一种基于无人预警系统的控制方法与流程
本发明属于安防监控,特别是涉及一种基于无人预警系统的控制方法。
背景技术:
1、市面上常用的无人红外预警系统有两种方案,第一种为成对工作,分为预警发射端和预警接收端。预警发射端中的红外射线通过透镜组发出,预警接收端中的透镜组接收到红外射线。若预警接收端能够实时接收到红外射线则不报警,当存在可疑目标遮挡红外射线,导致预警接收端中的透镜组无法接收到红外射线时,由预警接收端发出预警信息。第一种无人预警系统体积很大,总体积一般超过2000cm3,且必须成对工作,隐蔽性差,目标明显,在一些需要实现隐秘监控的应用场景,如监狱、电子封疆等,这种方式的无人预警应用受限。另外,市面上的无人预警系统一般由市电接适配器供电,无低功耗优化设计,无法实现自驱动工作,在野外不易获取市电的应用场景下使用受限。第二种无人预警系统使用红外模组配合菲涅尔透镜,这种预警系统一般为家用,预警距离一般为5m以内,使用场景受限。两种无人预警方案均未考虑无线预警信息传输的应用,在野外无移动信号区域,使用受限。
2、综上所述,现有技术存在的问题是:现有两种方案或体积大,隐蔽性差,且必须成对工作,功耗高,无法实现自驱动工作,或预警距离过近,且均未考虑无线预警信息传输的应用。
技术实现思路
1、本发明目的是为了解决现有技术中的问题,提出了一种基于无人预警系统的控制方法。
2、本发明是通过以下技术方案实现的,本发明提出一种基于无人预警系统的控制方法,所述方法具体为:
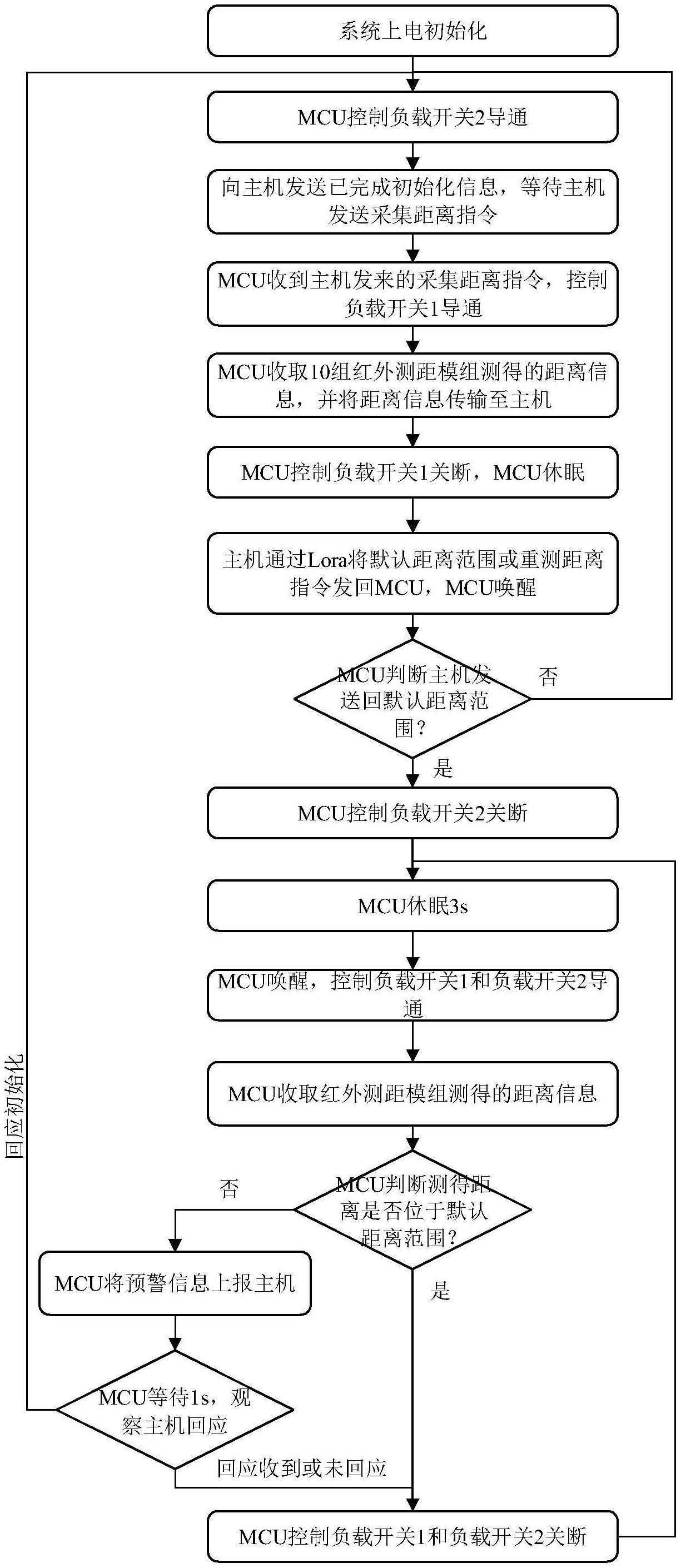
3、s1:系统上电初始化;
4、s2:mcu控制负载开关2导通;
5、s3:向主机发送已完成初始化信息,等待主机发送采集距离指令;
6、s4:mcu收到主机通发来的采集距离指令,控制负载开关1导通;
7、s5:mcu收取多组红外测距模组测得的距离信息,并将距离信息传输至主机;
8、s6:mcu控制负载开关1关断,mcu休眠;
9、s7:主机通过lora将默认距离范围或重测距离指令发回mcu,mcu唤醒;
10、s8:mcu判断主机发送回的信息是否为默认距离范围,若是,则进入s9,若否,则回到s2;
11、s9:mcu控制负载开关2关断;
12、s10:mcu休眠3s;
13、s11:mcu唤醒,控制负载开关1和负载开关2导通;
14、s12:mcu收取红外测距模组测得的距离信息;
15、s13:mcu判断测得的距离是否位于默认距离范围,若是,则直接进入s16,若否,则进入s14;
16、s14:mcu将预警信息上报主机,之后进入s15;
17、s15:mcu等待1s,观察主机回应,若回应初始化信息,则回到s2,若回应收到信息或1s内无回应,则执行s16;
18、s16:mcu控制负载开关1和负载开关2关断,回到s10。
19、进一步地,所述无人预警系统包括多个红外预警节点及远程主机;所述多个红外预警节点与远程主机通过lora无线通信组成预警网络;每个红外预警节点均包括光伏板、外部充电口、pmic、充电管理、防倒灌电路、储能电池、buck电路、负载开关1、负载开关2、红外测距模组、mcu和lora模块。
20、进一步地,光伏板通过pmic和防倒灌电路连接到储能电池,外部充电口通过充电管理和防倒灌电路连接到储能电池,两个防倒灌电路同时连接到储能电池,实现两种能量输入防倒灌,并对储能电池的充能及后级负载供电;储能电池电压经buck电路降压3.3v,可供红外测距模组、mcu和lora模块供电;buck后级跟负载开关1和负载开关2,并直接连接mcu,负载开关1和负载开关2的导通关断受mcu控制,负载开关1控制红外测距模组供电,负载开关2控制lora模块供电。
21、进一步地,在s5中,mcu采集多组距离数据并上传主机,由主机判断当前位置是否合理,若合理,则回传默认距离范围,该距离范围将作为s13的默认距离范围判定依据;若不合理,则回传重测距离指令。
22、进一步地,在s8中,mcu由lora信息唤醒后判断lora回传的信息是否为默认距离范围信息,若是,则进入周期性距离测量环节,若否,则回到s2重新发起初始化操作,在该阶段,用户可以调整红外预警节点位置,调整完毕后,通过主机发送采集距离指令。
23、进一步地,在s10-s16中,mcu周期性休眠唤醒,进行距离采集与判定,由于休眠期间两个负载开关均关断,红外测距模组和lora模块不耗电,只有mcu休眠功耗,而唤醒后进行数据测量、判定和无线数据传输耗时极短,因此大大的降低了系统整体功耗。
24、进一步地,在s15中,预留了一个用户配置通道,当用户完成红外预警节点配置后需要重新调整该节点位置时,可通过挪动红外预警节点,使其测量距离小于预设距离范围,之后在主机端配置模式为初始化回应模式,则主机接收到红外预警节点的预警信息后将不再回应收到信息,将回应初始化信息,红外预警节点将重新回到s2,重新进入初始化配置环节。
25、本发明有益效果:
26、本发明所提出的红外预警节点体积小巧,可低于80cm3,无需成对工作,隐蔽性强,所提出的控制方法支持光伏自驱动工作,可长期实现自我能量供应,寿命极长,自带lora模组,无线通信距离远,在需要隐蔽特性的监控或无人值守等长期免维护的场景,特别是无移动网络的环境中有较好的应用前景。
技术特征:
1.一种基于无人预警系统的控制方法,其特征在于:所述方法具体为:
2.根据权利要求1所述的方法,其特征在于,所述无人预警系统包括多个红外预警节点及远程主机;所述多个红外预警节点与远程主机通过lora无线通信组成预警网络;每个红外预警节点均包括光伏板、外部充电口、pmic、充电管理、防倒灌电路、储能电池、buck电路、负载开关1、负载开关2、红外测距模组、mcu和lora模块。
3.根据权利要求2所述的方法,其特征在于,光伏板通过pmic和防倒灌电路连接到储能电池,外部充电口通过充电管理和防倒灌电路连接到储能电池,两个防倒灌电路同时连接到储能电池,实现两种能量输入防倒灌,并对储能电池的充能及后级负载供电;储能电池电压经buck电路降压3.3v,可供红外测距模组、mcu和lora模块供电;buck后级跟负载开关1和负载开关2,并直接连接mcu,负载开关1和负载开关2的导通关断受mcu控制,负载开关1控制红外测距模组供电,负载开关2控制lora模块供电。
4.根据权利要求3所述的方法,其特征在于,在s5中,mcu采集多组距离数据并上传主机,由主机判断当前位置是否合理,若合理,则回传默认距离范围,该距离范围将作为s13的默认距离范围判定依据;若不合理,则回传重测距离指令。
5.根据权利要求3所述的方法,其特征在于,在s8中,mcu由lora信息唤醒后判断lora回传的信息是否为默认距离范围信息,若是,则进入周期性距离测量环节,若否,则回到s2重新发起初始化操作,在该阶段,用户可以调整红外预警节点位置,调整完毕后,通过主机发送采集距离指令。
6.根据权利要求3所述的方法,其特征在于,在s10-s16中,mcu周期性休眠唤醒,进行距离采集与判定,由于休眠期间两个负载开关均关断,红外测距模组和lora模块不耗电,只有mcu休眠功耗,而唤醒后进行数据测量、判定和无线数据传输耗时极短,因此大大的降低了系统整体功耗。
7.根据权利要求3所述的方法,其特征在于,在s15中,预留了一个用户配置通道,当用户完成红外预警节点配置后需要重新调整该节点位置时,可通过挪动红外预警节点,使其测量距离小于预设距离范围,之后在主机端配置模式为初始化回应模式,则主机接收到红外预警节点的预警信息后将不再回应收到信息,将回应初始化信息,红外预警节点将重新回到s2,重新进入初始化配置环节。
技术总结
本发明提出一种基于无人预警系统的控制方法。所述系统包括多个红外预警节点及远程主机,多个红外预警节点与远程主机通过Lora无线通信组成预警网络。通过MCU对负载开关1和负载开关2的导通和关断控制完成预警操作,所述控制方法支持光伏自驱动工作,可长期实现自我能量供应,寿命极长,自带Lora模组,无线通信距离远,在需要隐蔽特性的监控或无人值守等长期免维护的场景,特别是无移动网络的环境中有较好的应用前景。
技术研发人员:李明雪,刘小强,张宇峰
受保护的技术使用者:哈尔滨海微智芯科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!