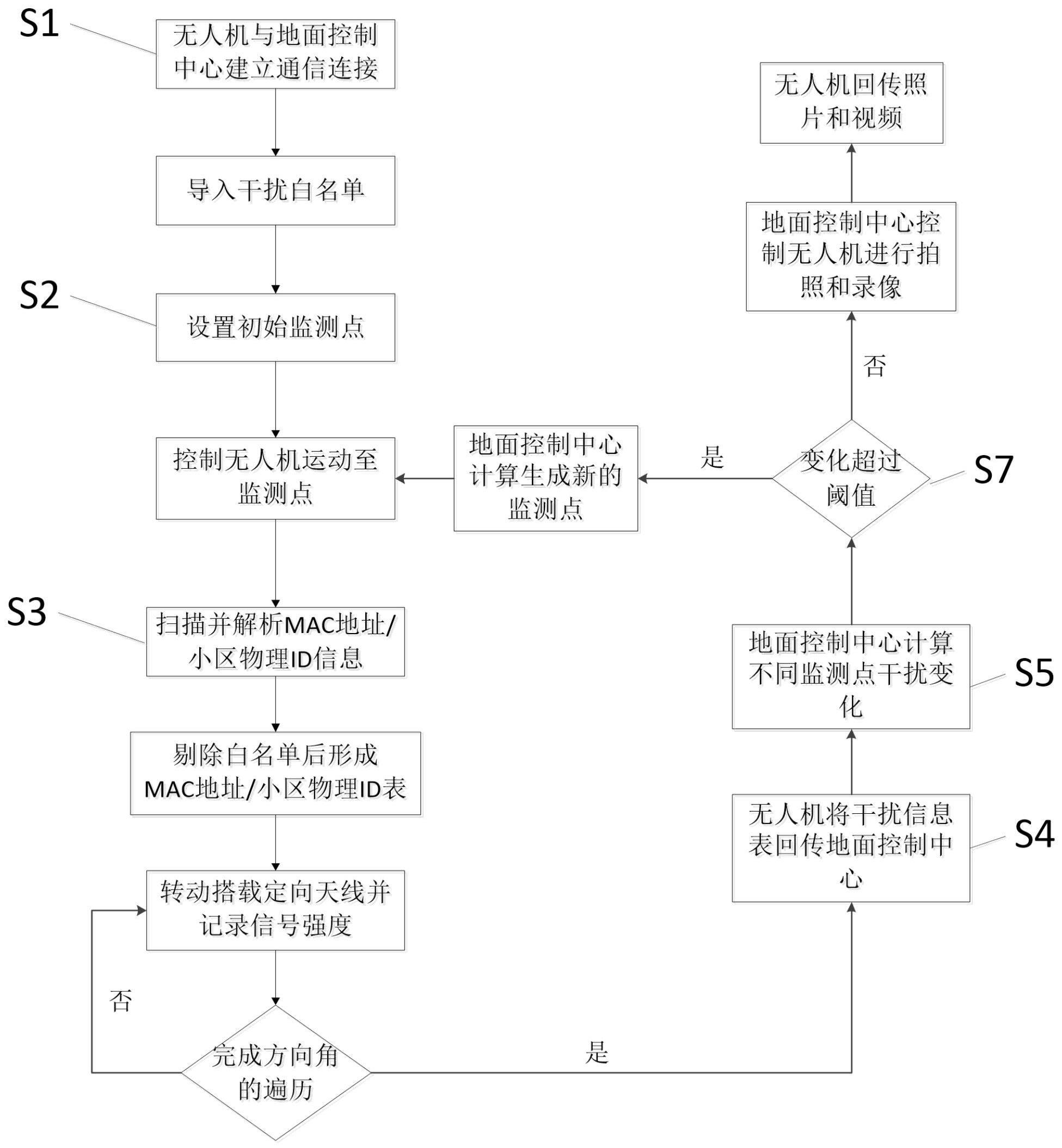
6、建立所述无人机与地面控制中心的通信连接,所述地面控制中心获取所述无人机收集到的干扰源的物理特征,并控制所述无人机的飞行。
7、优选的,所述地面控制中心获取所述无人机收集到的干扰源的物理特征,并控制所述无人机的飞行,其具体包括:
8、所述地面控制中心向所述无人机传输干扰白名单的物理地址;
9、所述地面控制中心定义一监测点;
10、所述地面控制中心控制所述无人机向所述监测点飞行;
11、所述无人机到达所述监测点后,进行扫描并解析无线接入点的物理地址,得到解析的无线接入点的物理地址,从所述解析的无线接入点的物理地址中剔除所述干扰白名单的物理地址,得到物理地址表。
12、优选的,所述地面控制中心获取所述无人机收集到的干扰源的物理特征,还包括:
13、根据所述物理地址表,得到所述干扰源的物理特征,所述无人机将所述干扰源的物理特征传输至所述地面控制中心。
14、优选的,所述根据所述物理地址表,得到所述干扰源的物理特征,其具体包括:
15、分别转动所述无人机机载天线的水平转台和垂直转台至一预定角度,记录所述物理地址表中每一物理地址对应的所述干扰源的水平强度和垂直强度,重复转动所述水平转台和垂直转台至下一预定角度,直至完成不同水平方向角和垂直方向角的遍历。
16、优选的,所述无人机将记录的所述干扰源的水平强度和垂直强度、及所述无人机的全球导航卫星系统定位信息传输至所述地面控制中心。
17、优选的,对所述干扰源进行若干次定位,其具体包括:
18、所述地面控制中心定义不同的若干个监测点,所述地面控制中心控制所述无人机分别向不同的监测点飞行,所述无人机在每一所述监测点,记录所述干扰源的物理特征。
19、优选的,对所述干扰源进行若干次定位,建立矢量定位模型,其具体还包括:
20、所述地面控制中心建立矢量定位模型,根据所述矢量定位模型,计算不同监测点所述干扰源的物理特征的变化,判定所述变化与预定的阈值的大小。
21、优选的,所述判定所述变化与预定的阈值的大小,其具体包括:
22、当所述变化超过所述预定的阈值,则所述地面控制中心计算生成新的监测点,控制所述无人机飞行至所述新的监测点,重新记录所述新的监测点处干扰源的物理特征;
23、当所述变化不超过所述预定的阈值,则所述地面控制中心控制所述无人机进行拍照和录像,得到对应的照片和视频。
24、优选的,还包括:所述无人机将所述照片和所述视频传输至所述地面控制中心,以完成对所述干扰源实际位置的定位。
25、另一方面,本发明还提供了一种基于干扰矢量和物理特征的无人机干扰源定位系统,包括:地面部分和无人机机载部分,
26、所述地面部分与所述无人机机载部分通信连接,所述地面部分和所述无人机机载部分执行上述的基于干扰矢量和物理特征的无人机干扰源定位方法,定位所述干扰源的实际位置。
27、优选的,所述地面部分为地面控制中心,其控制所述无人机机载部分的飞行,同时获取所述无人机机载部分传输的数据,并对所述无人机机载部分传输的数据进行处理。
28、优选的,所述无人机机载部分获取所述干扰源的干扰信息,并将所述干扰信息传输至所述地面控制中心。
29、与现有技术相比,本发明具有以下有益效果:
30、1、本发明提供的基于干扰矢量和物理特征的无人机干扰源定位方法及系统,通过地面部分与无人机的通信连接,在地面部分进行计算,降低无人机本身飞控系统的计算压力;
31、2、本发明通过导入干扰白名单,降低在干扰排查过程中的无效计算;
32、3、本发明使用矢量定位模型进行干扰源的定位,使得定位更加精确;
33、4、本发明除使用gnss进行定位外,还使用干扰源照片和干扰源周围环境视频的方式,降低后期实地处理干扰源定位难度。
技术特征:
1.一种基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,包括:
2.如权利要求1所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,所述的获取无人机收集到的干扰源的物理特征,其具体包括:
3.如权利要求2所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,所述地面控制中心获取所述无人机收集到的干扰源的物理特征,并控制所述无人机的飞行,其具体包括:
4.如权利要求3所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,所述地面控制中心获取所述无人机收集到的干扰源的物理特征,还包括:
5.如权利要求4所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,所述根据所述物理地址表,得到所述干扰源的物理特征,其具体包括:
6.如权利要求5所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,所述无人机将记录的所述干扰源的水平强度和垂直强度、及所述无人机的全球导航卫星系统定位信息传输至所述地面控制中心。
7.如权利要求6所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,对所述干扰源进行若干次定位,其具体包括:
8.如权利要求7所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,对所述干扰源进行若干次定位,建立矢量定位模型,其具体还包括:
9.如权利要求8所述的基于干扰矢量和物理特征的无人机干扰源定位方法,其特征在于,所述判定所述变化与预定的阈值的大小,其具体包括:
10.还包括:所述无人机将所述照片和所述视频传输至所述地面控制中心,以完成对所述干扰源实际位置的定位。
11.一种基于干扰矢量和物理特征的无人机干扰源定位系统,其特征在于,包括:地面部分和无人机机载部分,
12.如权利要求11所述的基于干扰矢量和物理特征的无人机干扰源定位系统,其特征在于,所述地面部分为地面控制中心,其控制所述无人机机载部分的飞行,同时获取所述无人机机载部分传输的数据,并对所述无人机机载部分传输的数据进行处理。
13.如权利要求12所述的基于干扰矢量和物理特征的无人机干扰源定位系统,其特征在于,所述无人机机载部分获取所述干扰源的干扰信息,并将所述干扰信息传输至所述地面控制中心。
技术总结
本发明公开了一种基于干扰矢量和物理特征的无人机干扰源定位方法及系统,所述方法包括:获取无人机收集到的干扰源的物理特征,通过所述干扰源的物理特征,对所述干扰源进行若干次定位,建立矢量定位模型,以定位所述干扰源的实际位置。本发明通过地面部分与无人机的通信连接,在地面部分进行计算,降低无人机本身飞控系统的计算压力;通过导入干扰白名单,降低在干扰排查过程中的无效计算;使用矢量定位模型进行干扰源的定位,使得定位更加精确;除使用GNSS进行定位外,还使用干扰源照片和干扰源周围环境视频的方式,降低后期实地处理干扰源定位难度。
技术研发人员:马钰昕,苏阿峰,季庆华,叶云龙,张宜远,韩熠,朱林贤,刘螺辉
受保护的技术使用者:卡斯柯信号有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!