全景图像采集系统及具有该图像采集系统的智能巡检系统的制作方法
本发明涉及智能巡检,尤其是涉及一种全景图像采集系统及具有该图像采集系统的智能巡检系统。
背景技术:
1、随着科学技术的不断发展,智能巡检逐步走进石油化工行业。据统计,化工厂每年都有不少化工事故的发生,引起严重的人员伤亡和国家经济损失。因此化工厂采用智能巡检方法,由机器人代替真人来巡检各管道的跑冒滴漏现象,不仅可以减少人力成本的支出,最重要的是可以保障人员的安全。
2、经检索现有技术,中国专利cn115949851a公开了一种燃气泄漏智能巡检机器人,包括巡检机器车体和设置在车体上方的旋转升降巡检单元,其中旋转升降巡检单元上安装有检测云台,检测云台上设有一台摄像机,旋转升降巡检单元可以控制云台的升降和旋转,随着机器人的移动,实现对燃气管道的全方位采集图像。然而,巡检机器人上仅仅安装一个云台相机,存在以下问题:首先,由于相机存在边缘畸变效应,仅由一台云台相机进行摄像,无法保证现场每个区域上单位面积的像素分辨率保持一致,系统对故障问题的识别可能受到影响;其次,由于一台云台相机的摄像视野有限,在机器人运动过程中,需要对云台位置进行全方位的切换,可能会出现区域漏检现象,同时云台在快速切换过程中,容易导致图像模糊而出现无法识别的区域,同样会导致区域漏检问题的发生。
3、因此,为解决上述现有技术问题,需要合理的布置相机,形成一种新的图像采集系统来全方位采集现场画面,从而提高智能巡检系统对故障区域的捕捉能力和识别率。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种全景图像采集系统及具有该图像采集系统的智能巡检系统。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的一个方面,提供了一种全景图像采集系统,该全景图像采集系统安装在智能巡检系统的机器人本体上,所述全景图像采集系统包括多组摄像设备,所述全景图像采集系统还包括布置于机器人本体上至少两个方位的图像采集子系统,每个所述的图像采集子系统分别安装一组摄像设备;
4、当所述智能巡检系统启动时,所述机器人本体搭载全景图像采集系统匀速移动,进行化工厂全方位的智能巡检。
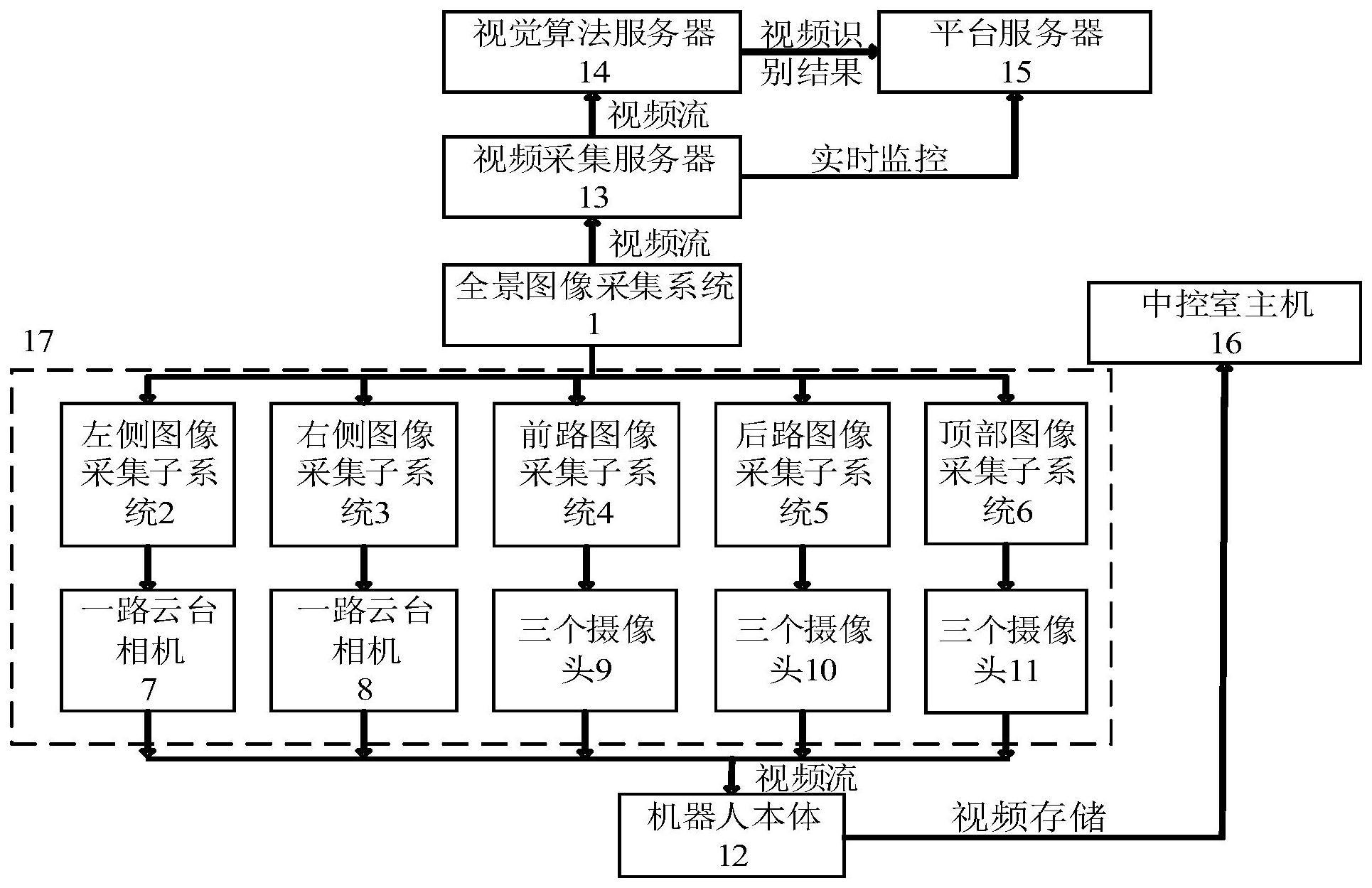
5、作为优选的技术方案,所述图像采集子系统包括对应布置于机器人本体的左侧、右侧、前方、后方和顶部的左侧图像采集子系统、右侧图像采集子系统、前路图像采集子系统、后路图像采集子系统和顶部图像采集子系统。
6、作为优选的技术方案,所述多组摄像设备包括两路云台相机和三组摄像机,所述的两路云台相机分别安装于左侧图像采集子系统和右侧图像采集子系统上,所述的三组摄像机分别安装于前路图像采集子系统、后路图像采集子系统和顶部图像采集子系统上。
7、作为优选的技术方案,所述三组摄像机分别包括三个摄像头,所述三个摄像头分别布置于各自图像采集子系统朝向上的左前方、正前方和右前方。
8、作为优选的技术方案,所述多组摄像设备为采用防爆结构和防爆外壳制作的摄像设备。
9、根据本发明的另一个方面,提供了一种具有全景图像采集系统的智能巡检系统,该智能巡检系统包括机器人本体、视频采集服务器、视觉算法服务器、平台服务器和远程的中控室主机,所述智能巡检系统还包括所述的全景图像采集系统;
10、所述全景图像采集系统将采集的视频流信息存储于机器人本体内并传输给视频采集服务器,所述视频采集服务器将视频流信息分别传输给视觉算法服务器和平台服务器,所述视觉算法服务器用于识别故障信息和标注故障画面并将标注的故障画面传输给平台服务器,所述平台服务器用于实时监控现场、接收和查看故障信息并发出故障警报,所述中控室主机用于远程调取机器人本体存储的视频流信息进行实时监控。
11、作为优选的技术方案,所述机器人本体上设有升降机械臂,所述升降机械臂上安装有顶部图像子系统。
12、作为优选的技术方案,所述升降机械臂相对于地面的升降高度为0~2m。
13、作为优选的技术方案,所述机器人本体按照设定速度进行匀速移动。
14、作为优选的技术方案,所述智能巡检系统在前路图像采集子系统上设置用于导航和定位机器人本体的导航模块。
15、与现有技术相比,本发明具有以下技术优点:
16、1.本发明提出的全景图像采集系统在左、右、前、后和顶部五个方位都设有摄像头,可以确保现场每个区域都同时进行巡检,并且可以使单位面积的像素分辨率保持一致,不会影响故障问题的识别;同时,图像采集系统在左侧和右侧都各设置一个云台相机,可以在云台不切换的情况下进行全方位信息采集,防止了因云台切换导致的图像模糊问题,同时也排除了故障漏检问题。
17、2.本发明提出的智能巡检系统能够应用在危险化工厂内全面排查故障,其中的摄像设备均采用防爆外壳的形式保护起来,且摄像头本身也按照防爆要求来设计,具有双重防爆功能,能够适用于厂房现状;机器人本体增设机械手臂安装顶部图像采集子系统,该机械手臂相对于地面的升降高度为0~2m,能够使其上搭载的三个摄像头对化工厂顶部的管路进行清晰、全面的排查;前路图像采集子系统还可以安装导航模块,用于辅助智能巡检系统对机器人本体的导航和定位;智能巡检系统的机器人本体搭载全景图像采集系统并按照设定的速度进行匀速移动,能够全方位平稳的采集厂房画面,巡检是否有跑冒滴漏情况,若有异常情况,会通过图像识别算法识别出异常点,并在画面中标记出异常点传到平台服务器,由平台服务器及时发出报警提示。该智能巡检系统节约了传统真人巡检的人力、物力、财力等资源,同时保证了工厂人员的安全,提高了巡检的效率和安全性。
技术特征:
1.一种全景图像采集系统,该全景图像采集系统(1)安装在智能巡检系统的机器人本体(12)上,所述全景图像采集系统(1)包括多组摄像设备,其特征在于,所述全景图像采集系统(1)还包括布置于机器人本体(12)上至少两个方位的图像采集子系统,每个所述的图像采集子系统分别安装一组摄像设备;
2.根据权利要求1所述的一种全景图像采集系统,其特征在于,所述图像采集子系统包括对应布置于机器人本体(12)的左侧、右侧、前方、后方和顶部的左侧图像采集子系统(2)、右侧图像采集子系统(3)、前路图像采集子系统(4)、后路图像采集子系统(5)和顶部图像采集子系统(6)。
3.根据权利要求1所述的一种全景图像采集系统,其特征在于,所述多组摄像设备包括两路云台相机和三组摄像机,所述的两路云台相机分别安装于左侧图像采集子系统(2)和右侧图像采集子系统(3)上,所述的三组摄像机分别安装于前路图像采集子系统(4)、后路图像采集子系统(5)和顶部图像采集子系统(6)上。
4.根据权利要求3所述的一种全景图像采集系统,其特征在于,所述三组摄像机分别包括三个摄像头,所述三个摄像头分别布置于各自图像采集子系统朝向上的左前方、正前方和右前方。
5.根据权利要求1所述的一种全景图像采集系统,其特征在于,所述多组摄像设备为采用防爆结构和防爆外壳制作的摄像设备。
6.一种具有全景图像采集系统的智能巡检系统,该智能巡检系统包括机器人本体(12)、视频采集服务器(13)、视觉算法服务器(14)、平台服务器(15)和远程的中控室主机(16),其特征在于,所述智能巡检系统还包括权利要求1-5任一所述的全景图像采集系统;
7.根据权利要求6所述的智能巡检系统,其特征在于,所述机器人本体(12)上设有升降机械臂,所述升降机械臂上安装有顶部图像子系统(6)。
8.根据权利要求7所述的智能巡检系统,其特征在于,所述升降机械臂相对于地面的升降高度为0~2m。
9.根据权利要求6所述的智能巡检系统,其特征在于,所述机器人本体(12)按照设定速度进行匀速移动。
10.根据权利要求6所述的智能巡检系统,其特征在于,所述智能巡检系统在前路图像采集子系统(4)上设置用于导航和定位机器人本体(12)的导航模块。
技术总结
本发明涉及一种全景图像采集系统及具有该全景图像采集系统的智能巡检系统,该全景图像采集系统安装在智能巡检系统的机器人本体上,所述全景图像采集系统包括多组摄像设备,所述全景图像采集系统还包括布置于机器人本体上至少两个方位的图像采集子系统,每个所述的图像采集子系统分别安装一组摄像设备;当所述智能巡检系统启动时,所述机器人本体搭载全景图像采集系统匀速移动,进行化工厂全方位的智能巡检。与现有技术相比,本发明具有不需切换云台即可全方位采集视频信息、防止故障漏检等优点。
技术研发人员:王玉杰,王丽雪,李俊
受保护的技术使用者:上海华谊信息技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!