本申请涉及船舶,尤其是一种面向极限工况的船舶应急通信装置及船舶。
背景技术:
1、船舶在海洋中航行时,很容易遇到诸如台风、热带风暴、飓风、海啸等恶劣海况,当船舶在海况下航行时容易发生失稳的现象,导致船舶倾覆甚至破裂。因此当船舶处于恶劣海况下时,应当定时向岸上监控台发送自身的航行相关数据,使得岸上监控台可以监控船舶的航行过程以进行安全管理,并及时开展抢险救援工作。
2、但是当船舶在恶劣海况中航行时很容易进入极限工况,这时船舶将丧失动力和电力,导致船舶搭载的通信装置断电而无法与岸上监控台进行通信,导致船舶失联,影响船舶安全性。
技术实现思路
1、本申请人针对上述问题及技术需求,提出了一种面向极限工况的船舶应急通信装置及船舶,从而实现船舶在极限工况下的应急通信,保障船舶航行的安全性。本申请的技术方案如下:
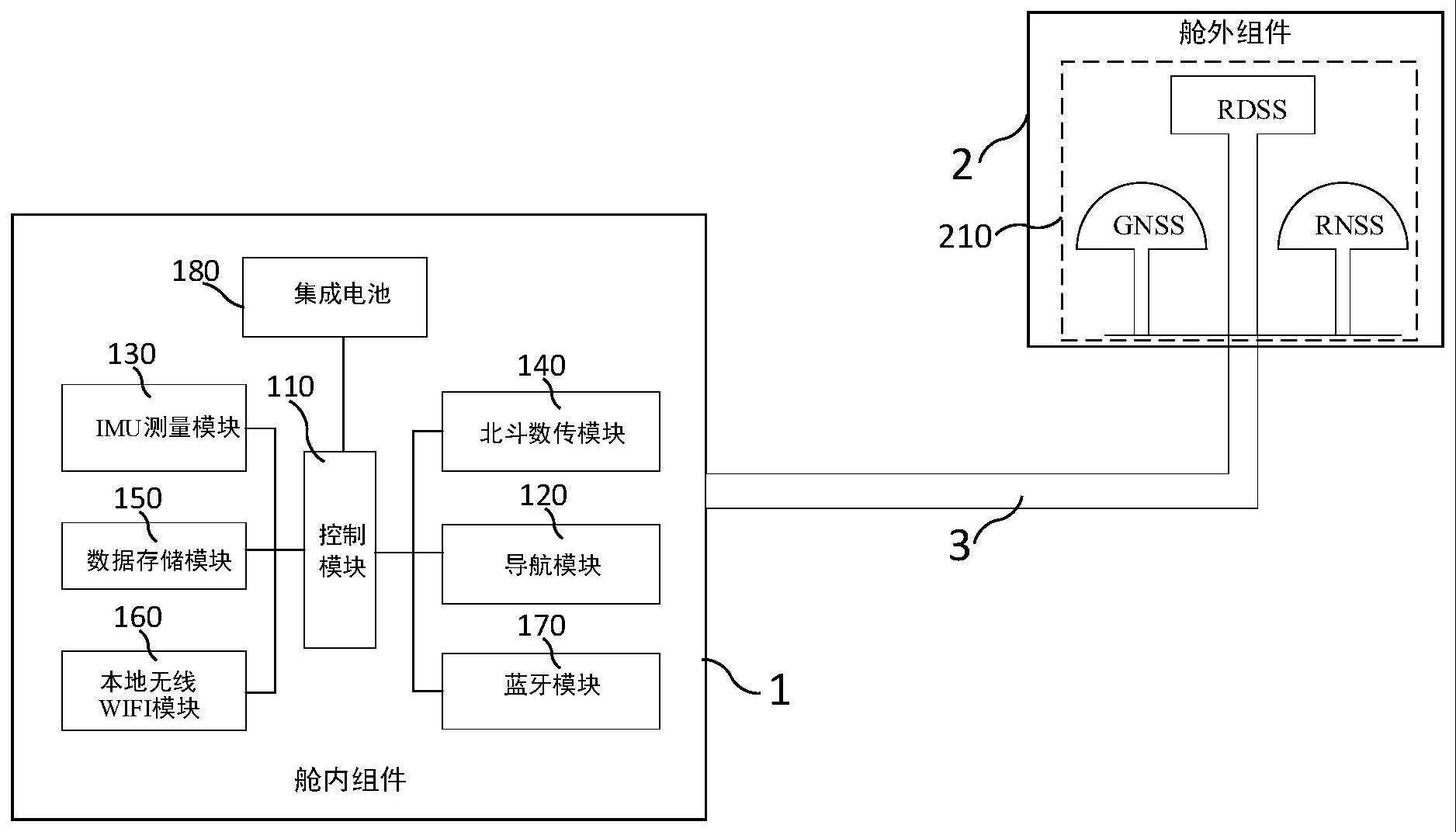
2、第一个方面,本申请提供了一种面向极限工况的船舶应急通信装置,包括:舱内组件和舱外组件,所述舱内组件布设在所述船舶的船舱内,所述舱外组件布设在所述船舶的船舱外;
3、所述舱内组件包括控制模块及其连接的导航模块、imu测量模块、北斗数传模块、数据存储模块以及集成电池;所述舱外组件包括天线组件,所述北斗数传模块和所述导航模块通过复合缆与所述天线组件通信连接;所述集成电池用于当所述船舶进入极限工况后,对所述舱内组件和所述舱外组件进行应急供电;
4、所述控制模块通过所述导航模块获取所述船舶的位置信息、以及通过所述imu测量模块采样所述船舶的运动状态数据;所述控制模块根据任意两个通信时刻之间采样到的所有运动状态数据统计得到所述船舶的浮态稳性结果,并根据北斗短报文的通信协议生成携带所述位置信息和所述浮态稳性结果的短报文数据,以使得通过所述北斗数传模块将所述短报文数据发送至岸上监控台。
5、在一个可能的实现方式中,所述运动状态数据包括:所述船舶的横摇角度、横摇角速度和横摇角加速度;
6、所述浮态稳性结果包括:所述船舶的峰值振幅、失稳评估结果和稳性裕度指数;
7、所述短报文数据中包括峰值振幅字段、预警级别字段和稳性裕度指数字段,所述峰值振幅字段携带峰值振幅相关的信息,所述预警级别字段携带失稳评估结果相关的信息,所述稳性裕度指数字段携带稳性裕度指数相关的信息。
8、在一个可能的实现方式中,所述控制模块包括:
9、横摇角度频率谱获取模块,用于获取当前通信时刻及上一个通信时刻之间采样到的横摇角度时间序列,并计算所述横摇角度时间序列的频率谱得到横摇角度频率谱;
10、峰值振幅获取模块,用于提取所述横摇角度频率谱的能量峰值点对应在横摇角度时间序列中的幅值得到所述船舶的峰值振幅。
11、在一个可能的实现方式中,所述控制模块还包括:
12、频谱特征参数获取模块,用于基于所述横摇角度频率谱提取得到频谱特征参数;
13、失稳评估结果确定模块,用于当确定所述频谱特征参数存在异常,且确定当前通信时刻及上一个通信时刻之间采样到的横摇角速度时间序列和横摇角加速度时间序列存在异常时,输出用于指示所述船舶失稳的失稳评估结果。
14、在一个可能的实现方式中,所述基于所述横摇角度频率谱提取得到频谱特征参数,包括:
15、获取所述横摇角度频率谱的能量峰值点对应的频率值作为峰值频率点,并计算所述横摇角度频率谱在各个频率区间内的区间能量;
16、提取得到所述频谱特征参数;所述频谱特征参数包括所述峰值频率点、峰值振幅和各个频率区间的区间能量。
17、在一个可能的实现方式中,所述确定当前通信时刻及上一个通信时刻之间采样到的横摇角速度时间序列和横摇角加速度时间序列存在异常,包括:
18、当根据所述横摇角速度时间序列和横摇角加速度时间序列确定横摇角速度持续增大且横摇角加速度持续增大时,确定所述横摇角速度时间序列和横摇角加速度时间序列存在异常;
19、或者,根据所述横摇角速度时间序列和横摇角加速度时间序列确定横摇角速度和横摇角加速度同时为0的时段的时长达到时长阈值时,确定所述横摇角速度时间序列和横摇角加速度时间序列存在异常。
20、在一个可能的实现方式中,所述失稳评估结果确定模块包括失稳预警等级指示模块,用于根据失稳预警等级与所述频谱特征参数的异常取值范围的相关性指示所述船舶失稳的程度。
21、在一个可能的实现方式中,所述控制模块还包括稳性裕度指数确定模块,用于按照smi=(t×ω)/α进行计算,并将计算得到的最小值作为所述稳性裕度指数;其中,摇摆周期t是横摇角速度相邻的极大值点和极小值点之间的时间间隔,横摇角速度在极大值点处从正切换为负,横摇角速度在极小值点处从负切换为正;ω是通过所述imu测量模块采样到的横摇角速度,α是通过所述imu测量模块采样到的横摇角加速度。
22、在一个可能的实现方式中,每个所述短报文数据共包含78字节,所述峰值振幅字段、所述预警级别字段和所述稳性裕度指数字段共占用40字节。
23、在一个可能的实现方式中,所述船舶应急通信装置的功耗不超过40瓦,所述应急电池包含四块磷酸铁锂电池,且应急供电时长至少为150小时。
24、第二个方面,本申请还提供了一种船舶,包括船体以及第一个方面所述的面向极限工况的船舶应急通信装置,上述面向极限工况的船舶通信装置布设在船体上。
25、本申请的有益技术效果是:
26、本申请公开了一种面向极限工况的船舶应急通信装置及船舶,该船舶应急通信装置可以加装在船舶上,当船舶进入极限工况时该船舶应急通信装置内的用电器件仍可以正常工作,采集船舶的运动状态数据并生成浮态稳性结果,并通过北斗短报文的形式将监测到的数据上传给岸上监控台,通过各部分的低功耗设计,使得装置整体功耗较小,利用较小的集成电池就能实现长时间的续航,从而保证在极限工况下的持续监测通信,有利于保障船舶的安全性。
27、进一步地,该船舶应急通信装置为了实现低功耗通信,使用北斗短报文机制,为了适应北斗短报文机制的数据量要求,优化了由船舶的运动状态数据生成浮态稳性结果的方法,使得得到的浮态稳性结果可以准确反映船舶的浮态稳性情况且占用较少字节数。
28、此外,该船舶应急通信装置在由船舶的运动状态数据生成浮态稳性结果时无需事前获得船型参数,只需依赖运动状态数据,因此该船舶应急通信装置是一款通用性产品,可以加装在包括集装箱船、散货船之类的各类船型上,应用范围广。
技术特征:1.一种面向极限工况的船舶应急通信装置,其特征在于,包括:舱内组件和舱外组件,所述舱内组件用于布设在船体的船舱内,所述舱外组件用于布设在船体的船舱外;
2.根据权利要求1所述的面向极限工况的船舶应急通信装置,其特征在于,所述运动状态数据包括:所述船舶的横摇角度、横摇角速度和横摇角加速度;
3.根据权利要求2所述的面向极限工况的船舶应急通信装置,其特征在于,所述控制模块包括:
4.根据权利要求3所述的面向极限工况的船舶应急通信装置,其特征在于,所述控制模块还包括:
5.根据权利要求4所述的面向极限工况的船舶应急通信装置,其特征在于,所述基于所述横摇角度频率谱提取得到频谱特征参数,包括:
6.根据权利要求4所述的面向极限工况的船舶应急通信装置,其特征在于,所述确定当前通信时刻及上一个通信时刻之间采样到的横摇角速度时间序列和横摇角加速度时间序列存在异常,包括:
7.根据权利要求4所述的面向极限工况的船舶应急通信装置,其特征在于,所述失稳评估结果确定模块包括失稳预警等级指示模块,用于根据失稳预警等级与所述频谱特征参数的异常取值范围的相关性指示所述船舶失稳的程度。
8.根据权利要求2所述的面向极限工况的船舶应急通信装置,其特征在于,所述控制模块还包括稳性裕度指数确定模块,用于按照smi=(t×ω)/α进行计算,并将计算得到的最小值作为所述稳性裕度指数;
9.根据权利要求2所述的面向极限工况的船舶应急通信装置,其特征在于,每个所述短报文数据共包含78字节,所述峰值振幅字段、所述预警级别字段和所述稳性裕度指数字段共占用40字节;
10.一种船舶,其特征在于,包括船体以及如权利要求1-9中任一项所述的面向极限工况的船舶应急通信装置,所述面向极限工况的船舶应急通信装置布设在所述船体上。
技术总结本申请公开了一种面向极限工况的船舶应急通信装置及船舶,涉及船舶技术领域,该船舶应急通信装置包括舱内组件和舱外组件,穿过船舱的复合缆连接舱内组件和舱外组件,当船舶进入极限工况后,集成电池给船舶应急通信装置中的用电器件进行供电,控制模块通过导航模块获取船舶的位置信息、通过IMU测量模块采样船舶的运动状态数据。在每个通信时刻,根据统计两个通信时刻之间的运动状态数据得到船舶的浮态稳性结果,并根据北斗短报文的通信协议发送给向岸上监控台,通过各部分的低功耗设计,使得装置整体功耗较小,利用集成电池就能实现长时间的应急续航,从而保证在极限工况下的持续监测通信,有利于保障船舶的安全性。
技术研发人员:张玮,周杨柳,许海东,王栋,徐业峻,蒋世同,何斌,黎志平,谭俊,刘帆
受保护的技术使用者:南海西部石油油田服务(深圳)有限公司
技术研发日:技术公布日:2024/1/16