一种基于小偏量测试的丝杆型摄像装置控制方法
本发明涉及摄像装置目标跟踪领域,具体涉及一种基于小偏量测试的丝杆型摄像装置控制方法,可用于需要进行目标快速定位拍摄的等各种场景。
背景技术:
1、基于丝杆的摄像装置是目标快速定位拍摄的常用方案,其通常由带减速器的伺服电机、丝杆、摄像头和控制电路组成。控制电路根据摄像头拍摄结果得出图片上被拍照对象与目标位置之间的坐标差异,再根据反馈环路控制原理将该坐标差异转换为反馈补偿量,根据反馈补偿量驱动伺服电机旋转使安置于丝杆滑块上的摄像头产生相应的位移,从而消除该坐标差异达到满意的拍摄效果。为了提高摄像装置调整摄像头位置时的的速度和精度,往往需要事对该摄像装置进行训练,测试得到在各种使用场景下的反馈环路各环节参数,以便精确地计算出反馈补偿量。由于摄像装置在各种场景使用时其外因素(如温度、湿度、供电电压等)和内因素(如丝杆倾斜角度、摄像头变焦)都可能发生变化,这使得传统训练方法变得很低效,最终造成摄像装置无法进行精确反馈补偿以消除被拍照对象与目标位置之间的坐标差异,甚至还可能造成摄像装置功能失效。
2、有鉴于此,本发明专利提出一种基于小偏量测试的丝杆型摄像装置控制方法,无需要求对摄像装置进行训练,便可以在各种摄像装置外因素或内因素变化时,快速有效地实时测试得到反馈量,进而精确计算出反馈补偿量而消除被拍照对象与目标位置之间的坐标差异。
技术实现思路
1、本发明的目的在于:提供一种基于小偏量测试的丝杆型摄像装置控制方法,它利用小偏量测试方法,能够实时测量得到摄像装置中负反馈环路的参数,进而精确计算出反馈补偿量而消除被拍照对象与目标位置之间的坐标差异。
2、本发明通过如下技术方案实现:一种可实现目标快速定位拍摄的丝杆型摄像装置控制方法,它基于摄像目标快速定位机构实现,所述摄像目标快速定位机构包括图像采集模块、控制单元和传输机构,其中,图像采集模块安装于传输机构上并通过传输机构实现位移,控制单元同时与图像采集模块和传输机构连接,控制单元通过图像采集模块反馈的信息控制图像采集模块的位移;
3、它包括如下步骤:
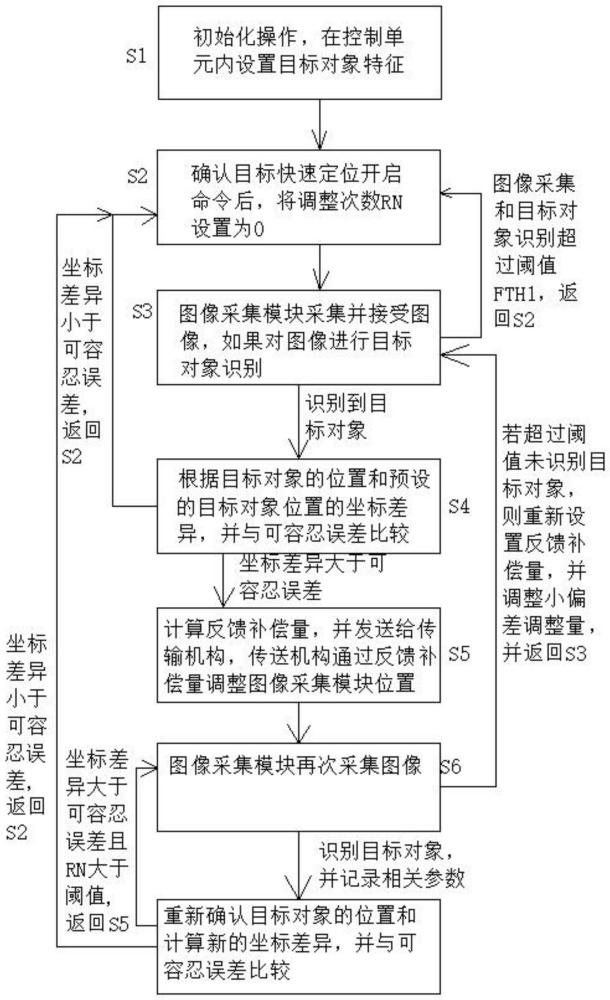
4、s1:初始化操作,在控制单元内设置目标对象特征,设置目标位置tpv,小偏差调整量drv、可容忍误差eev、识别失败阈值fth1、调整次数阈值rth2,进入s2;
5、s2:等待目标快速定位开启命令,接收到目标快速定位开启命令后,将调整次数rn设置为0,进入s3;
6、s3:控制单元向图像采集模块发出图像采集命令,并保存接收的图像;控制单元根据保存的目标对象特征对图像内容进行识别,如未识别到目标对象重新进行图像采集;目标对象识别成功,则进入s4;若图像采集和目标对象识别次数超过了阈值fth1,则发出目标对象识别失败警告并返回s2;
7、s4:控制单元确定出目标对象在图片内的位置cpv,计算出cpv与tpv之间的坐标差异epv,判断epv绝对值是否小于可容忍误差eev,如果小于可容忍误差eev,则返回s2;如果大于可容忍误差eev,则epv保存为pepv后进行s5;
8、s5:控制单元计算反馈补偿量fbcv=drv*epv/pepv并保存;将fbcv发送给传输机构,传输机构根据反馈补偿量fbcv调整图像采集模块的位置,进入s6;
9、s6:图像采集模块位置调整完毕后,控制单元向图像采集模块发出图像采集命令,并保存接收的图像;并根据保存的图像进行目标对象的识别;
10、如控制单元未识别到目标对象次数超过fth1,则将fbcv保存pfbcv,重新设置反馈补偿量fbcv=-1*pfbcv,将fbcv发送给传输机构;将drv保存为prv且drv设置为drv=k*prv其中参数k为介于(0,0.5)之间的数,并返回s3;
11、如成功识别目标对象,将s4记录的cpv转化为ppv、原坐标差异epv转换为pepv,小偏差调整量drv保存为上次已执行调整量prv;rn累加1,进入s7;
12、s7:重新确定出目标对象在图片内的位置cpv并计算新的坐标差异epv,判断此时epv的绝对值是否小于可容忍误差eev,如果小于可容忍误差eev,则返回s2;如果大于可容忍误差eev且rn小于rth2则进行s5,否则发出调整失败警告并返回s2;
13、较之前技术而言,本发明的有益效果为:
14、1、本发明能够通过实时测量参数来自适应改变参数补偿,从而在非线性影响下,依然能够保证装置能够快速的实现摄像目标自动跟踪。
技术特征:
1.一种基于小偏量测试的丝杆型摄像装置控制方法,其特征在于:它基于摄像目标快速定位机构实现,所述摄像目标快速定位机构包括图像采集模块(1)、控制单元(2)和传输机构,其中,图像采集模块安装于传输机构上并通过传输机构实现位移,控制单元同时与图像采集模块和传输机构连接,控制单元通过图像采集模块反馈的信息控制图像采集模块的位移;
2.根据权利1所述的一种基于小偏量测试的丝杆型摄像装置控制方法,其特征在于:所述传输机构包括步进电机(3)和丝杆(4),所述图像采集模块与丝杆螺纹配合,且图像采集模块通过导轨滑移连接于基板上,实现通过丝杆的转动带动图像采集模块的位移。
3.根据权利1所述的一种摄像目标快速跟踪方法,其特征在于:所述图像采集模块为摄像头。
技术总结
本发明为一种基于小偏量测试的丝杆型摄像装置控制方法,本发明通过如下技术方案实现:一种可实现目标快速定位拍摄的丝杆型摄像装置控制方法,它基于摄像目标快速定位机构实现,它利用小偏量测试方法,能够实时测量得到摄像装置中负反馈环路的参数,进而精确计算出反馈补偿量而消除被拍照对象与目标位置之间的坐标差异。较之前技术而言,本发明的有益效果为:本发明能够通过实时测量参数来自适应改变参数补偿,从而在非线性影响下,依然能够保证装置能够快速的实现摄像目标自动跟踪。
技术研发人员:李灿东,周常恩,杨朝阳,雷黄伟,赖新梅,辛基梁,张斐
受保护的技术使用者:福建中医药大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!