一种灾害场景下改进的地面传感器节点聚类算法
本发明涉及无人机辅助应急通信,尤其涉及一种灾害场景下改进的地面传感器节点聚类算法。
背景技术:
1、
2、灾后应急场景具有时间突发性、地点复杂性以及业务紧急性的特点,在这种灾害场景的紧急情况下,正常的通信短时间内很难恢复,面对突发型自然灾害,应急决策体制的建立就尤为重要,应急决策体制能够在自然灾害发生的第一时间建立应急救援机制,最大限度减少应急区域人员的伤亡和经济损失,而应急决策体制的成功运转则离不开应急通信系统的建立;
3、为防范化解重特大安全风险,健全公共安全体系,整合优化应急力量和资源,2019年,应急管理部发布了“应急管理信息化发展战略规划框架”,其中要求整合无人机等空基网络资源,实现对灾害事故易发多发频发区域全方位、立体化、无盲区的灾情监测与通信覆盖;
4、在灾害场景下,无人机辅助应急通信技术时,主要使用多旋翼无人机群搭载基站部署在地面无线传感器节点上方,对节点持有的灾害信息进行收集。
5、现有技术,在基站无人机部署研究中,仅对地面无线传感器节点进行简单的区域划分,或使用传统k-means算法对地面进行聚类,
6、k-means算法最早在1957年提出,在1967年被命名,是一种通过选定类别中心点作为划分依据、以数据点到类别中心点之间的距离大小作为分类的判断标准、以最大化划分的类内紧致程度作为目标,不断迭代更新直至类别指派不再发生变化的聚类方法;
7、现有技术中,手肘法是k-means算法中确定聚类数k的常用方法,但手肘法存在肘部拐点不明显的缺点,需要人为肉眼观察折线确定最佳聚类数量,具有一定主观性;
8、现有技术中,传统的k-means算法中的聚类数量需要根据经验人为给定,但在实际工程中,特别是在灾害场景下,存在很多无法根据先验知识给定聚类数量的情况,现有技术无法自动寻找初始聚类数量,因此现有技术的原始的聚类方法不能满足灾害场景下对地面无线传感器节点的聚类需求;
9、现有技术中,传统的k-means算法,初始聚类中心随机选取的方式使得聚类过程的收敛速度无法保证,极易陷入局部最优解,且无法自动跳出,从而无法找到更为优异的聚类结果;
10、现有技术中,聚类数量和簇心初始化的是随机进行初始的,而聚类数量和簇心初始化的影响波动极大,特别是在灾害场景下,这使得聚类质量不稳定性增加;并且现有的传统k-means算法中,并没有针对灾害场景做具体的约束,聚类效果差。
11、因此,本领域技术人员致力于开发一种灾害场景下改进的地面传感器节点聚类算法,旨在解决现有技术中存在的缺陷问题。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是目前现有技术中,现有算法还需要人为肉眼观察折线确定最佳聚类数量,具有主观性;并且聚类数量需要根据经验人为给定,在灾害场景下,存在很多无法根据先验知识给定聚类数量的情况,现有技术无法自动寻找初始聚类数量,因此现有技术的原始的聚类方法不能满足灾害场景下的聚类需求;初始聚类中心随机选取的方式使得聚类过程的收敛速度无法保证,极易陷入局部最优解,且无法自动跳出,从而无法找到更为优异的聚类结果;现有技术中,聚类数量和簇心初始化的是随机进行初始的,而聚类数量和簇心初始化的影响波动极大,特别是在灾害场景下,这使得聚类质量不稳定性增加;并且现有的传统k-means算法中,并没有针对灾害场景做具体的约束,聚类效果差。
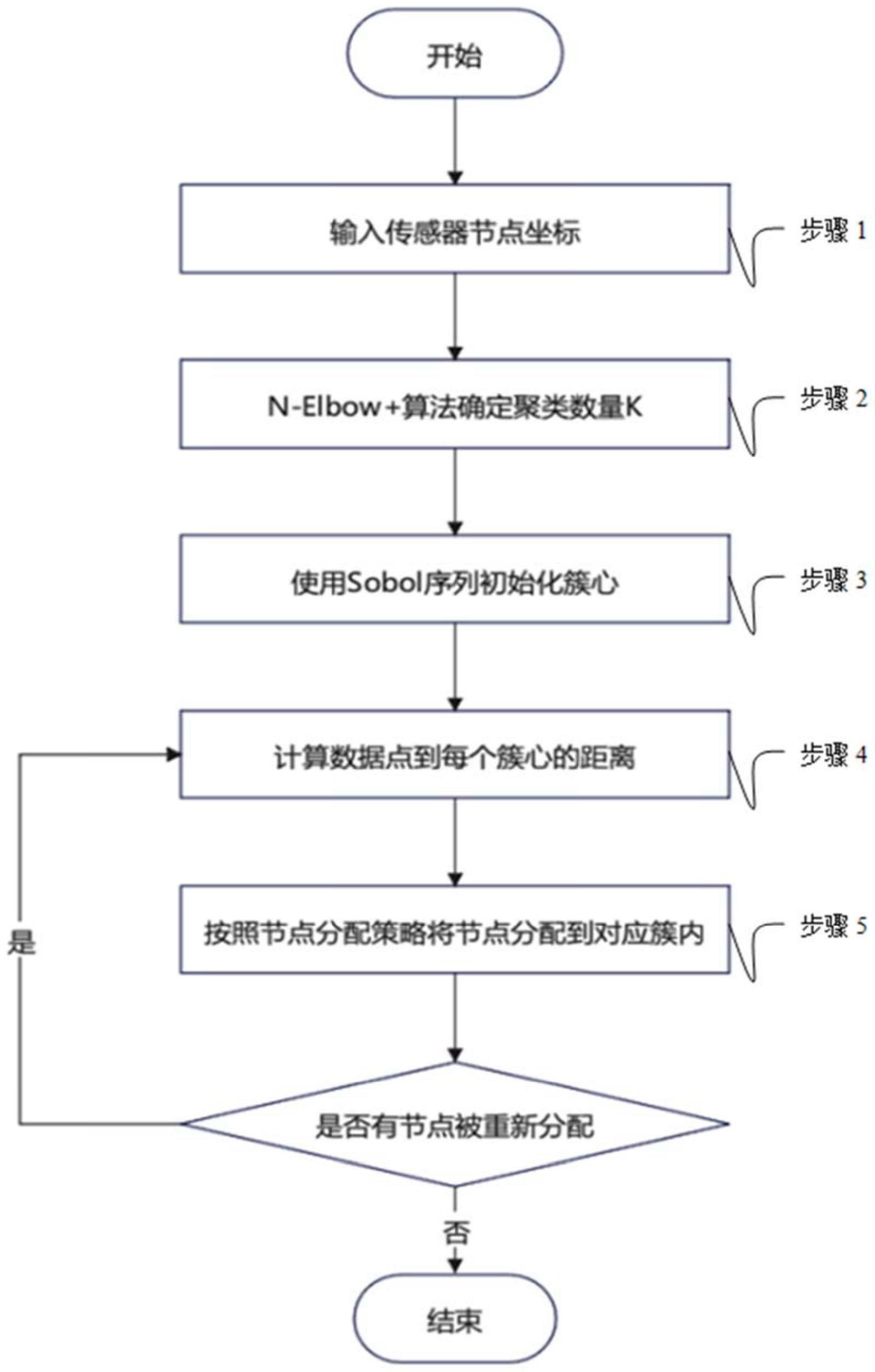
2、为实现上述目的,本发明一种灾害场景下改进的地面传感器节点聚类算法,包括如下步骤:
3、步骤1、输入传感器节点坐标;
4、步骤2、n-elbow+算法确定聚类数量k;
5、步骤3、使用sobol序列初始化簇心;
6、步骤4、计算数据点到每个簇心的距离;
7、步骤5、按照节点分配策略将节点分配到对应的簇内;
8、所述步骤1中的传感器节点坐标,是灾害场景下地面留存的节点;
9、所述步骤1传感器节点坐标的输入,采用自动节点坐标输入和手动坐标节点输入相结合的方式;
10、步骤2、使用n-elbow+算法确定聚类数量k;
11、所述步骤2在对地面传感器聚类过程中,选择使用基于误差平方和(sum ofsquared error,sse)的手肘法;以原始手肘法所达到的聚类质量为下限,按照实际聚类需要,使其可自动输出等同于或高于该质量下限的类别数量k;
12、所述步骤2、首先通过灾区半径和无人机覆盖半径初步计算类别数量的最小值kmin,作为决定n-elbow+算法迭代次数的限制条件,公式如下:
13、
14、式中:为向上取整符号,只要该符号内的数字后面有小数就取前面的整数加1作为计算结果;rdisa为灾区受损基站的覆盖半径,rbu_为每架基站无人机最大覆盖半径;
15、所述步骤2中的n-elbow+算法,在进行迭代时,需要计算区间内k值对应的sse、区间首尾k值与其对应的sse值确定的直线、以上二者的差值,寻找最大差值对应的k值,将其作为本次迭代区间内找到的最佳类别数量自动输出,即完成一次迭代任务;
16、步骤3、使用sobol序列初始化簇心;
17、所述步骤3为采用低差异sobol序列用于聚类中心初始化;
18、所述步骤3采用的低差异性序列,使其自身分布更加均匀,减少了簇心更新迭代次数,使得算法自身的收敛速度加快;
19、所述步骤3中,所采用的sobol序列,随着簇心数量的增加,生成的簇心不仅均匀而且密度增大,由于地面节点服从随机分布,低差异sobol序列生成的簇心避免了离群和聚集的偶然性,具有更快的收敛速度;
20、所述步骤3中,低差异sobol序列中样本点的广泛分布,增加了初始簇心对全局空间的利用率;
21、步骤4、计算数据点到每个簇心的距离;
22、所述步骤4计算数据点到簇心之间的距离,即传感器节点坐标与簇心坐标之间的距离;
23、所述步骤4中,计算数据点到每个簇心的距离时,rsse仅在sse每个平方项前乘了等级因子,因此相同条件下,在令rsse和sse的导数为零求解二者的最小值时,所得到的簇心坐标均为每一类中所有点的均值点;
24、步骤5、按照节点分配策略将节点分配到对应的簇内;
25、所述步骤5中,对于每个簇点的分配策略不做改变,仅改进聚类有效性评价指标,不会使聚类结果中各个类别随其包含节点携带信息的重要等级发生变化;
26、所述步骤5在将节点分配到簇内时,加入工程约束;设定最大等级参数,在每一次节点分配结束后,约束每一簇内节点携带信息的重要等级之和不超过等级最大参数;
27、所述步骤5中,若某簇所含节点的信息重要等级之和超过了设定最大等级参数,则按照节点到簇心距离由大到小顺序,依次将远处节点到簇心的距离设置为无穷大并存储,从而使得该节点数据被该簇心拒绝,重复操作,直到该簇内剩余节点的信息重要等级之和不再超过设定最大等级参数,这样被该簇心拒绝的节点就可以选择与其距离次近的簇心建立关联;
28、所述步骤5中,按照节点分配策略进行分配时,若有节点需要重新分配,则返回至步骤4,再次计算数据点到每个簇心的距离;
29、进一步地,所述步骤2中,所述算法迭代至输出的k值满足工程需要即停止,也可以根据实际使用情况适当减少或增加迭代次数;
30、进一步地,所述步骤2中,能基于信息重要等级对聚类有效性进行指标改进;聚类有效性指标sse定义如下:
31、
32、上式中:为第ci簇的簇心坐标,xj表示中第ci簇内第j个节点的坐标;
33、进一步地,sse可以基于实际工程需要,在计算sse值时融入节点所持有信息的重要等级,改进的rsse将信息优先级融入到sse中,定义如下:
34、
35、式中:rj为第ci簇中第j个节点携带信息的重要等级。
36、采用以上方案,本发明公开的灾害场景下改进的地面传感器节点聚类算法,具有以下优点:
37、(1)本发明的灾害场景下改进的地面传感器节点聚类算法,可以按工程需求自动获取类别数量k,减轻了人为指定k值的偶然性对聚类结果产生的影响;同时,提高了聚类质量,使得聚类有效性指标sse和rsse分别降低了19.93%和12.28%;
38、(2)本发明的灾害场景下改进的地面传感器节点聚类算法,采用sobol序列初始化,使其自身分布更加均匀,减少了簇心更新迭代次数,使得算法自身的收敛速度加快;不易陷入局部最优解;
39、(3)本发明的灾害场景下改进的地面传感器节点聚类算法,针对灾害场景下的应用做了针对性的优化,可以输入相关工程聚类需求,进行特定的计算;极大增加了聚类质量的稳定性;本发明算法,具有更高的鲁棒性,可以提高k-means聚类方法对地面存留传感器节点的聚类质量,在满足需求的情况下最小化基站无人机的数量,提高基站无人机的利用率及其对节点覆盖率。
40、综上所述,本发明公开的灾害场景下改进的地面传感器节点聚类算法,减轻了人为指定k值的偶然性对聚类结果产生的影响,提高了聚类质量;采用sobol序列初始化,减少了簇心更新迭代次数,使得算法自身的收敛速度加快;不易陷入局部最优解;在灾害场景下的应用做了针对性的优化,可以输入相关工程聚类需求;具有更高的鲁棒性,可以提高k-means聚类方法对地面存留传感器节点的聚类质量。
41、以下将结合具体实施方式对本发明的构思、具体技术方案及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
- 还没有人留言评论。精彩留言会获得点赞!