用于叉车的无线摄像自动控制方法及系统与流程
本申请涉及叉车无线摄像控制领域,具体涉及用于叉车的无线摄像自动控制方法及系统。
背景技术:
1、叉车主要用于货物的取放,仓库环境光线较差且环境复杂,叉车驾驶员在驾驶叉车时,货物会挡到驾驶员的视线,或货物放置位置较高,使驾驶员看不到货物所要放置的位置,导致货物碰撞损坏问题;或者在驾驶的过程中出现一些事故,而导致纠纷。因此,大多叉车都通过安装无线摄像头来辅助相关工作人员,叉车无线监控摄像头可以起到协助工作人员安全放置货物和记录视频的作用,可通过叉车摄像头的安装调节增加驾驶可视视线,避免盲点和事故的发生,提高驾驶安全性。
2、但是,当叉车无线摄像头的相机参数设定不佳或者参数固定时,针对仓库不同的环境,叉车无线摄像头采集的图像数据将会出现质量不佳信息不够准确的问题,导致叉车驾驶员在进行货物取放时出现较大误差,严重时将导致驾驶过程中出现安全事故问题。
3、综上所述,为提高叉车无线摄像头对于驾驶员的辅助作用,保证叉车无线摄像头的图像采集效果,为叉车驾驶员提供较为准确可靠的信息,本发明将通过环境光照强度以及环境特征对叉车无线摄像头的摄像曝光时长进行自适应调控,以实现对叉车无线摄像头的自动控制,能够保证在不同亮度信息环境下采集的视频图像数据不会出现过曝、欠曝等质量问题。
技术实现思路
1、为了解决上述技术问题,本发明提供用于叉车的无线摄像自动控制方法及系统,以解决现有的问题。
2、本发明的用于叉车的无线摄像自动控制方法及系统采用如下技术方案:
3、本发明一个实施例提供了面向智能戒指的手势视觉交互方法,该方法包括以下步骤:
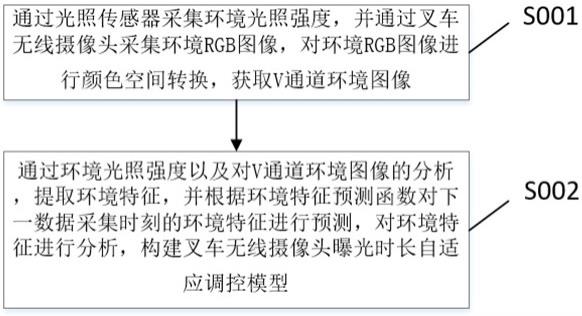
4、获取环境光照强度;通过叉车无线摄像头获取环境rgb图像;
5、将环境rgb图像转换成环境hsv图像,获取v通道环境图像;
6、根据v通道环境图像中所有像素点亮度值的均值得到v通道环境图像亮度值;
7、根据环境光照强度和v通道环境图像亮度值得到环境特征;
8、根据历史数据采集时刻的环境特征通过回归拟合得到环境特征预测函数;
9、根据当前数据采集时刻叉车运行方向角与下一数据采集时刻叉车运行方向角的角度差值得到叉车运行变化量;
10、当叉车运行变化量低于变化量阈值时,根据当前数据采集时刻及之前数个数据采集时刻的环境特征结合环境特征预测函数得到下一数据采集时刻的预测环境特征;
11、当叉车运行变化量高于变化量阈值时,根据下一数据采集时刻叉车运行方向以及当前v通道环境图像像素点的亮度值得到当前v通道环境图像的优化亮度值;根据当前环境光照强度和当前v通道环境图像的优化亮度值得到当前数据采集时刻的优化环境特征;根据当前数据采集时刻的优化环境特征以及当前数据采集时刻之前的数个数据采集时刻的环境特征结合环境特征预测模型得到下一数据采集时刻的预测环境特征;
12、根据当前数据采集时刻的环境特征与下一数据采集时刻的预测环境特征的差值绝对值得到环境特征差异值;
13、当环境特征差异值低于环境特征差异阈值时,根据当前数据采集时刻叉车无线摄像头的曝光时长得到下一数据采集时刻的自适应曝光时长;
14、当环境特征差异值高于环境特征差异阈值时,根据环境特征差异值、当前数据采集时刻叉车无线摄像头的曝光时长以及下一数据采集时刻的预测环境特征得到下一数据采集时刻叉车无线摄像头的自适应曝光时长;
15、根据初始环境光照强度以及初始v通道环境图像得到初始环境特征;根据初始环境特征得到初始曝光时长;根据初始曝光时长以及叉车无线摄像头的自适应曝光时长实现叉车无线摄像的自动控制。
16、优选的,所述根据环境光照强度和v通道环境图像亮度值得到环境特征,表达式为:
17、
18、式中,e为自然常数,e为环境特征,i为环境光照强度,l为v通道环境图像中所有像素点的亮度均值,为相乘操作。
19、优选的,所述根据下一数据采集时刻叉车运行路线方向以及当前v通道环境图像像素点的亮度值得到当前v通道环境图像的优化亮度值,包括的具体步骤为:过当前v通道环境图像的中心点做竖直垂线,将当前v通道环境图像分为左右两部分,将偏向下一数据采集时刻叉车运行路线方向的一部分的像素点的亮度值均值作为当前v通道环境图像的优化亮度值。
20、优选的,所述根据当前环境光照强度和当前v通道环境图像的优化亮度值得到当前数据采集时刻的优化环境特征,表达式为:
21、
22、式中,e为自然常数,为优化环境特征,i为环境光照强度,为v通道环境图像的优化亮度值,为相乘操作。
23、优选的,所述根据当前数据采集时刻叉车无线摄像头的曝光时长得到下一数据采集时刻的自适应曝光时长,具体为:将下一数据采集时刻叉车无线摄像头的自适应曝光时长设置为与当前数据采集时刻叉车无线摄像头曝光时长相同。
24、优选的,所述根据环境特征差异值、当前数据采集时刻叉车无线摄像头的曝光时长以及下一数据采集时刻的预测环境特征得到下一数据采集时刻叉车无线摄像头的自适应曝光时长,表达式为:
25、
26、式中,分别为数据采集时刻i+1、数据采集时刻i对应的叉车无线摄像头曝光时长,分别为数据采集时刻i+1、数据采集时刻i的环境特征,为环境特征差异值,为调控系数,为相乘操作。
27、优选的,所述根据初始环境特征得到初始曝光时长,表达式为:
28、
29、式中,为初始曝光时长,为限定系数,为避免分母为零的参数,为初始环境特征,为相乘操作。
30、第二方面,本发明提供了用于叉车的无线摄像自动控制系统,包括处理器和存储器,上述处理器用于处理存储在上述存储器中的指令,以实现上述的用于叉车的无线摄像自动控制方法。
31、本发明至少具有如下有益效果:
32、本发明通过环境光照强度传感器以及图像信息对环境综合亮度信息进行准确提取,避免仅通过光照传感器检测环境光照强度时距离远精度差、环境适应性差等问题,同时,本发明通过实际环境亮度信息对叉车无线摄像头的曝光时长进行自适应调控,解决了叉车无线摄像头固定曝光参数在不同环境亮度下进行图像采集时出现的过曝、欠曝等图像质量问题,能够为叉车驾驶员提供准确可靠的信息;
33、本发明通过对下一数据采集时刻的环境特征进行自适应预测,解决了由于叉车运行路线转换过大导致的环境特征预测精度不高的问题,进一步,通过预测的环境特征可对下一数据采集时刻的叉车无线摄像头曝光时长进行自适应调控,能够降低叉车无线摄像头参数调节过程中的功耗损失,避免叉车无线摄像头参数调整过于频繁导致无线摄像头功耗增加的情况。
技术特征:
1.用于叉车的无线摄像自动控制方法,其特征在于,该方法包括以下步骤:
2.如权利要求1所述的用于叉车的无线摄像自动控制方法,其特征在于,所述根据环境光照强度和v通道环境图像亮度值得到环境特征,表达式为:
3.如权利要求1所述的用于叉车的无线摄像自动控制方法,其特征在于,所述根据下一数据采集时刻叉车运行方向以及当前v通道环境图像像素点的亮度值得到当前v通道环境图像的优化亮度值,包括的具体步骤为:过当前v通道环境图像的中心点做竖直垂线,将当前v通道环境图像分为左右两部分,将偏向下一数据采集时刻叉车运行路线方向的一部分的像素点的亮度值均值作为当前v通道环境图像的优化亮度值。
4.如权利要求1所述的用于叉车的无线摄像自动控制方法,其特征在于,所述根据当前环境光照强度和当前v通道环境图像的优化亮度值得到当前数据采集时刻的优化环境特征,表达式为:
5.如权利要求1所述的用于叉车的无线摄像自动控制方法,其特征在于,所述根据当前数据采集时刻叉车无线摄像头的曝光时长得到下一数据采集时刻的自适应曝光时长,具体为:将下一数据采集时刻叉车无线摄像头的自适应曝光时长设置为与当前数据采集时刻叉车无线摄像头曝光时长相同。
6.如权利要求1所述的用于叉车的无线摄像自动控制方法,其特征在于,所述根据环境特征差异值、当前数据采集时刻叉车无线摄像头的曝光时长以及下一数据采集时刻的预测环境特征得到下一数据采集时刻叉车无线摄像头的自适应曝光时长,表达式为:
7.如权利要求1所述的用于叉车的无线摄像自动控制方法,其特征在于,所述根据初始环境特征得到初始曝光时长,表达式为:
8.用于叉车的无线摄像自动控制系统,其特征在于,包括处理器和存储器,所述处理器用于处理存储在所述存储器中的指令以实现所述权利要求1-7中任一项所述的用于叉车的无线摄像自动控制方法。
技术总结
本发明涉及叉车无线摄像控制领域,具体涉及用于叉车的无线摄像自动控制方法及系统,获取环境光照强度以及V通道环境图像;根据环境光照强度和V通道环境图像亮度值计算环境特征;通过回归拟合得到环境特征预测函数;根据前后数据采集时刻叉车运行路线方向角的差值得到叉车运行路线变化量;根据叉车运行路线变化量以及环境特征预测函数自适应得到下一数据采集时刻的预测环境特征;根据环境特征差异值、当前数据采集时刻叉车无线摄像头的曝光时长以及下一时刻预测环境特征得到下一时刻叉车无线摄像头的自适应曝光时长。从而实现叉车无线摄像的自适应调控,提高叉车无线摄像自动调控效率。
技术研发人员:唐吉斌,黄龙
受保护的技术使用者:深圳市思拓通信系统有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!