一种基于图像识别的水库无人巡检系统的制作方法
本发明涉及消防监测领域,具体来说涉及一种基于图像识别的水库无人巡检系统。
背景技术:
1、在传统人工巡查中,只能沿着水库坝体、两岸或者是坐船进行巡查、取证、拍摄,但是由于水库面积广阔导致巡检的时间和周期长,巡检效率低下,还容易发生危险,因此,我们提出一种基于图像识别的水库无人巡检系统。
技术实现思路
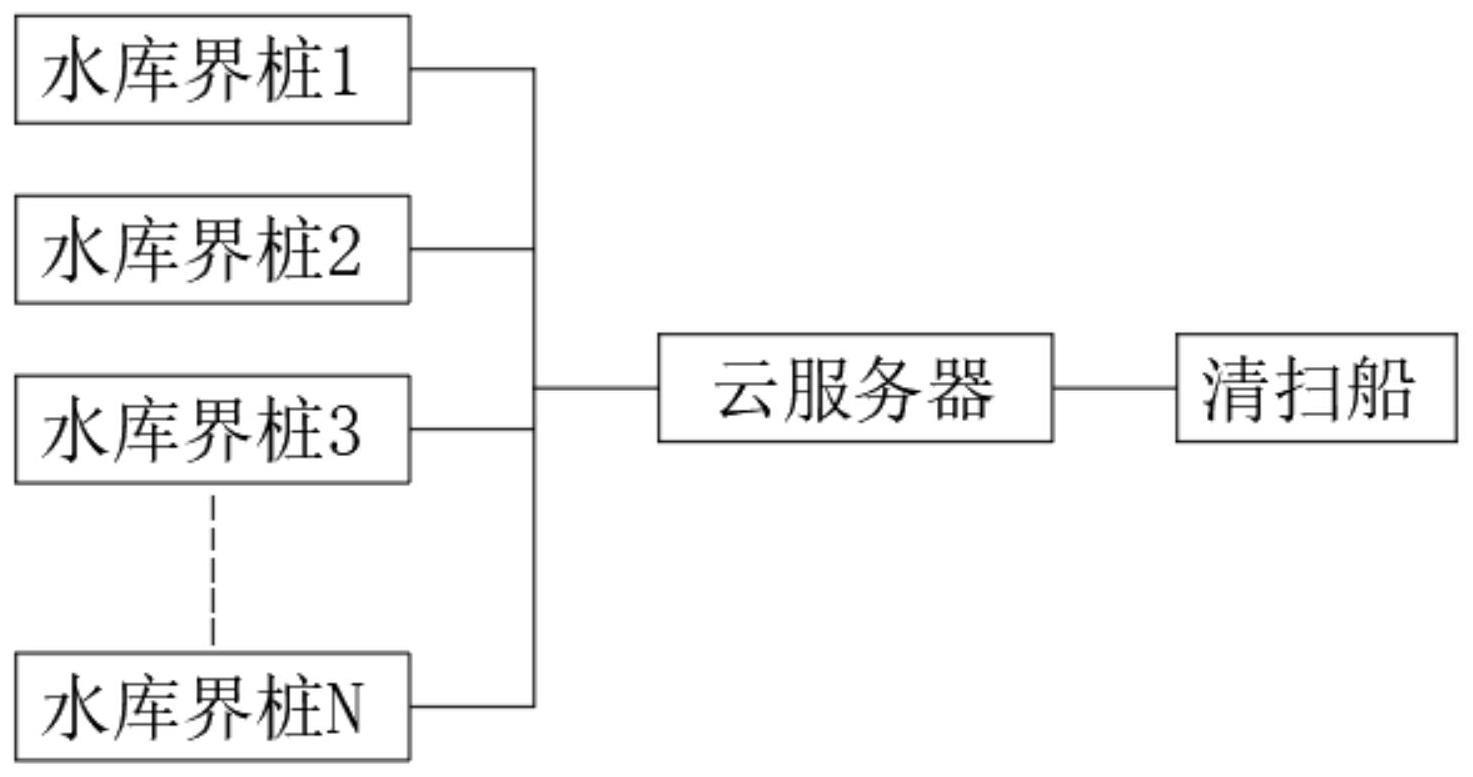
1、为了实现上述目的,本发明提供如下技术方案:一种基于图像识别的水库无人巡检系统,包括:
2、分布在水库周边用于拍摄不同角度水库画面的若干水库界桩;
3、用于接收和处理拍摄画面的云服务器;
4、用于接收和执行云服务器发出的清扫指令的无人清扫船。
5、作为本发明一种优选的技术方案,所述水库界桩上设置有摄像头模块、第一北斗定位模块和第一通讯模块;
6、所述摄像头模块用于拍摄水库画面;
7、所述第一北斗定位模块用于定位水库界桩在地图上的位置;
8、所述第一通讯模块用于传输摄像头模块和第一北斗定位模块所采集的数据。
9、作为本发明一种优选的技术方案,所述云服务器包括第二通讯模块、图像处理模块、图像建模模块和特征识别模块;
10、所述第二通讯模块用于接收第一通讯模块传输的数据,并将该数据发送给图像处理模块;
11、所述图像处理模块用于对拍摄的图像进行预处理,并将预处理后的图像传输给图像建模模块;
12、所述图像建模模块用于对不同角度的画面进行建模,生成水库画面的三模模型,并结合特征识别模块定位污染物的坐标位置;
13、所述特征识别模块用于对拍摄画面中的物体进行分类识别。
14、作为本发明一种优选的技术方案,所述特征识别模块的分类算法采用支持向量机(svm)算法,svm算法的分类模型如下为:
15、f(x)=sign(w·x+b)
16、其中,w和b是模型参数,x是输入特征向量,sign表示符号函数;
17、通过上述svm算法找到最大间隔超平面,使得不同类别数据点到超平面的距离最大化,其过程如下:
18、maxφ(w,b)=1/||w||
19、subject to yi(w·xi+b)≥1,i=1,2,…,n
20、其中,xi是样本特征向量,yi是样本标签,n是样本数量。
21、作为本发明一种优选的技术方案,所述图像建模模块进行三维建模包括以下步骤:
22、s1:图像标定,对拍摄的多张图片进行标定,确定摄像头模块的内参和外参参数;
23、s2:特征匹配,根据图像的特征点进行匹配,形成图像间的对应关系;
24、s3:点云重建,通过多视几何方法将匹配的特征点转化为三维点云数据,得到初始的三维模型;
25、s4:建模和优化,对初始的三维模型进行优化和修正,完善表面纹理信息和进行模型细化;
26、s5:渲染和显示,将优化后的三维模型进行渲染和显示,生成真实感受的三维模型图像。
27、作为本发明一种优选的技术方案,所述无人清扫船上设置有第三通讯模块和第二北斗定位模块;
28、所述第三通讯模块用于接收云服务器的指令,并将该指令传输给移动控制模块;
29、所述第二北斗定位模块用于定位无人清扫船在地图上的位置。
30、作为本发明一种优选的技术方案,所述云服务器还包括路径规划模块,所述路径规划模块能够调用图像建模模块输出的水库画面三维模型、污染物坐标位置以及无人清扫船的位置信息,并根据水库画面三维模型、污染物坐标位置以及无人清扫船的位置信息设定污染物清扫路径和无人清扫船巡回路径。
31、作为本发明一种优选的技术方案,所述无人清扫船上还设置有移动控制模块,所述移动控制模块用于控制无人清扫船的机动部件的运转并根据污染物清扫路径和无人清扫船巡回路径进行移动,所述机动部件包括推进器及转向器。
32、作为本发明一种优选的技术方案,所述图像处理模块对拍摄的图像进行预处理包括对图像的明暗调节、降噪及渲染。
33、在上述技术方案中,本发明提供的一种基于图像识别的水库无人巡检系统,具备以下有益效果:通过设置在水库周围的界桩及安装在界桩上的高清摄像头定时拍摄水面的图片,利用图像处理模对拍摄的图片进行预处理,并由图像建模模块和路径规划模块生成水库画面模型和路径规划,实现了巡检的无人化操作,通过图像识别及物联网技术的有机结合,有效的降低了巡检的人工成本,缩短了巡检周期,同时消除了巡检工作中产生的安全隐患。
技术特征:
1.一种基于图像识别的水库无人巡检系统,其特征在于,包括:
2.根据权利要求1所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述水库界桩上设置有摄像头模块、第一北斗定位模块和第一通讯模块;
3.根据权利要求2所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述云服务器包括第二通讯模块、图像处理模块、图像建模模块和特征识别模块;
4.根据权利要求3所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述特征识别模块的分类算法采用支持向量机(svm)算法,svm算法的分类模型如下为:
5.根据权利要求3所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述图像建模模块进行三维建模包括以下步骤:
6.根据权利要求3所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述无人清扫船上设置有第三通讯模块和第二北斗定位模块;
7.根据权利要求6所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述云服务器还包括路径规划模块;
8.根据权利要求6所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述无人清扫船上还设置有移动控制模块,所述移动控制模块用于控制无人清扫船的机动部件的运转并根据污染物清扫路径和无人清扫船巡回路径进行移动,所述机动部件包括推进器及转向器。
9.根据权利要求3所述的一种基于图像识别的水库无人巡检系统,其特征在于,所述图像处理模块对拍摄的图像进行预处理包括对图像的明暗调节、降噪及渲染。
技术总结
本发明公开了一种基于图像识别的水库无人巡检系统,包括分布在水库周边用于拍摄不同角度水库画面的若干水库界桩、用于接收和处理拍摄画面的云服务器、用于接收和执行云服务器发出的清扫指令的无人清扫船。该发明提供的基于图像识别的水库无人巡检系统,通过设置在水库周围的界桩及安装在界桩上的高清摄像头定时拍摄水面的图片,利用图像处理模对拍摄的图片进行预处理,并由图像建模模块和路径规划模块生成水库画面模型和路径规划,实现了巡检的无人化操作,通过图像识别及物联网技术的有机结合,有效的降低了巡检的人工成本,缩短了巡检周期,同时消除了巡检工作中产生的安全隐患。
技术研发人员:熊齐燃
受保护的技术使用者:南京风倪科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!