一种自动化激光三维扫描系统
本技术属于三维激光扫描,尤其涉及一种自动化激光三维扫描系统。
背景技术:
1、三维扫描重建技术是一种基于光学成像或激光扫描等技术,通过对物体表面进行高精度扫描获取其三维形貌的技术,可用于加工质量检测、逆向工程、文物数字化等用途。面对日渐增长的对高精度、高效率、低成本的物体表面三维轮廓数据需求,将三维扫描重建技术和机器人技术、智能算法相结合,代替人工完成扫描方案的规划和执行,实现完全自动扫描,对扩展该技术的应用广度和深度有重要的意义。
2、但是,现有的激光三维扫描系统,大部分仍然采用人工编程示教的方式:需要针对每一种零件,完全人工地指定机器人中扫描轨迹,构成一个扫描轨迹库。现场执行时从扫描轨迹库中查找适配当前被扫描对象的轨迹,然后执行轨迹。此种方案规划扫描轨迹所需时间长,不具备现场适配新的扫描对象的可能,所规划的轨迹不能充分利用扫描仪的性能,不必要的重复扫描和过渡动作延长了扫描所需时间,并且,由于人为主观经验与客观事实存在不可避免的误差,导致扫描结果精准度较低、扫描效率较低。
技术实现思路
1、本技术提供了一种自动化激光三维扫描系统,可以解决传统激光三维扫描系统的扫描结果精准度较低、扫描效率较低的问题,实现激光三维扫描的全自动化。
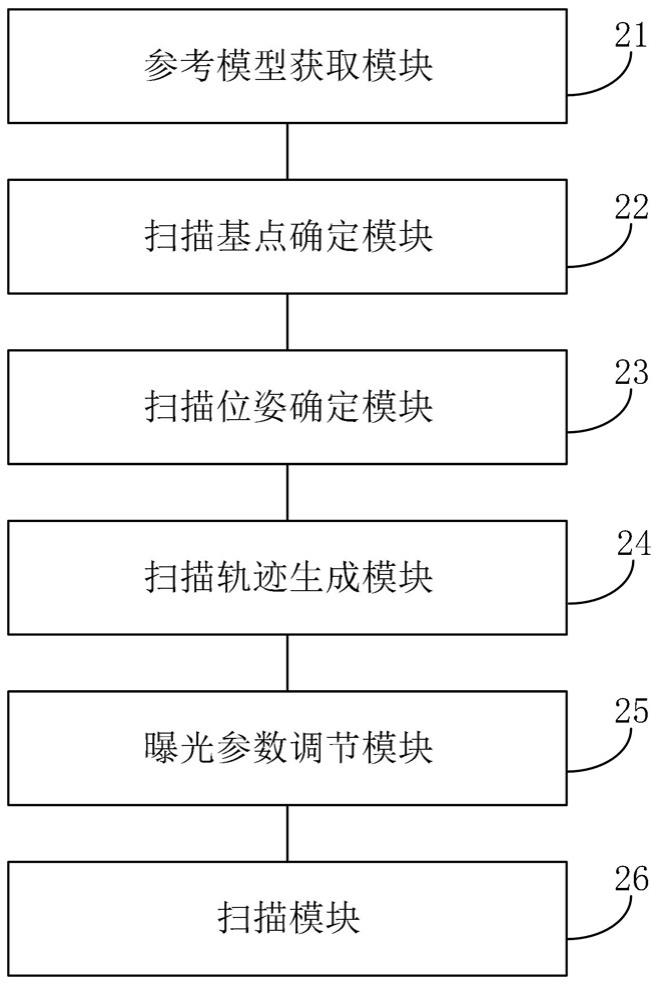
2、本技术提供的一种自动化激光三维扫描系统,包括参考模型获取模块、扫描基点确定模块、扫描位姿确定模块、扫描轨迹生成模块、曝光参数调节模块以及扫描模块;
3、参考模型获取模块,用于获取扫描目标对应的三角网络模型;三角网络模型包括多个三角面片;
4、扫描基点获取模块,用于多个三角面片进行划分,得到多个体素,获取多个体素中每个体素的切面法向量,根据切面法向量确定用于对体素进行切割的切面,并根据切面确定多个扫描基点;多个体素互不相同,多个体素中每个体素包括至少一个三角面片;
5、扫描位姿确定模块,用于根据预先构建的扫描价值函数,确定扫描基点对应的最佳扫描位姿和最佳扫描速度;最佳扫描位姿表示最高扫描价值对应的扫描位姿,最佳扫描速度表示最高扫描价值对应的扫描速度;
6、扫描轨迹生成模块,用于根据所有最佳扫描位姿和所有最佳扫描速度,生成扫描轨迹;
7、曝光参数调节模块,用于调节扫描轨迹的曝光参数;
8、扫描模块,用于根据扫描轨迹和曝光参数,对扫描目标进行扫描。
9、可选的,获取扫描目标对应的三角网络模型,包括:
10、判断扫描目标是否携带自身的cad数据;
11、若扫描目标携带自身的cad数据,则根据cad数据生成扫描目标对应的三角网络模型;否则,
12、采集扫描目标的点云数据,并根据点云数据生成扫描目标对应的三角网络模型。
13、若扫描目标携带的cad数据不完整,则根据cad数据生成扫描目标对应的部分点云数据,然后采集扫描目标的完整点云数据,合并部分点云数据和完整点云数据,并根据合并后的点云数据生成扫描目标对应的三角网络模型。
14、可选的,体素包括平面体素、球面体素、圆柱面体素以及圆锥面体素;
15、可选的,获取多个体素中每个体素的切面法向量,包括:
16、针对平面体素,构建平面体素对应的拟合平面,在拟合平面上构建平面体素的二维obb包围盒,并将二维obb包围盒的短轴作为平面体素的切面法向量;
17、针对球面体素,构建球面体素的三维obb包围盒,并将三维obb包围盒的短轴作为球面体素的切面法向量;
18、针对圆柱面体素,构建圆柱面体素的三维obb包围盒,并将圆柱面体素的圆柱轴线作为圆柱面体素的切面法向量;
19、针对圆锥面体素,构建圆锥面体素的三维obb包围盒,并将圆锥面体素的圆锥轴线作为圆锥面体素的切面法向量。
20、可选的,根据多个体素中每个体素的切面法向量,确定用于对体素进行切割的切面,并根据切面确定多个扫描基点,包括:
21、通过计算公式
22、
23、
24、得到等分点数量;其中,表示向上取整,表示扫描路径的数量,表示扫描路径的重叠率,表示分布宽度,分布宽度表示体素中所有三角面片中心点在该体素切面法向量上的投影点分布区间长度,表示切面间隔,所述切面间隔为一预先设定的常数;
25、根据等分点数量对投影点分布区间长度进行平均划分,得到多个划分点,根据多个划分点和切面法向量,得到切面;切面的数量等于划分点的数量;
26、获取切面和体素之间的连续交线,得到连续交线集;连续交线表示切面在体素中相邻三角面片的交线;
27、对连续交线集进行等距采样,得到扫描基点;每个体素对应至少一个扫描基点。
28、可选的,扫描价值函数的表达式如下:
29、
30、其中,表示扫描位姿和扫描速度对应的扫描价值,表示三角面片的测量价值权重,默认值为1,表示的第个可扫描三角面片的测量价值,可扫描三角面片表示能够被扫描到的三角面片,,表示第个可扫描三角面片的重复测量价值,,表示参考速度,表示第次扫描到第个可扫描三角面片的速度,表示第个可扫描三角面片的精度价值,,表示扫描标准差期望值,表示扫描仪精度模型估计的扫描标准差,所述扫描仪精度模型由预先采集的实测数据构成,表示运动耗时权重,表示扫描仪从上一个扫描位姿移动到当前扫描位姿花费的时间,表示碰撞风险权重,默认值为1,表示碰撞风险,,表示各扫描部件之间距离的最小值,表示预先设置的各扫描部件之间距离的极限值。
31、可选的,根据所有最佳扫描位姿和所有最佳扫描速度,生成扫描轨迹,包括:
32、分别针对每个扫描基点,分别对扫描基点对应的最佳扫描位姿和最佳扫描速度进行插补,得到扫描基点对应的扫描位姿曲线;扫描位姿曲线表征扫描基点对应的扫描轨迹;
33、根据所有扫描位姿曲线,构建加权有向图;加权有向图的顶点和扫描位姿曲线一一对应;
34、计算加权有向图的最短遍历路径,得到扫描轨迹。
35、可选的,调节扫描轨迹的曝光参数,包括:
36、分别针对扫描轨迹中的每个轨迹点,执行以下操作:
37、通过计算公式
38、
39、得到轨迹点的平均反射指标;其中,表示第个轨迹点的平均反射指标,表示第个轨迹点对应的可见光图像中第个像素的红通道亮度,可见光图像通过rgb-d相机获取,表示第个轨迹点对应的可见光图像中第个像素的绿通道亮度,表示第个轨迹点对应的可见光图像中第个像素的蓝通道亮度,表示rgb-d相机的光圈值,表示rgb-d相机的感光度,表示表示第个轨迹点中的像素总数量,表示rgb-d相机的快门时间;
40、根据平均反射指标和预先设置的灰度索引表,调节轨迹点对应的曝光参数。
41、可选的,自动化激光三维扫描系统还包括扫描轨迹修正模块;
42、扫描轨迹修正模块,用于对扫描轨迹进行修正。
43、可选的,对扫描轨迹进行修正,包括:
44、当扫描轨迹存在碰撞风险时,返回执行扫描轨迹生成模块,直到扫描轨迹生成模块生成的新扫描轨迹不存在碰撞风险;其中,当时,确定扫描轨迹不存在碰撞风险,表示各扫描部件之间距离的最小值,表示预先设置的各扫描部件之间距离的极限值。
45、本技术的上述方案有如下的有益效果:
46、本技术提供的自动化激光三维扫描系统利用扫描基点获取模块获取每个体素的切面法向量,根据切面法向量确定用于对体素进行切割的切面,并根据切面确定多个扫描基点,能够获取扫描目标合适的扫描基点,从而有利于得到准确的扫描轨迹,提高扫描的精确度;利用扫描位姿确定模块,根据扫描价值函数,确定扫描基点对应的最佳扫描位姿和最佳扫描速度,能够从安全、精度等维度,对每个扫描基点的扫描位姿和扫描速度进行精确的控制,从而提高扫描的精确度、减少扫描所需时间;利用曝光参数调节模块调节扫描轨迹的曝光参数,能够避免扫描目标各区域不同反射特性对扫描的影响,提高扫描的精确度;本技术提供的自动化激光三维扫描系统在扫描时不需要人工干涉,减少了各环节的衔接时间、扫描前轨迹规划时间,扫描所需时间,完全实现自动化,提高扫描的整体效率。
47、本技术的其它有益效果将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!