一种用于层析PIV试验的相机自校准系统和方法
本发明具体涉及一种用于层析piv试验的相机自校准系统和方法。
背景技术:
1、在众多流体速度测量方法中,粒子图像测速技术(piv)是一种非接触式的定量测量全流场速度矢量分布的手段,被广泛应用于工业领域。粒子图像测速技术一般由高速相机、激光器以及数据采集计算机构成,利用激光器照射布满示踪粒子的流场测量平面,并通过高速相机捕捉在一定时间间隔下的图像变化,从而获取流场位移信息并计算速度矢量分布。层析piv是一种精确测量三维空间目标流场的3d3c-piv(3dimension 3component piv)技术,在利用其进行流场测量前,需要对位于不同角度的多台高速相机进行校准,以保证重建高质量的三维粒子场。传统的方法一般通过人工进行校准,人工校准不仅需要使用者拥有丰富的经验且需要花费大量的时间成本,因此,亟需开发一套自适应层析piv校准装置,代替人工校准。
技术实现思路
1、为解决上述技术问题,本发明提供一种用于层析piv试验的相机自校准系统和方法,用于自动校准多相机piv试验中的相机,以满足在多种试验环境下快速校准相机的需求,并有效避免手动校准所引起的误差。
2、本发明的目的是通过以下技术方案实现的,一种用于层析piv试验的相机自校准系统包括:旋转台、平移台、激光测距仪、分析单元和控制单元。
3、其中,旋转台设置在平移台上方,旋转台上方设置有相机。
4、激光测距仪设置在相机镜头前端的旋转台上,激光射线与相机视线一致。
5、旋转台可在控制单元的控制下进行细微方向调整。
6、平移台可在控制单元的控制下沿前、后、左和右四个方向进行细微位置调整。
7、旋转台和平移台上的部分设备共同构成控制单元,用于控制旋转台和平移台的运动,构成控制单元的设备与其控制的设备有线或无线连接。
8、分析单元与控制单元连接。
9、分析单元与激光测距仪和相机有线或无线连接。
10、优选的,控制单元包括设置在旋转台上的旋转控制器、设置在平移台上的水平运动驱动器、速度控制器、运动控制台和运动控制器;分析单元可选用计算机进行分析和指令传输。
11、优选的,旋转控制器、水平运动驱动器、速度控制器、运动控制台和运动控制器可选用单片机、转速传感器和位置传感器,控制单元设备彼此之间可通过内置电路及数据线连接。
12、优选的,控制单元通过运动控制台连接数据传输线,或者通过内置无线传输接收模块与分析单元连接。
13、优选的,旋转台包括旋转从动盘、旋转控制器、旋转驱动盘和旋转台座;其中,旋转从动盘和旋转控制器均设置在旋转台座上,旋转控制器与旋转驱动盘有线或无线连接,旋转控制器控制旋转驱动盘的内部电机转动,带动旋转从动盘转动。
14、优选的,平移台包括第一平移台和第二平移台,第一平移台滑动连接于第二平移台上方,第一平移台可沿第二平移台设置方向前后移动;旋转台与第一平移台滑动连接,旋转台可沿第一平移台设置方向前后移动。
15、优选的,第一平移台包括第一平移台顶座、第一侧方滑块、第一水平运动驱动器、第一固定轴、第一侧方导轨、第一速度控制器、第一运动控制台和第一运动控制器;其中,第一平移台顶座固定在旋转台底座下方,第一平移台顶座底面的形状为四边形,四个第一侧方滑块分别设置在第一平移台顶座的四角,第一侧方滑块为凹槽形,两侧壁内部设置有卡合结构;第一固定轴为连续光滑的圆管,其设置在第一平移台底座中心位置,两端与第一平移台底座两端气瓶,两条第一侧方导轨分别设置在第一平移台底座两侧,第一侧方导轨两侧面设置有凹槽,第一侧方滑块与第一侧方滑轨滑动连接,第一侧方滑块的卡合结构与第一侧方导轨两侧面的凹槽卡合;第一水平运动驱动器设置在第一平移台顶座下方,对应第一固定轴的正上方,第一水平运动驱动器底面设置弧形凹槽,与第一固定轴连接;第一运动控制台固定在第一平移台底座前端,第一速度控制器和第一运动控制器布置于第一运动控制台的台面上。
16、优选的,第二平移台与第一平移台结构完全一致,第二平移台与第一平移台在运动方向上呈垂直布置,通过第二平移台顶座固定在第一平移台下方,通过第二侧方滑块和第二侧方滑轨的滑动连接,使得第一平移台能够沿着第二平移台设置方向移动。
17、优选的,第一运动控制台上可布置多个按钮,用于手动控制第一平移台运动;第一速度控制器上设置用于调整转速的按钮;第一运动控制器接收第一速度控制器以及第一运动控制台通过按钮传输的信息,控制第一水平运动驱动器,沿第一固定轴进行水平运动,第一固定轴相对光滑,水平运动驱动器在可在第一固定轴上滑动。
18、本发明除了提供一种用于层析piv试验的相机自校准系统外,还进一步提供一种使用上述自校准系统进行相机自校准的方法,具体步骤如下:
19、步骤1:将多台相机自校准系统按照tomopiv实验要求摆放到位,打开激光测距仪,调整旋转台使得每个激光测距仪的激光点都对准标定板中心点,传输此时激光测距仪所测距离值到分析单元;
20、步骤2:分析单元根据相机获取到的标定板信息,计算需要调整的角度和距离,并将调整信息分别传输给旋转台和平移台,继而控制旋转台调整角度、平移台移动位置;
21、步骤3:激光测距仪获取调整后的距离信息,角度信息,根据初始角度、旋转台旋转角度以及平移台移动距离进行计算,再次将相机获取的标定板图片传输到分析单元,并根据此时相机角度与距离信息计算下一步旋转台需要偏转的角度和平移台需要移动的距离;
22、步骤4:重复步骤2至步骤3,直至多台相机标定板信息误差小于预设精度要求。
23、与现有技术相比,本发明具备以下优点:
24、本发明提供的一种用于层析piv试验的相机自校准系统和方法,自校准系统包括旋转台、激光测距仪、平移台、控制单元和分析单元,相机和测距仪设置在旋转台上,旋转台在控制单元的控制下进行角度调整,平移台设置在旋转台下方,可在控制单元的控制下沿着前后左右四个方向进行位置调整。在校准时,通过多台自校准系统搭载不同位置的相机,并通过分析单元分析相机获取到的标定板信息,得出相机需要调整的角度和距离,进一步控制旋转台和平移台按照得出的结果进行角度和位置的调整,直至相机标定板信息误差小于预设精度要求。本发明提供的一种用于层析piv试验的相机自校准系统和方法,相比于传统的人工标定方法,精度和效率更高。本发明提供的用于层析piv试验的相机自校准系统结构简单,操作简便,能够适用于各类多相机多角度拍摄图像采集试验的相机校准工作。
技术特征:
1.一种用于层析piv试验的相机自校准系统,其特征在于:所述自校准系统包括旋转台、平移台、激光测距仪(2)、分析单元(23)和控制单元;
2.如权利要求1所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述控制单元包括设置在旋转台上的旋转控制器、设置在平移台上的水平运动驱动器、速度控制器、运动控制台和运动控制器;所述分析单元(23)可选用计算机进行分析和指令传输。
3.如权利要求2所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述旋转控制器、水平运动驱动器、速度控制器、运动控制台和运动控制器可选用单片机、转速传感器和位置传感器,所述控制单元设备彼此之间可通过内置电路及数据线连接。
4.如权利要求3所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述控制单元通过所述运动控制台连接数据传输线,或者通过内置无线传输接收模块与所述分析单元连接。
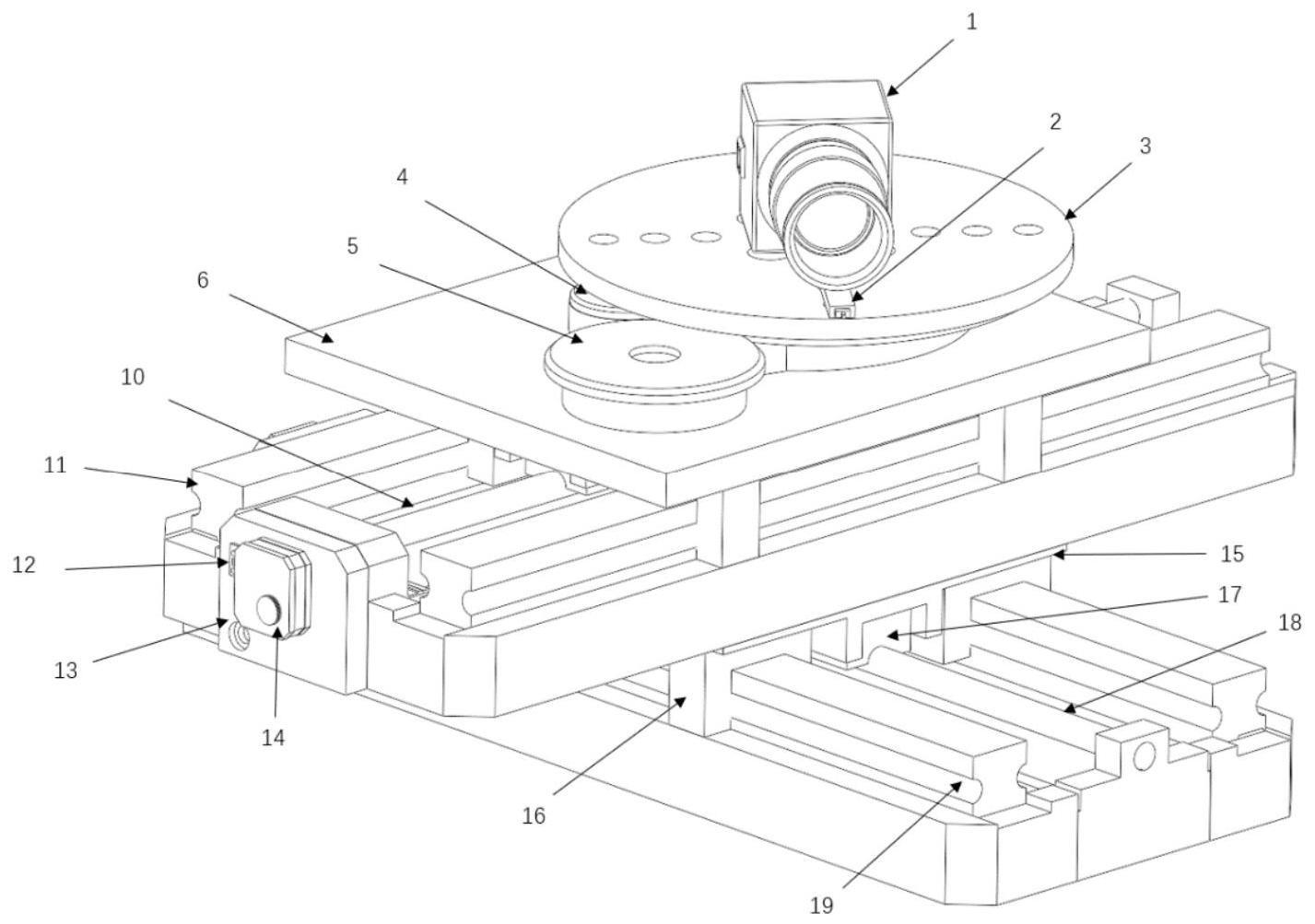
5.如权利要求1所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述旋转台包括旋转从动盘(3)、旋转控制器(4)、旋转驱动盘(5)和旋转台座(6);其中,所述旋转从动盘(3)和所述旋转控制器(4)均设置在所述旋转台座(6)上,所述旋转控制器(4)与所述旋转驱动盘(5)有线或无线连接,所述旋转控制器(4)控制所述旋转驱动盘(5)的内部电机转动,带动所述旋转从动盘(3)转动。
6.如权利要求1所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述平移台包括第一平移台和第二平移台,所述第一平移台滑动连接于所述第二平移台上方,所述第一平移台可沿所述第二平移台设置方向前后移动;所述旋转台与所述第一平移台滑动连接,所述旋转台可沿所述第一平移台设置方向前后移动。
7.如权利要求6所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述第一平移台包括第一平移台顶座(7)、第一侧方滑块(8)、第一水平运动驱动器(9)、第一固定轴(10)、第一侧方导轨(11)、第一速度控制器(12)、第一运动控制台(13)和第一运动控制器(14);其中,所述第一平移台顶座(7)固定在所述旋转台底座(6)下方,所述第一平移台顶座(7)底面的形状为四边形,四个所述第一侧方滑块(8)分别设置在所述第一平移台顶座(7)的四角,所述第一侧方滑块(8)为凹槽形,两侧壁内部设置有卡合结构;所述第一固定轴(10)为连续光滑的圆管,其设置在所述第一平移台底座中心位置,两端与所述第一平移台底座两端气瓶,两条所述第一侧方导轨(11)分别设置在第一平移台底座两侧,所述第一侧方导轨(11)两侧面设置有凹槽,所述第一侧方滑块(8)与所述第一侧方滑轨(11)滑动连接,所述第一侧方滑块(8)的卡合结构与所述第一侧方导轨(11)两侧面的凹槽卡合;所述第一水平运动驱动器(9)设置在所述第一平移台顶座(7)下方,对应所述第一固定轴(10)的正上方,所述第一水平运动驱动器(9)底面设置弧形凹槽,与所述第一固定轴(10)连接;所述第一运动控制台(13)固定在所述第一平移台底座前端,所述第一速度控制器(12)和所述第一运动控制器(14)布置于所述第一运动控制台(13)的台面上。
8.如权利要求6所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述第二平移台与所述第一平移台结构完全一致,所述第二平移台与所述第一平移台在运动方向上呈垂直布置,通过所述第二平移台顶座(15)固定在所述第一平移台下方,通过所述第二侧方滑块(16)和所述第二侧方滑轨(17)的滑动连接,使得所述第一平移台能够沿着所述第二平移台设置方向移动。
9.如权利要求7所述的一种用于层析piv试验的相机自校准系统,其特征在于:所述第一运动控制台(13)上可布置多个按钮,用于手动控制所述第一平移台运动;所述第一速度控制器(12)上设置用于调整转速的按钮;所述第一运动控制器(14)接收所述第一速度控制器(12)以及所述第一运动控制台(13)通过按钮传输的信息,控制第一水平运动驱动器(9),沿第一固定轴(10)进行水平运动,所述第一固定轴(10)相对光滑,所述水平运动驱动器(9)在可在所述第一固定轴(10)上滑动。
10.一种层析piv试验相机自校准方法,其特征在于:使用权利要求1-9任一项所述的相机自校准系统,按以下步骤进行:
技术总结
本发明公开了一种用于层析PIV试验的相机自校准系统和方法,自校准系统包括旋转台、激光测距仪、平移台、控制单元和分析单元,相机和测距仪设置在旋转台上,旋转台在控制单元的控制下进行角度调整,平移台设置在旋转台下方,可在控制单元的控制下沿着前后左右四个方向进行位置调整。在校准时,通过多台自校准系统搭载不同位置的相机,并通过分析单元分析相机获取到的标定板信息,得出相机需要调整的角度和距离,进一步控制旋转台和平移台按照得出的结果进行角度和位置的调整,直至相机标定板信息误差小于预设精度要求。
技术研发人员:韩阳,朱军鹏,郭春雨,李若欣,赵大刚,孙聪,孙越
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!